目录
壹 创建骨骼
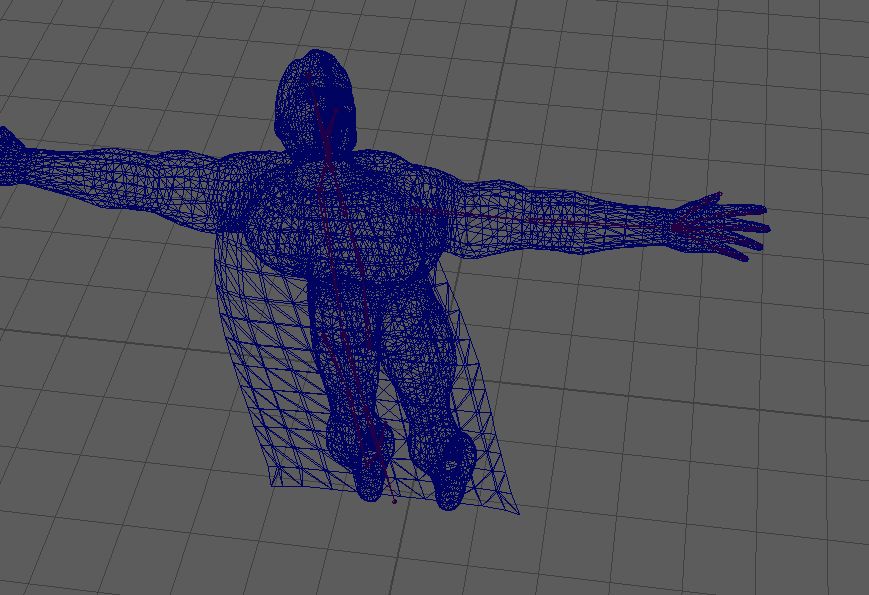
1 准备一个模型
2 创建骨骼
腿部骨骼
躯体骨骼
嘴巴骨骼
披风骨骼
手臂骨骼
手指骨骼
3 给骨骼命名
4 调整关节的坐标轴
测试
5 镜像骨骼
贰 控制器
一 脚部控制 IK
1 脚部IK创建
腿部IK
脚掌IK
2 脚部IK打组
动作1:脚掌着地,抬脚后跟
动作2:抬前脚掌
动作3:脚尖着地,抬脚后跟
动作4:抬全脚掌
显示IK控制柄
3 脚部控制器
注意点1:控制器的轴心点
注意点2 :控制器坐标清0
注意点3:删除历史记录
建立层级关系
修改控制器颜色
4 创建另一个脚部控制器
二 手部控制 FK
手臂控制器FK
建立父子关系
手指控制 (略)
三 脊柱控制器 FK(略)
四 下颚(嘴部)控制器 IK
五 披风 FK(略)
六 全局控制器
叁 烘焙动画和导出
一 整理通道栏
二 蒙皮绑定、蒙皮权重
1 绑定骨骼和蒙皮
2 蒙皮权重
三 建立角色组
四 制作动画
1 脚部 手部 姿势
2 腰部动作
3 头部动作
五 烘焙动画到骨骼
1 烘焙动画到骨骼
2 删掉控制器
六 导出
壹 创建骨骼
1 准备一个模型
2 创建骨骼
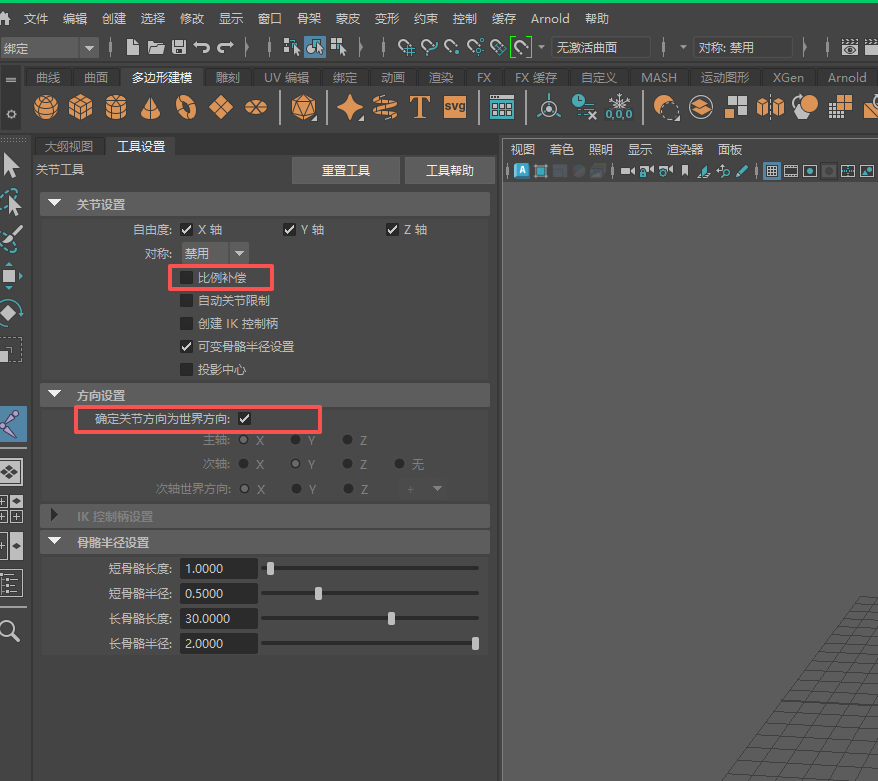
骨骼--创建关节 的工具设置里,确保 取消勾选 比例补偿,勾选世界方向
腿部骨骼
切换到侧面,参考下面的图创建骨骼:一共5个点
大腿、膝盖、脚踝、前脚掌、脚尖(从上往下点)
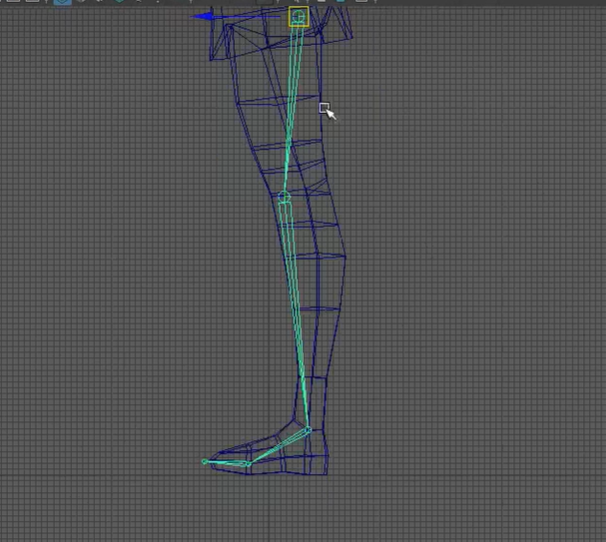
(调整骨骼的大小:显示--动画--关节大小)
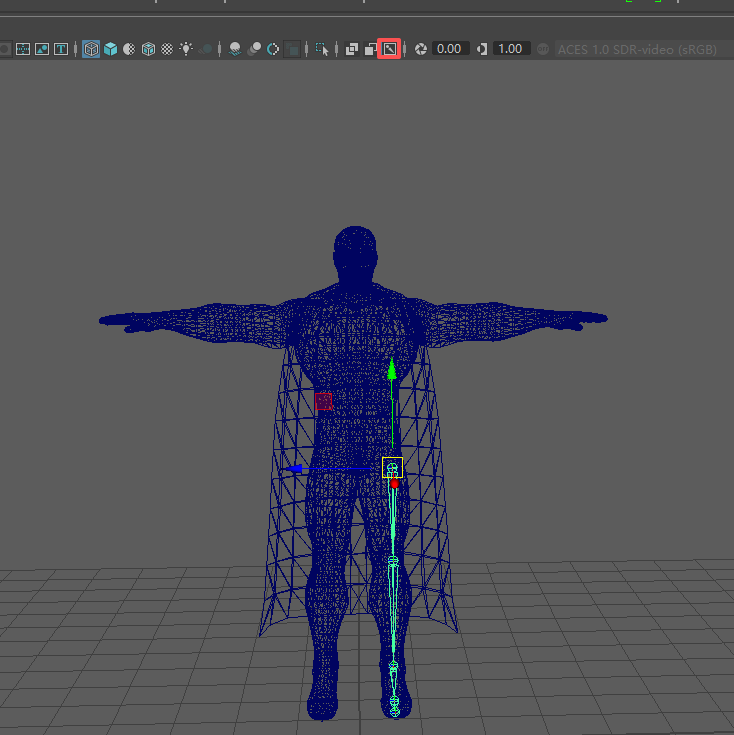
创建好了,切换到前面
把创建好的骨骼移到腿上面,打开X射线关节那个图标
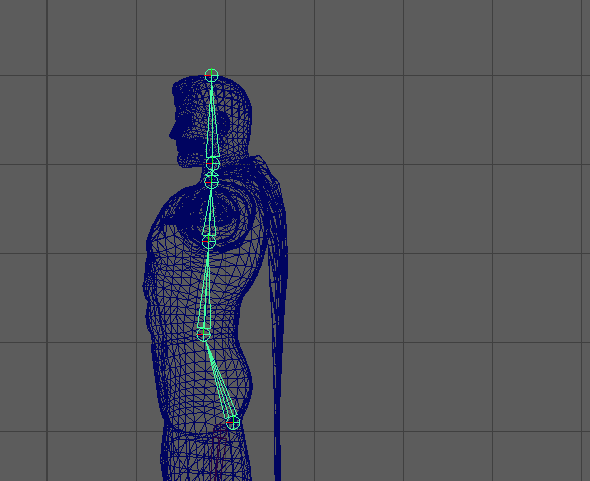
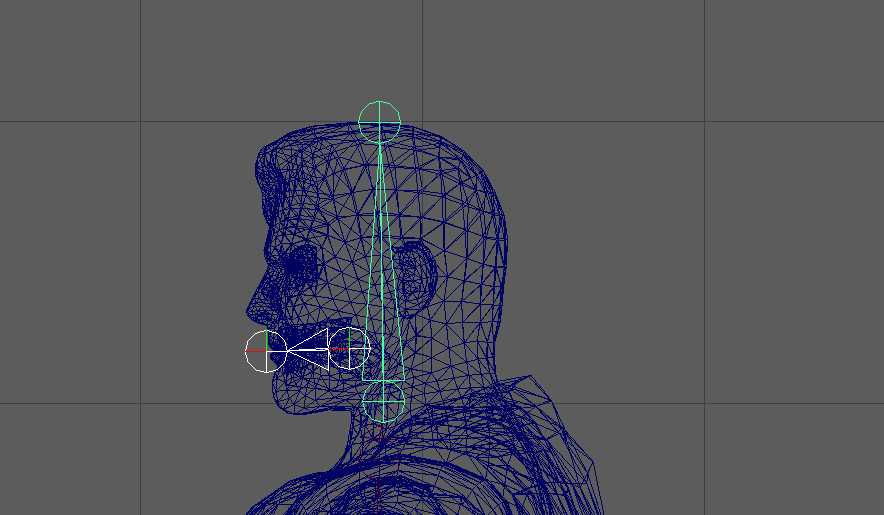
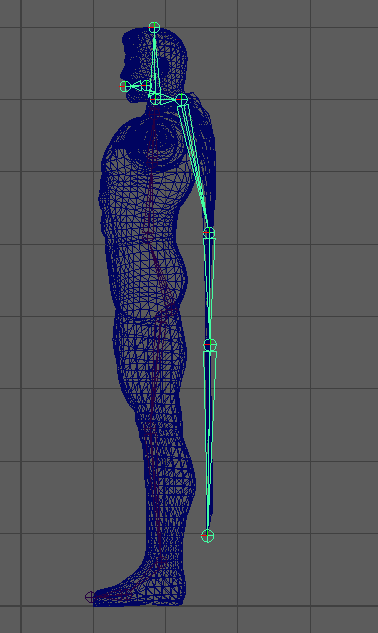
躯体骨骼
切换到侧面,创建躯体骨骼,6个点:
腿、腰、胸、脖子下端、脖子上端、头顶
(回车前 按住D + 鼠标移动:移动骨骼一个关节位置)
、
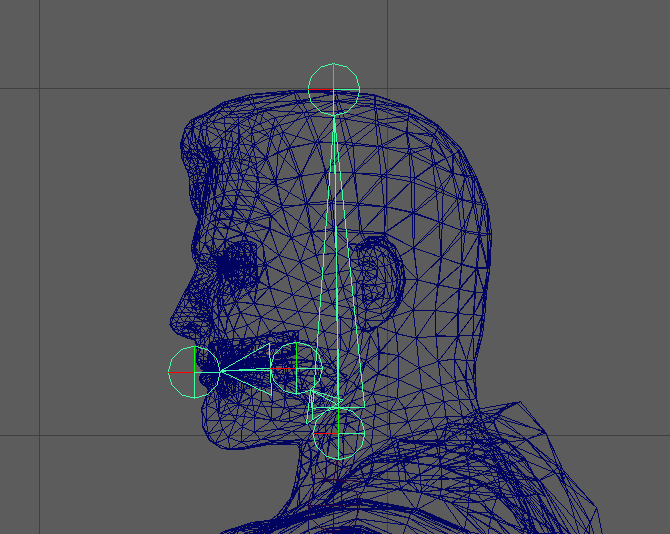
嘴巴骨骼
嘴巴骨骼连接躯体骨骼
选中两段骨骼,按P
连接完了就是这样
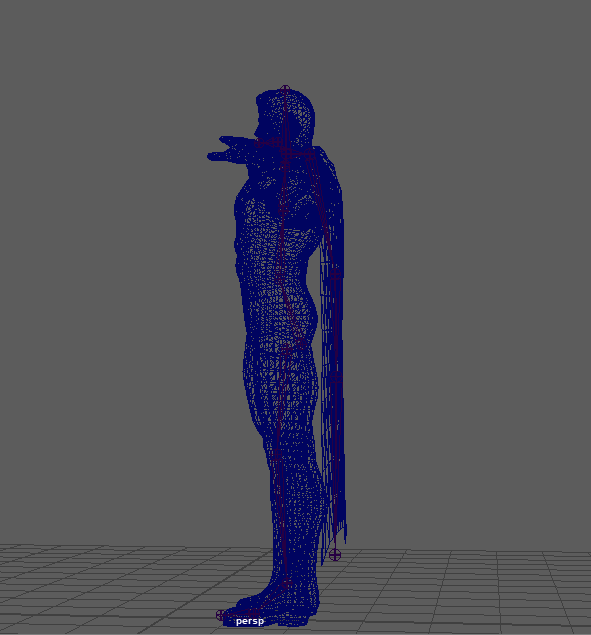
披风骨骼
也是连接到躯体(按P)
回到透视视图,检查下骨骼在不在身体和衣服上(不在的话,调整骨骼的位置)
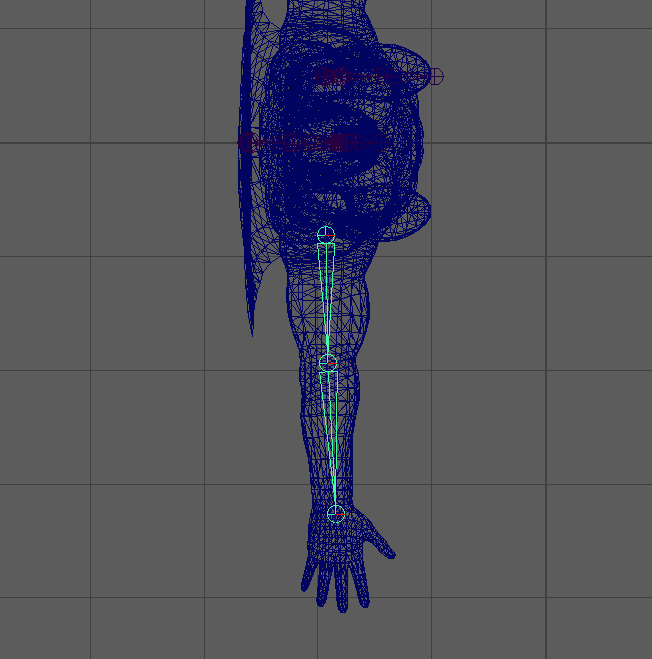
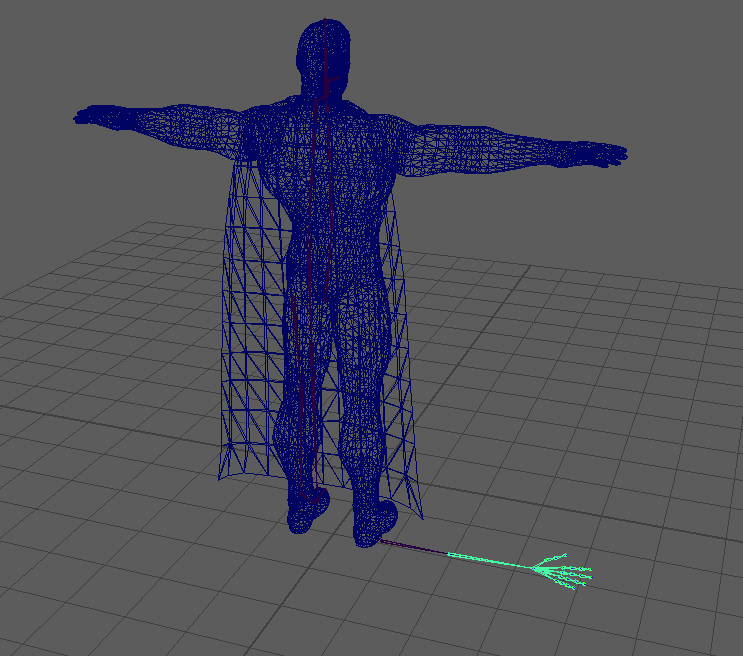
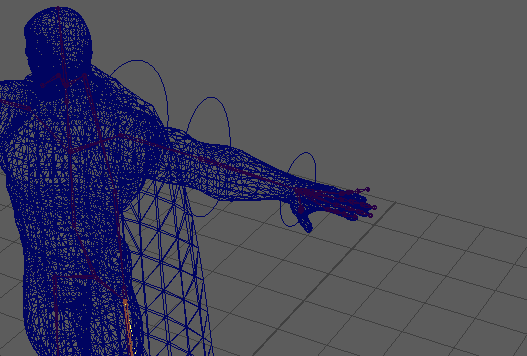
手臂骨骼
切换到顶视图,创建手臂的骨骼
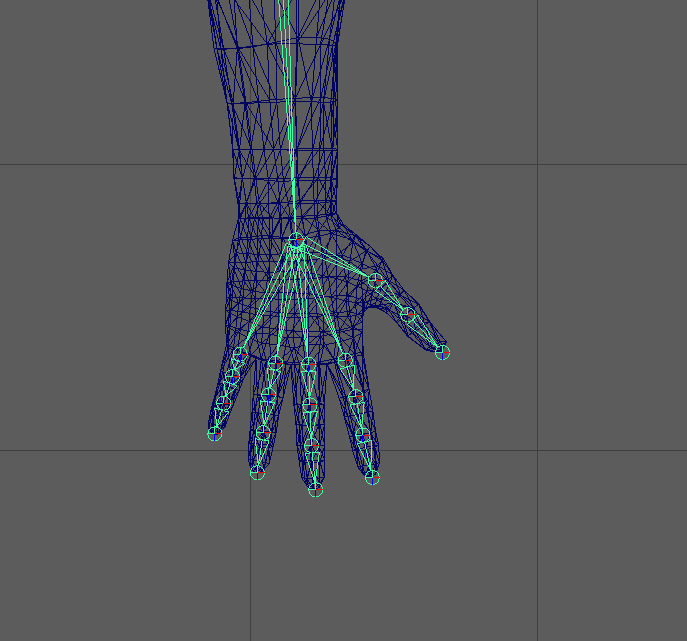
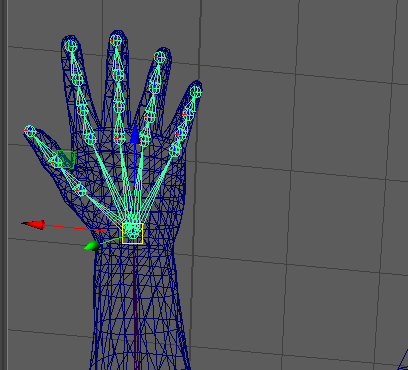
手指骨骼
大拇指3个节点,其他手指都4个节点
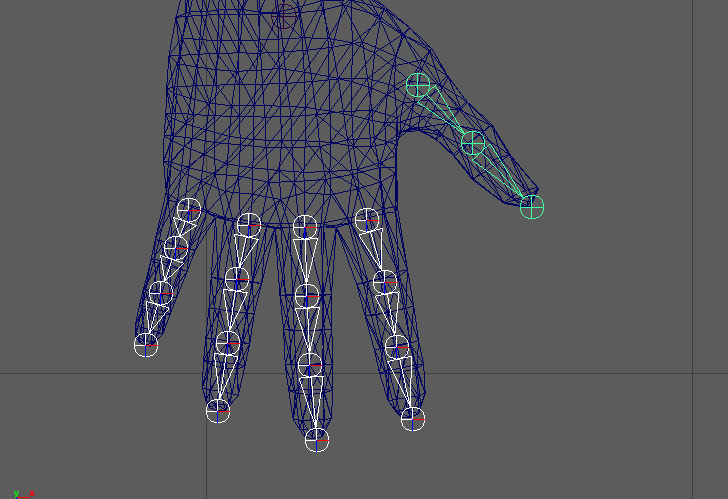
再把手指的骨骼连接到手腕上(选中5根手指的骨骼,选中手腕那个点,按P键)
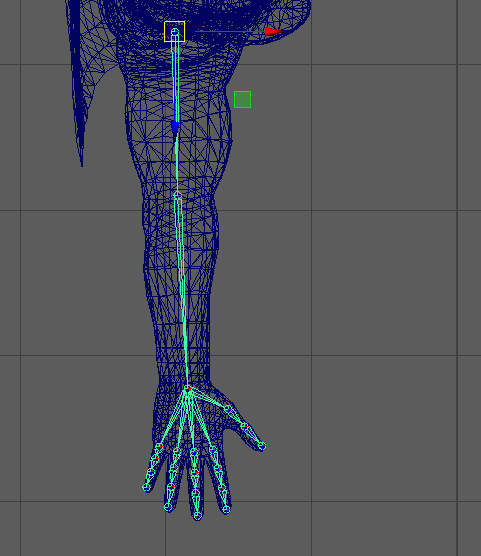
切换到透视视图
把手臂的骨骼移到胳膊上
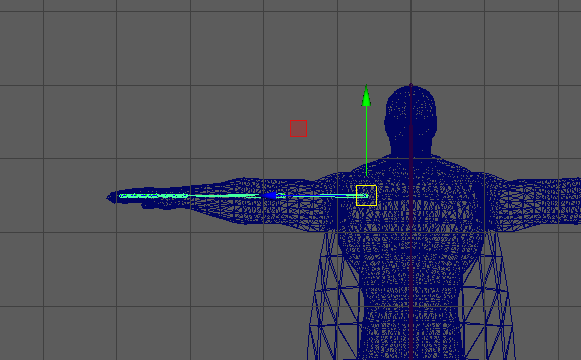
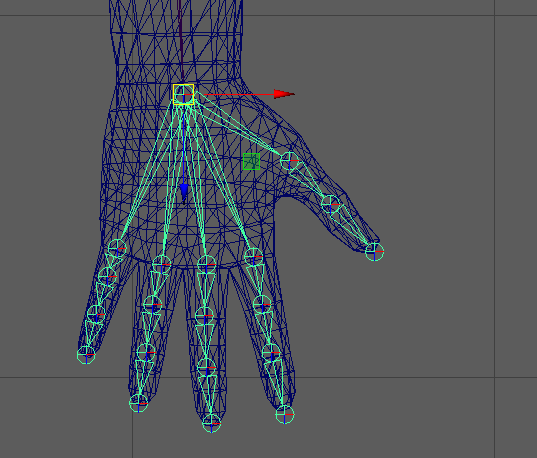
再切换到顶视图
把手指头没对齐的微调一下位置
最后回到顶视图把手指头的位置再定一下
最后把手臂的骨骼和胸部的骨骼做一个连接
3 给骨骼命名
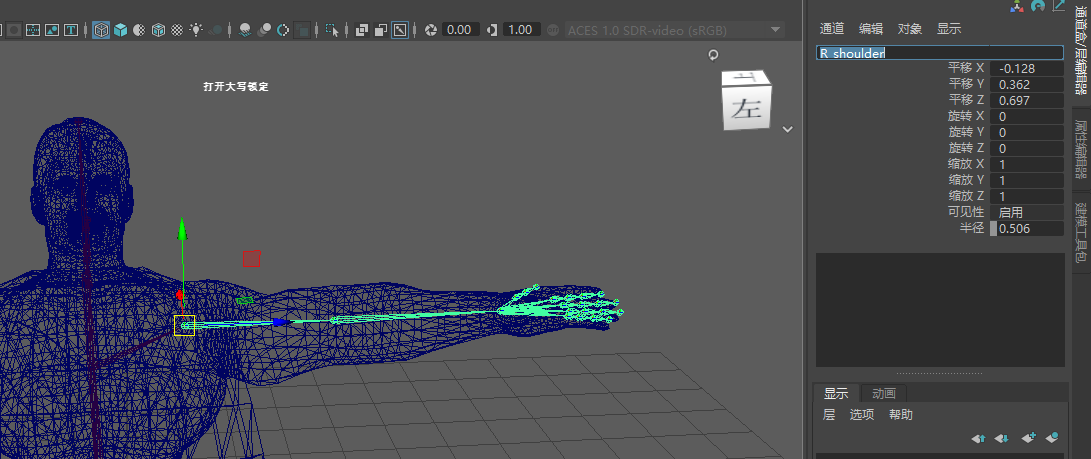
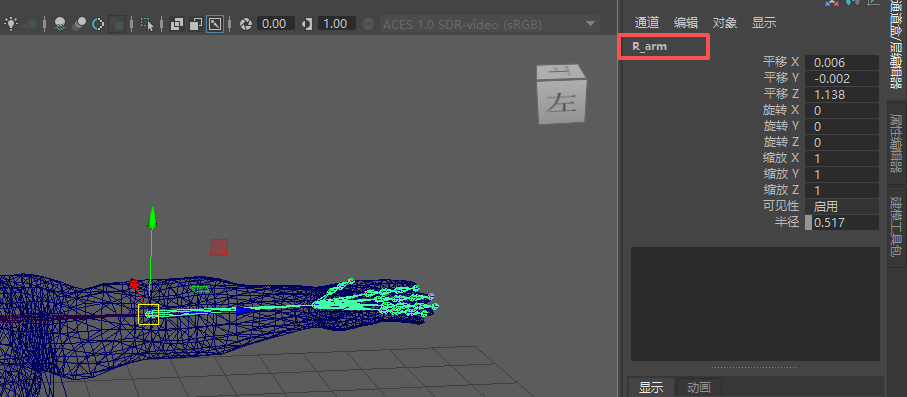
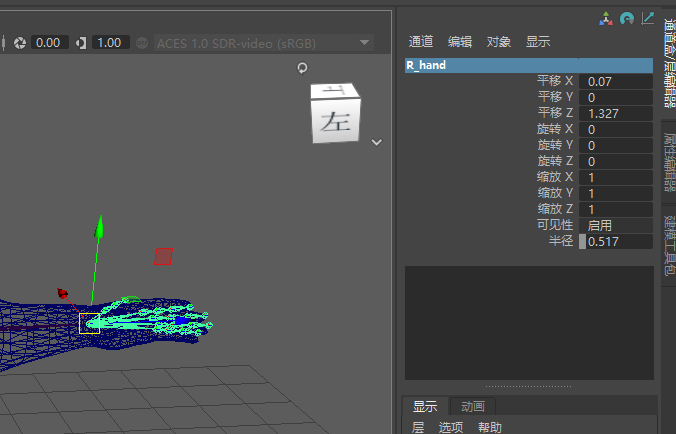
(为每一根骨骼命名)
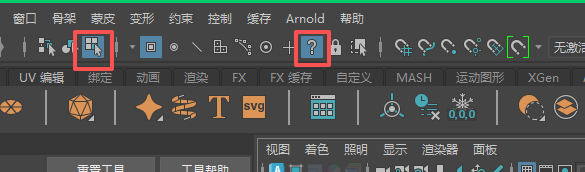
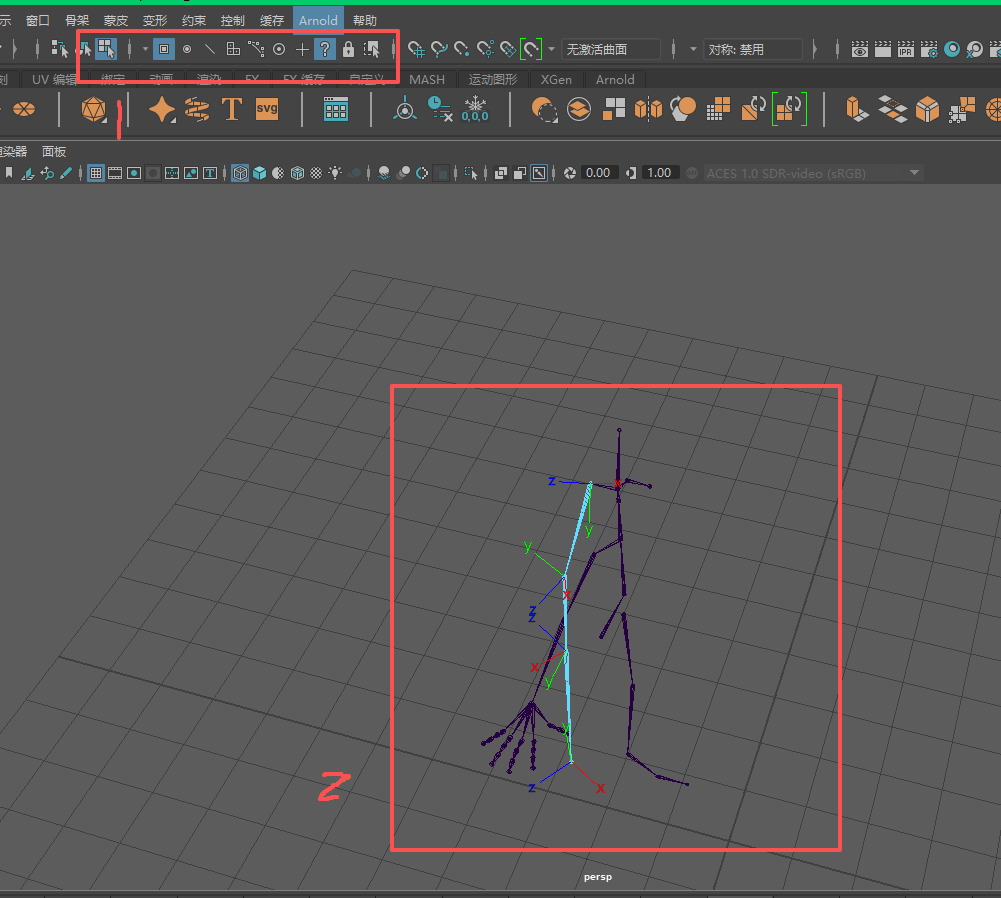
4 调整关节的坐标轴
显示关节的坐标系:把菜单栏的这两个按钮打开
把身体关掉,只留骨骼:显示--视口--取消勾选 多边形
点旋转 来修改关节坐标轴 (下面两张图是修改之前和修改之后)
测试
调好了之后,菜单栏切换回来,选择一段骨骼旋转来测试,看看这段骨骼的动作是否符合常规
再把剩下的骨骼关节坐标都调好
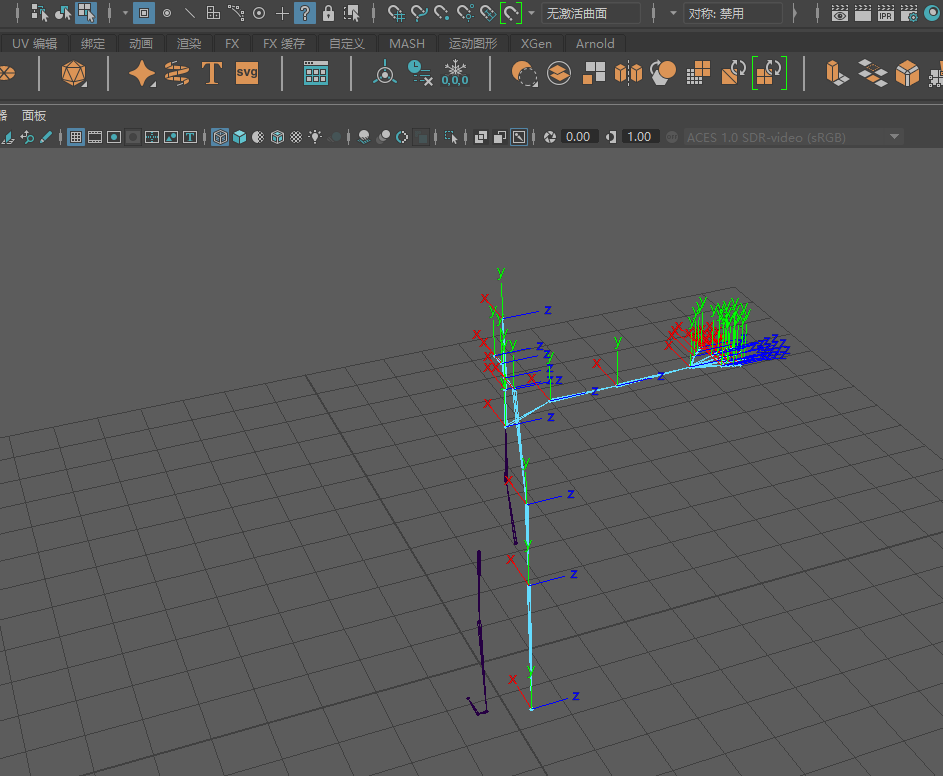
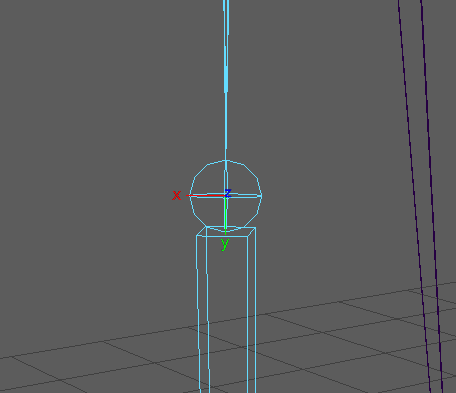
先在这个视图下选中一段骨骼
再切换按钮到下面图这样,就会出现小坐标轴了
旋转,对好坐标轴
5 镜像骨骼
显示--视口--勾选 多边形,让模型显示出来
按对象类型选择
取消勾选 选择曲面对象(这样就只能选到骨骼)
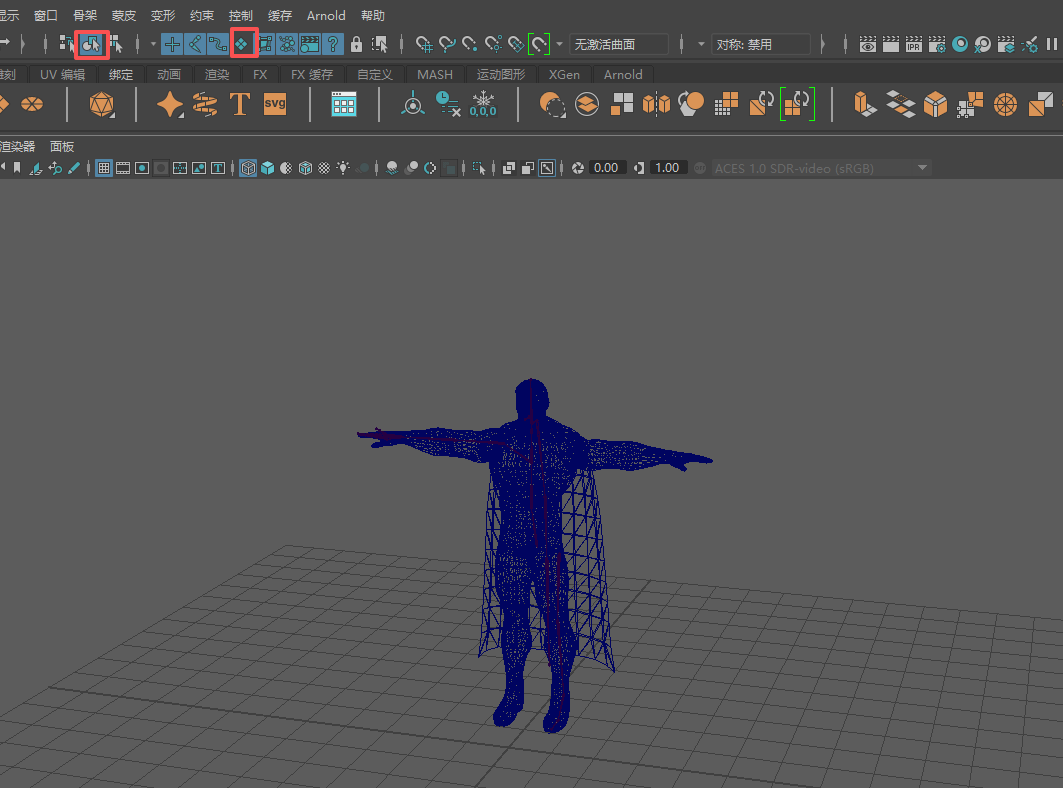
选中手部的骨骼
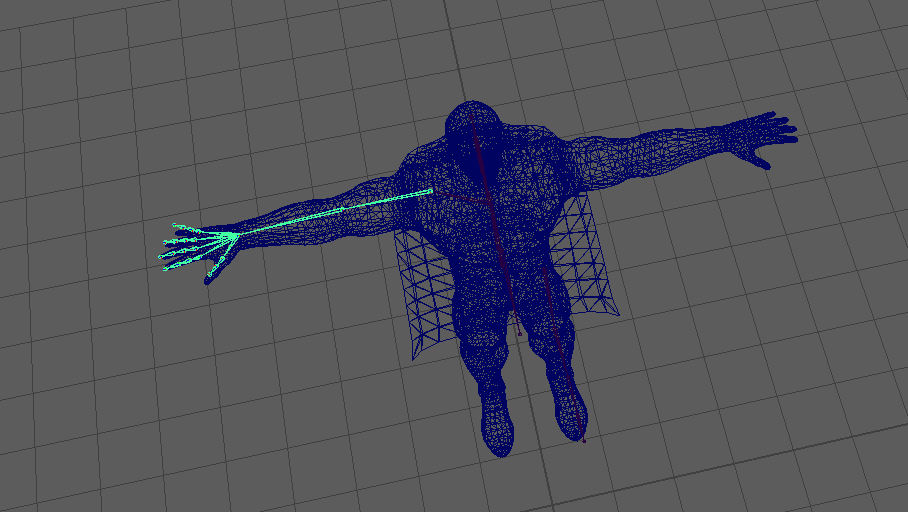
菜单栏--骨架--镜像关节 选项
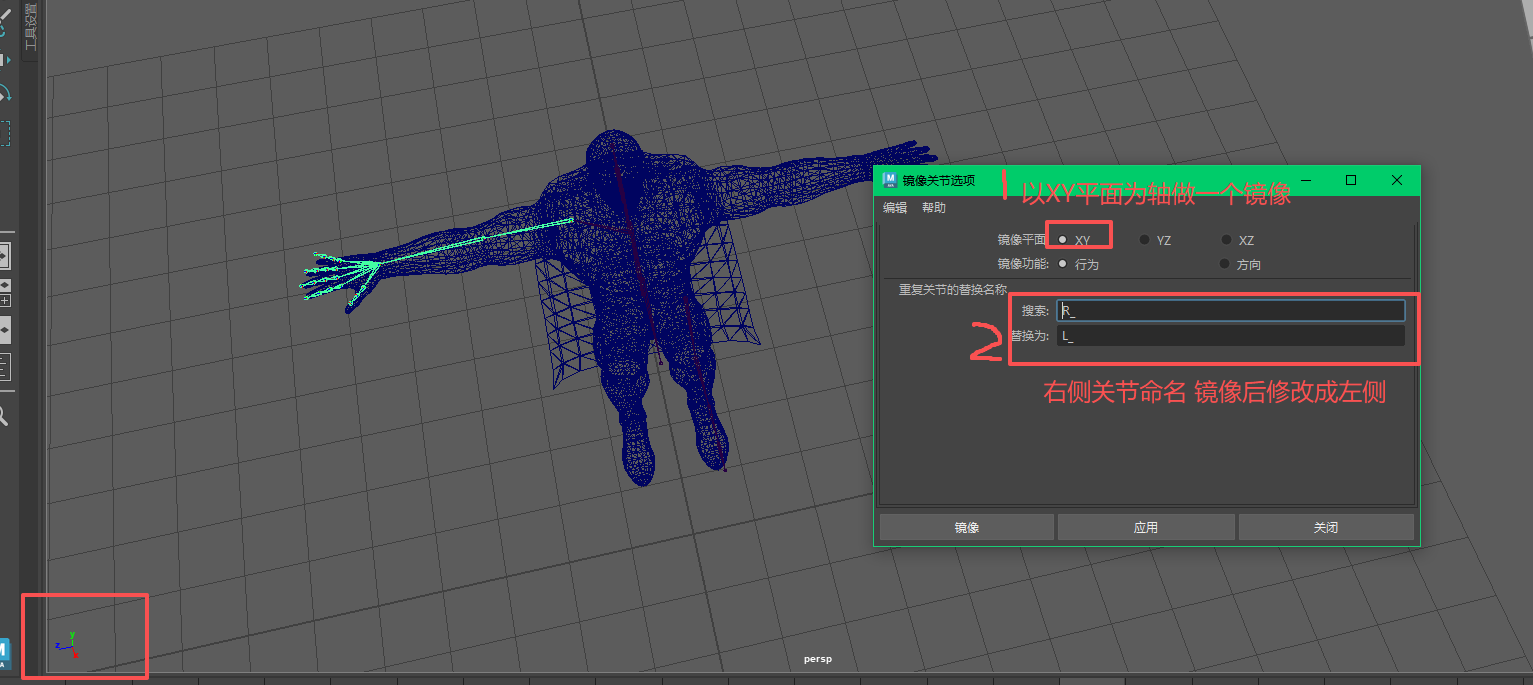
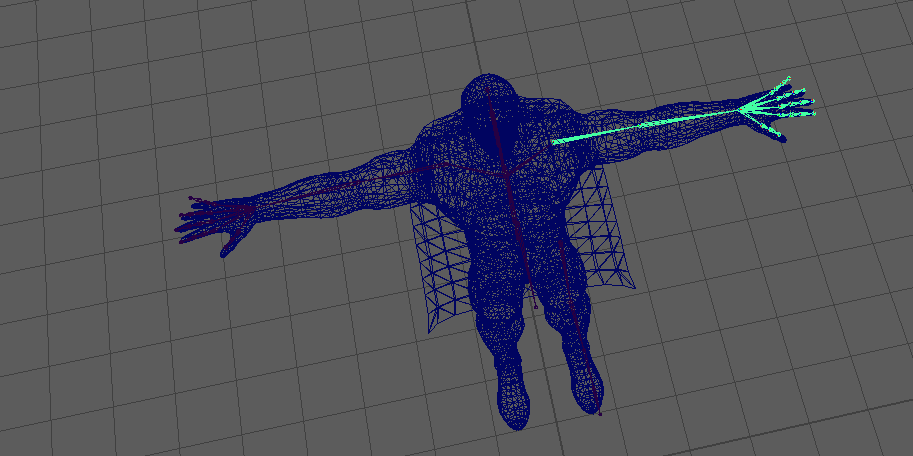
应用 关闭,就镜像好了
同样的操作,把腿部骨骼也镜像一下
腿的骨骼连接到躯干上(同时选中两段骨骼,按P)
贰 控制器
一 脚部控制 IK
1 脚部IK创建
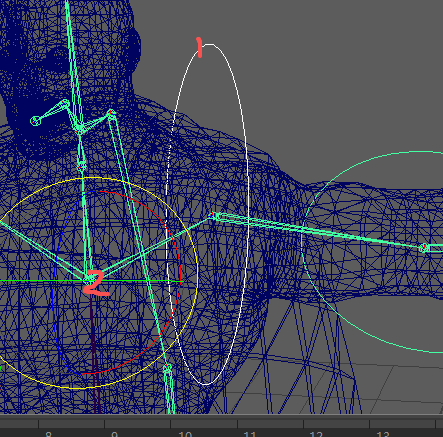
腿部IK
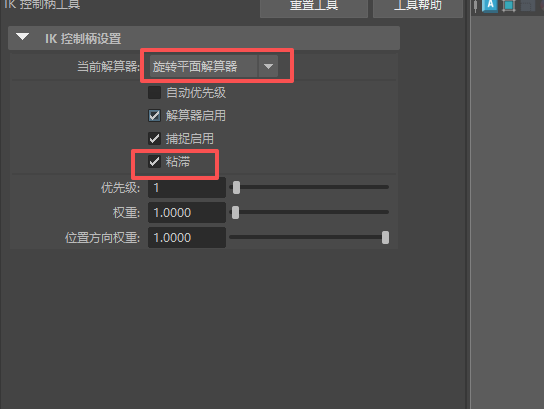
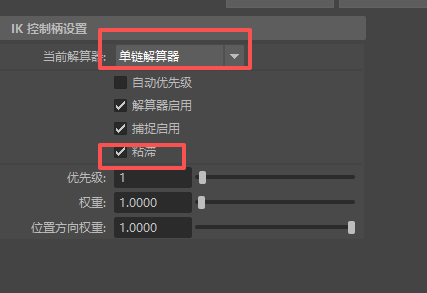
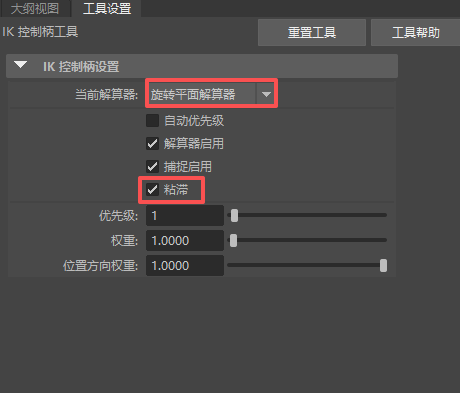
骨架--创建IK控制柄 工具设置
选 旋转平面解算器,勾选 粘滞
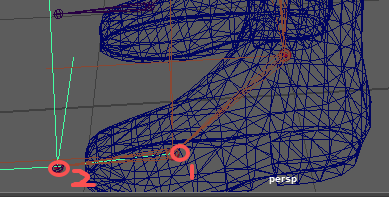
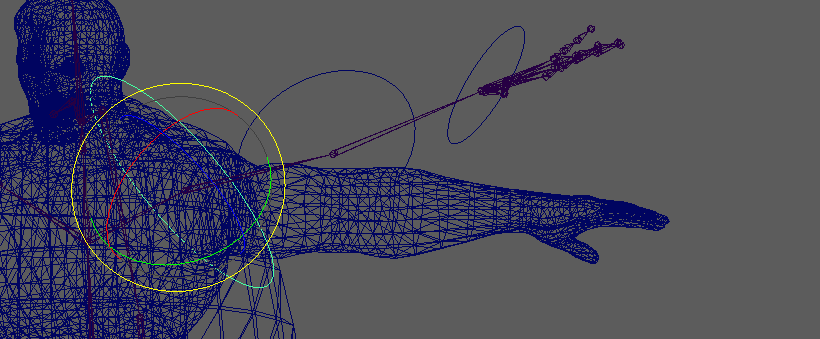
脚掌IK
脚掌IK用单链解算器 , 同样 粘滞
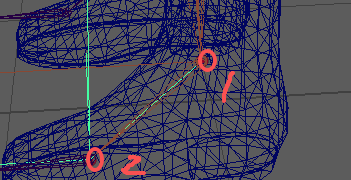
再创建一个IK
IK控制柄大小可以调整:
显示--动画--IK控制柄大小 (只是为了方便观察)
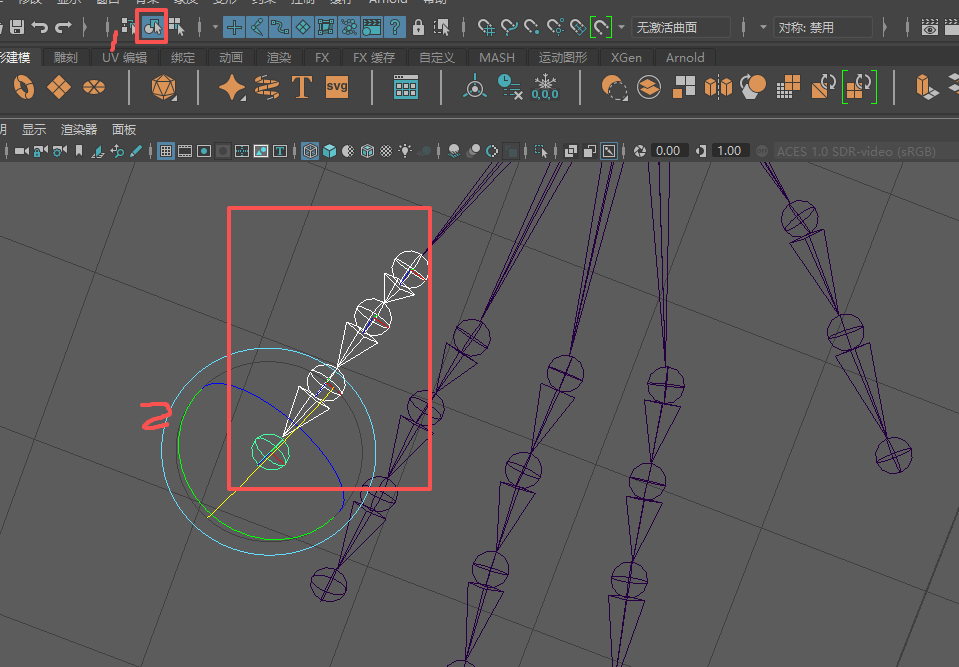
2 脚部IK打组
接下来要给脚部IK打4个组
首先说一下为什么要打组,打不同的组是为了分别对脚部做出四种控制动作
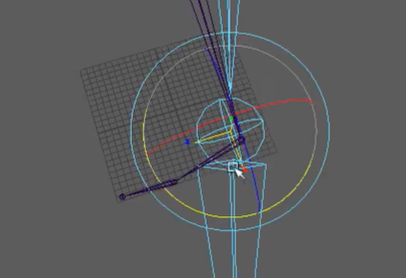
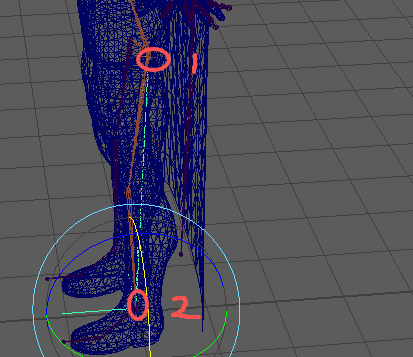
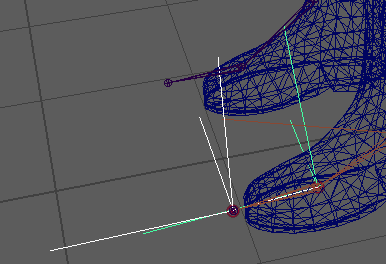
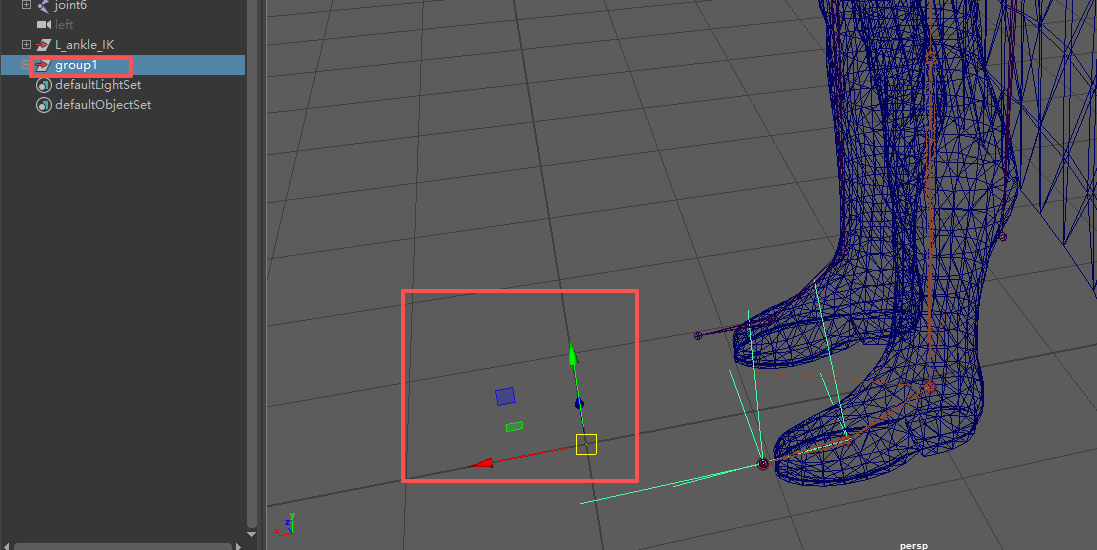
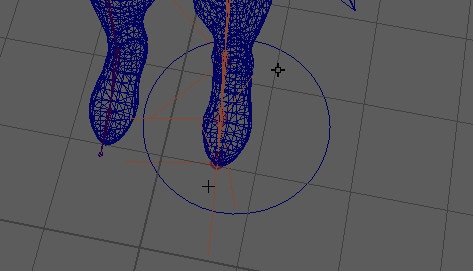
动作1:脚掌着地,抬脚后跟
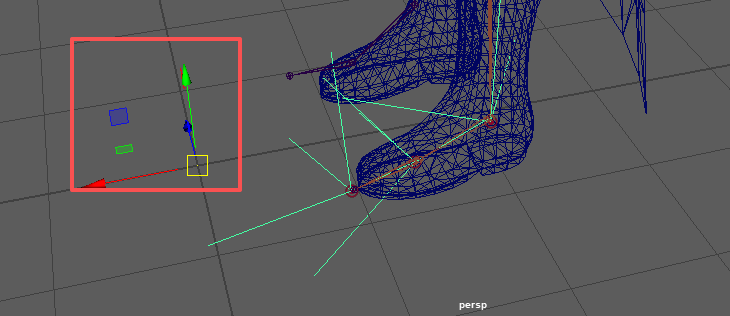
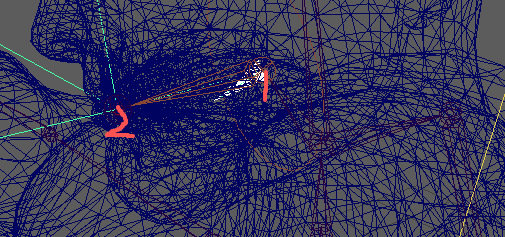
选中腿部的那个IK
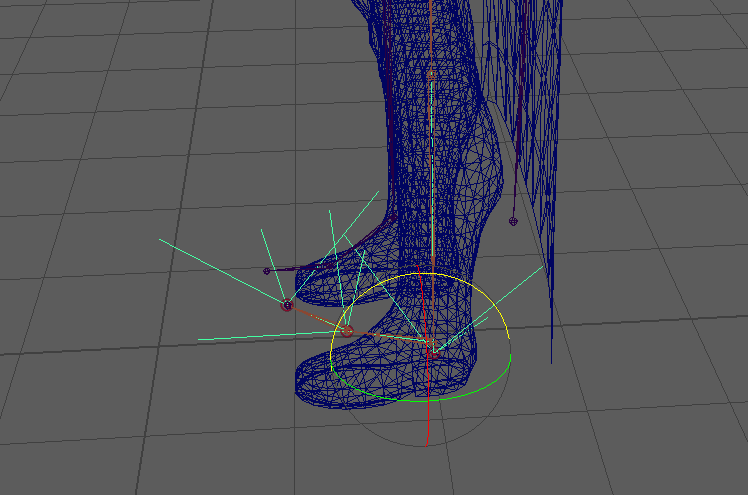
ctrl + G, 打一个组,按W会出来一个小坐标(下图红框中)
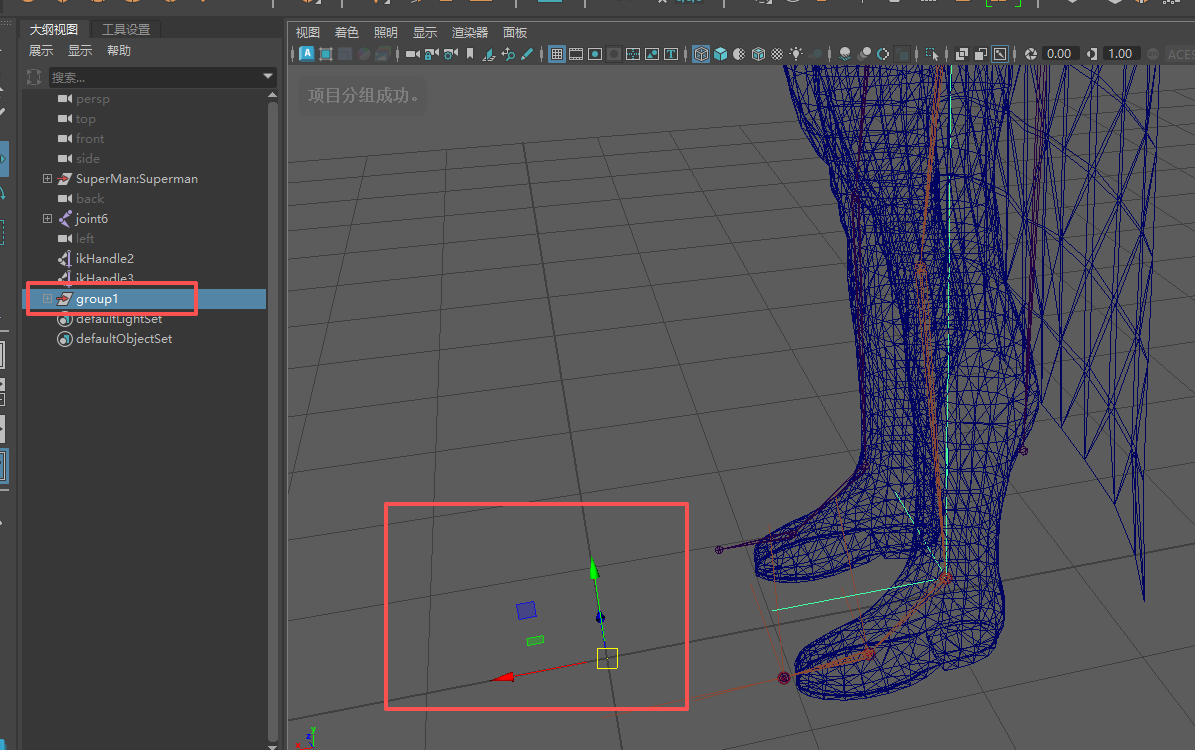
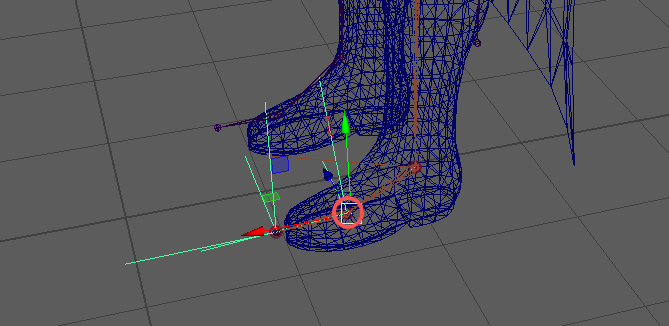
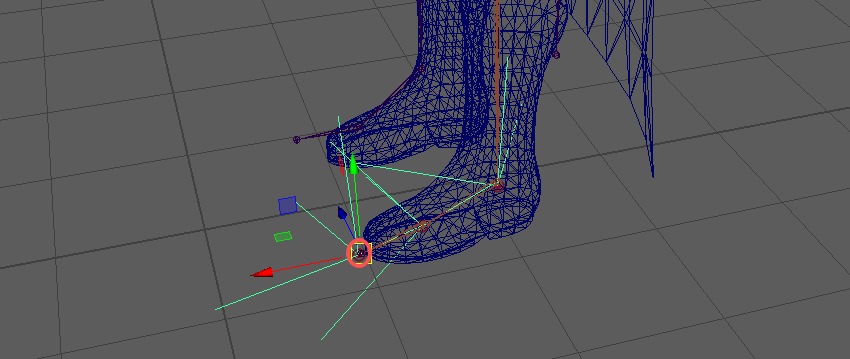
键盘上同时按住 D键和V键,键盘按住的同时,鼠标拖动刚才的小坐标到下图的圆圈处,松开鼠标
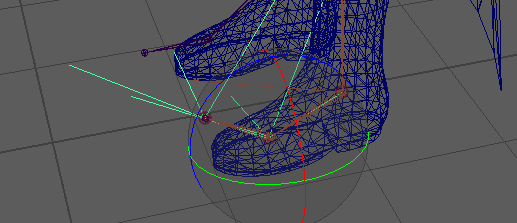
旋转 刚才的小坐标,就会发现腿部的骨骼会跟着这个坐标动,像 脚掌着地 抬脚后跟 的动作
修改刚刚的组名
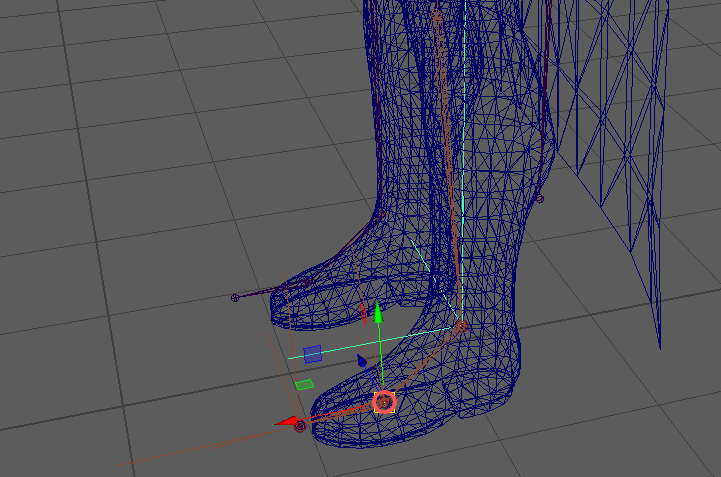
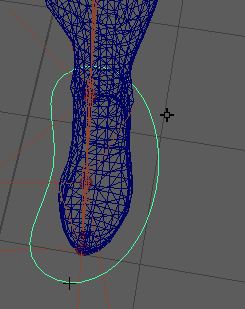
动作2:抬前脚掌
选中脚掌的这2个IK
ctrl + G打组,按W键,又出现一个小坐标
同样,键盘上同时按住 D键和V键,键盘按住的同时,鼠标拖动小坐标到 足底的中间关节处,松开鼠标
旋转刚刚的小坐标,就会发现前脚掌可以动了
修改名字
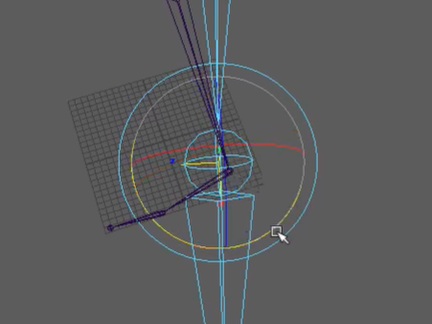
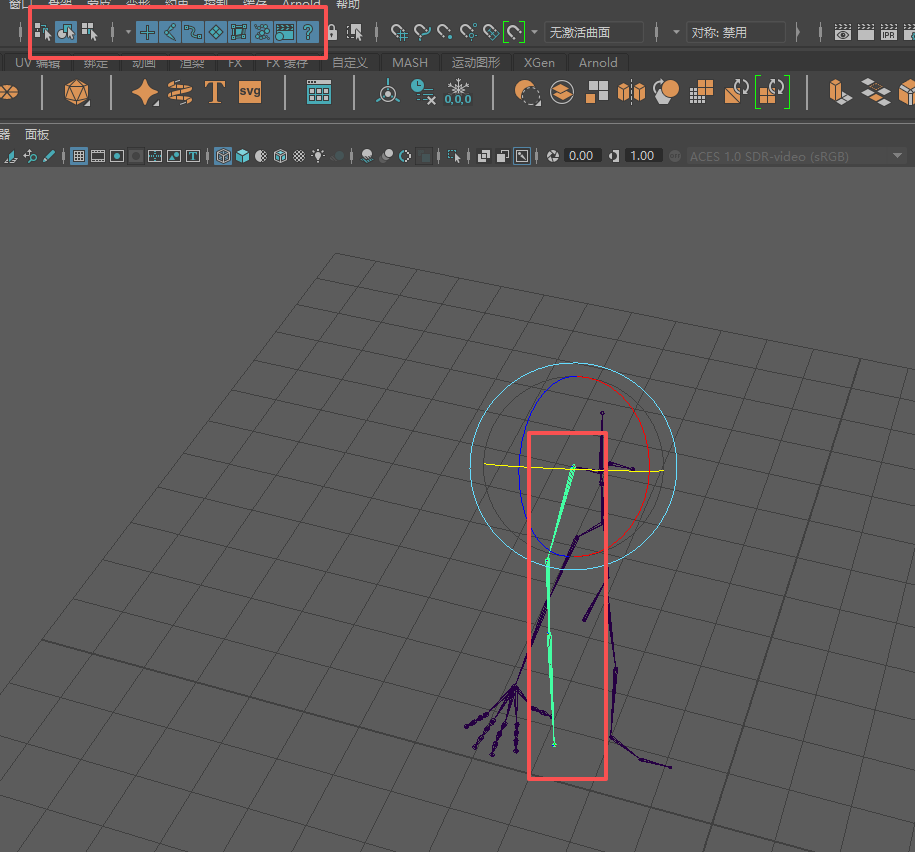
动作3:脚尖着地,抬脚后跟
选中刚才的两个组,ctrl + G 再打一个组
按W
键盘上同时按住 D键和V键,键盘按住的同时,鼠标拖动刚才的小坐标到脚尖的关节处,松开鼠标
旋转刚才的坐标轴就会出现这样 脚尖着地,抬脚后跟 的动作
修改IK手柄组的名字
动作4:抬全脚掌
选中刚刚的那个组,ctrl + G 再打一个组
按W出现小坐标轴,键盘上同时按住 D键和V键,键盘按住的同时,鼠标拖动 小坐标轴 到 脚踝 关节处,松开鼠标
旋转刚才的小坐标轴,可以出现 抬整个脚掌的动作
修改组名字
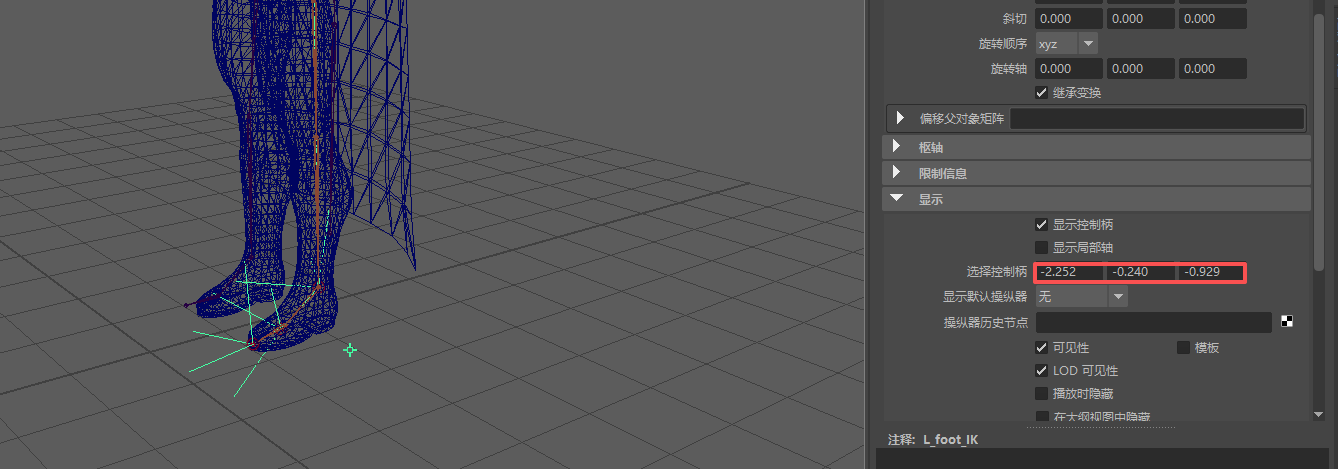
显示IK控制柄
(IK控制柄显示后,选择 控制柄 就相当于选择 大纲视图的 IK组了,相当于控制器)
选中IK组,ctrl + A 显示属性编辑器,显示里,勾选 显示控制柄
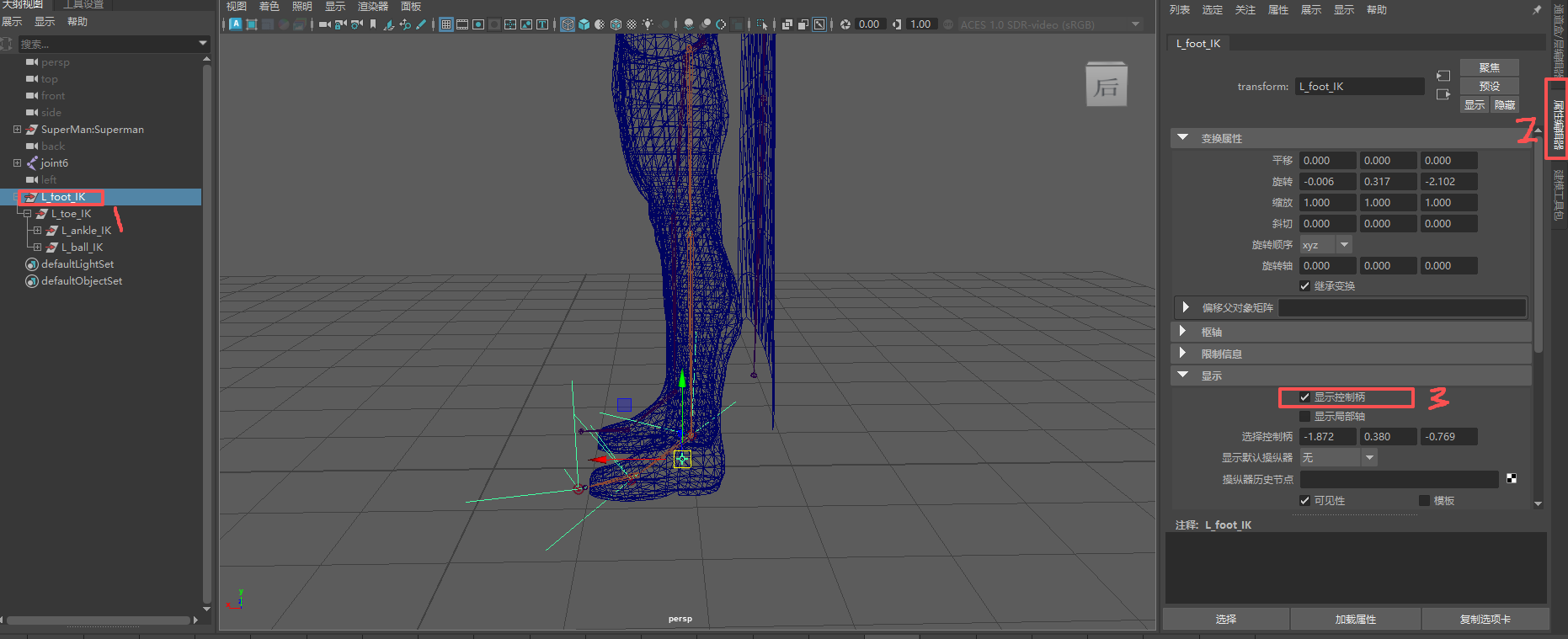
这个就是控制柄
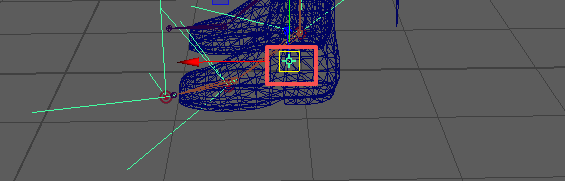
按住ctrl,鼠标放在 显示 下面 选择控制柄 框里, 左键拖动,可以改变控制柄的位置
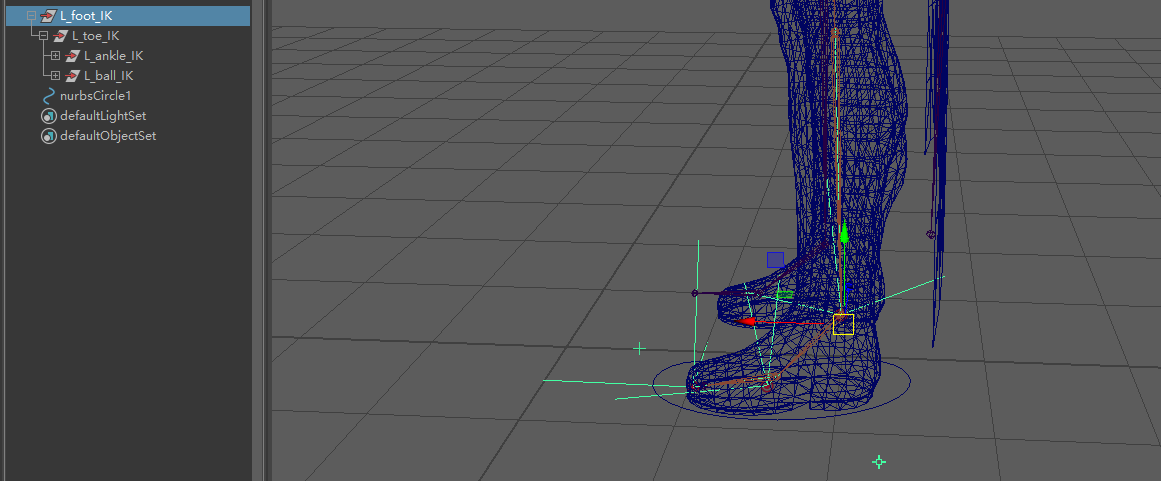
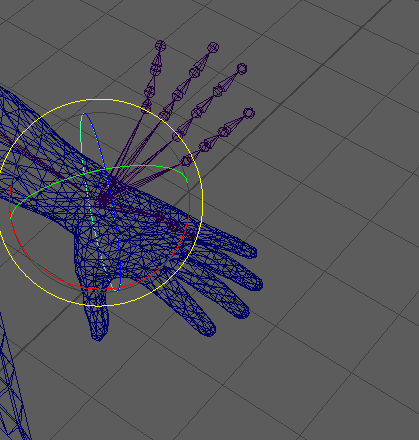
3 脚部控制器
(简单的可以 不用 控制器,用显示的IK控制柄就行)
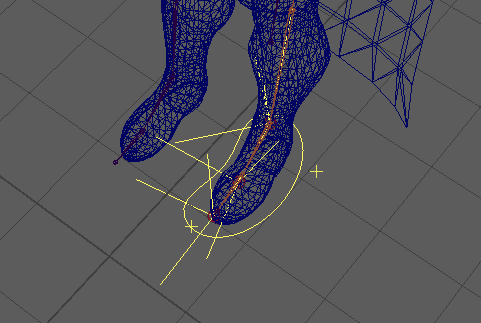
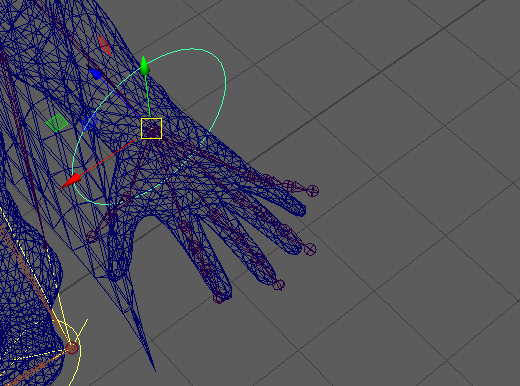
很多东西都可以用来做控制器,这里用圆形来做 控制器
创建--NURBS基本体--圆形
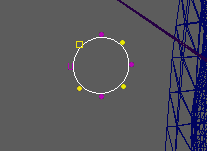
修改圆形形状
切换到 控制顶点,修改圆形形状为脚丫子形状(W)
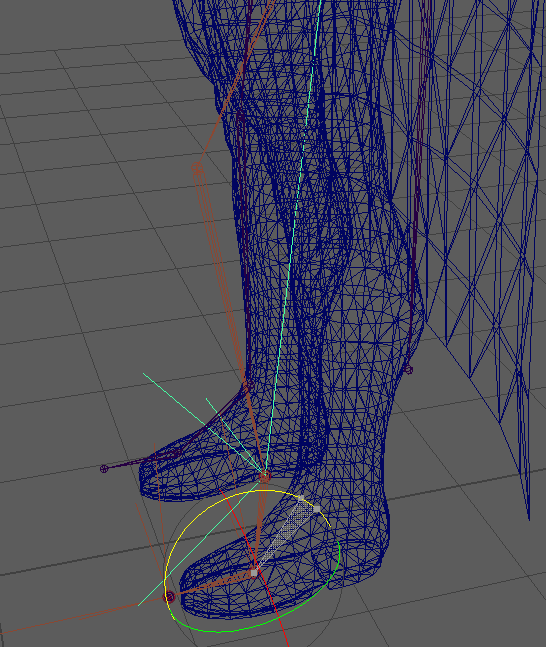
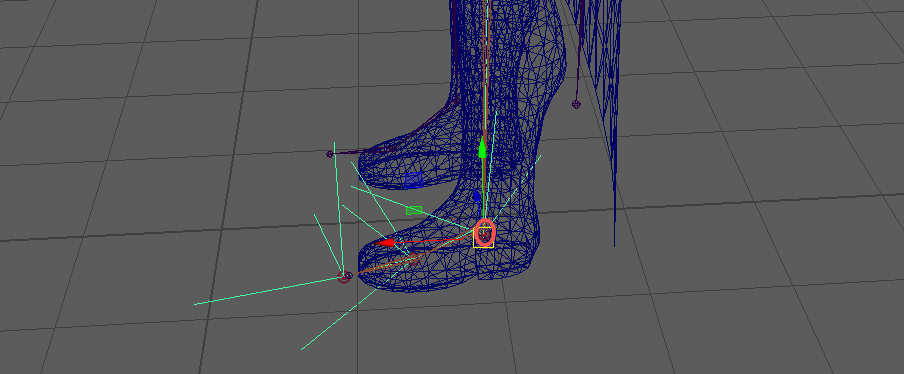
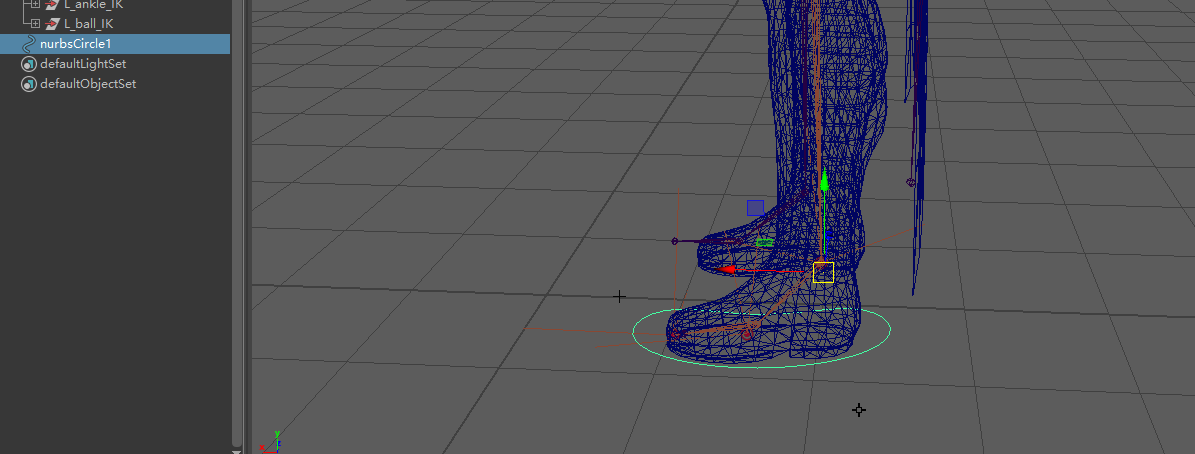
注意点1:控制器的轴心点
控制器的轴心点和 被控制东西 L_foot_IK的轴心点 对齐
(同时按住 D键和V键,且鼠标拖动圆形的轴心点 到 目标位置)
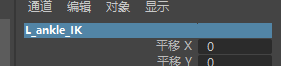
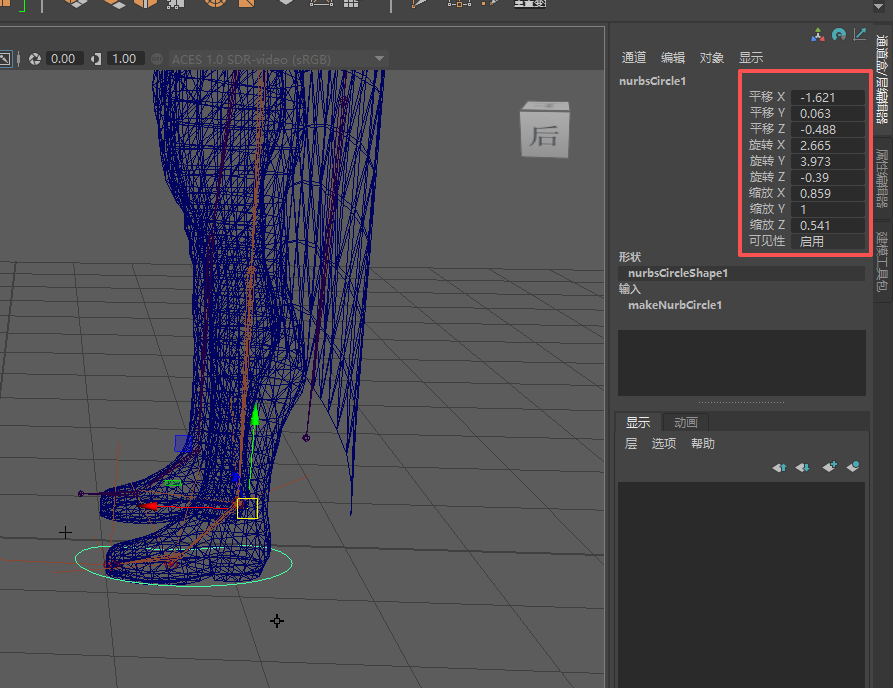
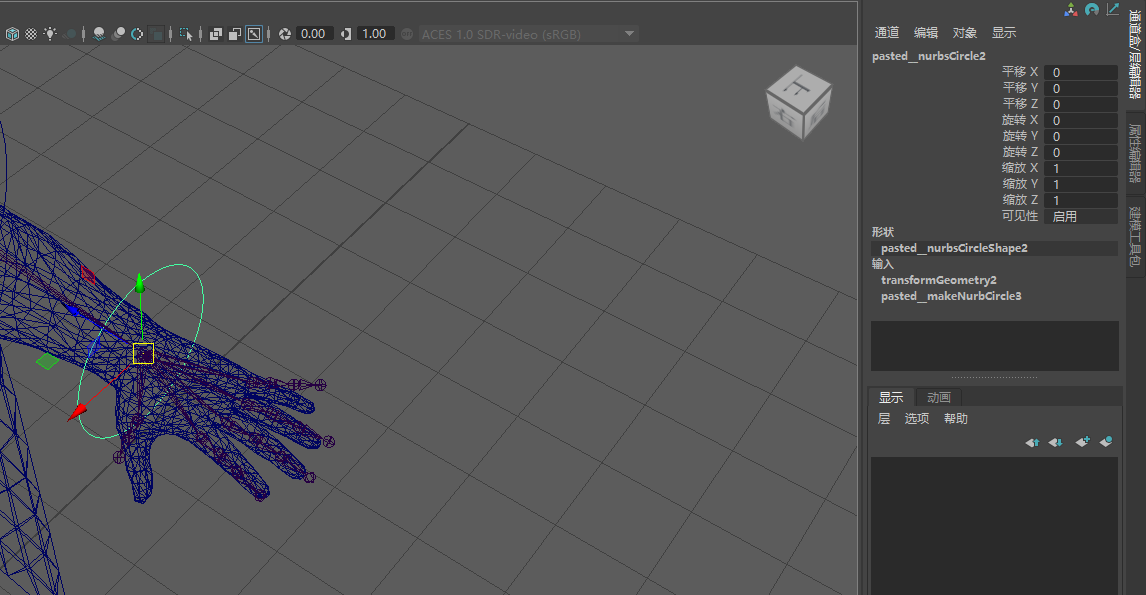
注意点2 :控制器坐标清0
即 修改--冻结变换
清0之前
修改--冻结变换 之后:
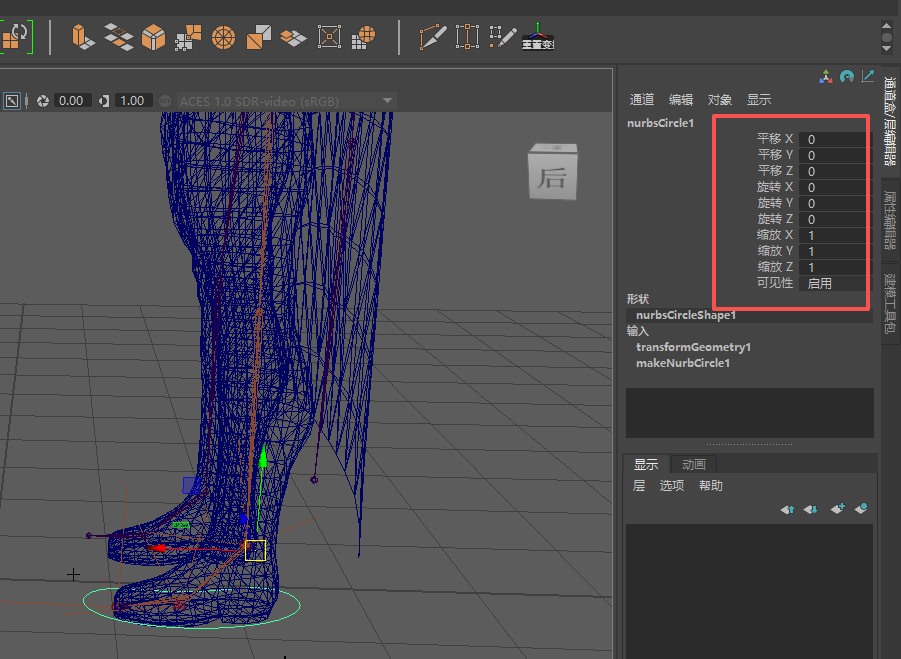
目的: 方便控制器归位
注意点3:删除历史记录
编辑--按类型删除--历史
(防止当前的历史 参与以后的动画运算)
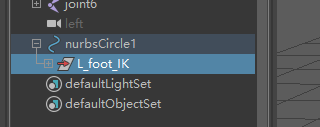
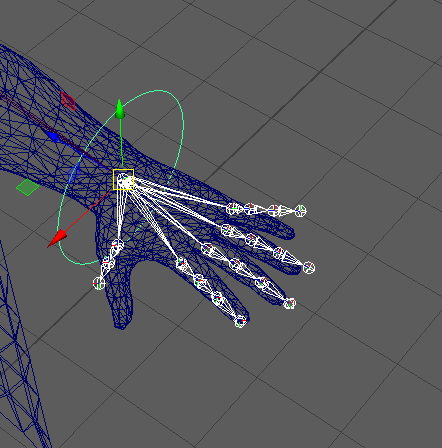
建立层级关系
先选IK组,按住shift,再选控制器,按P
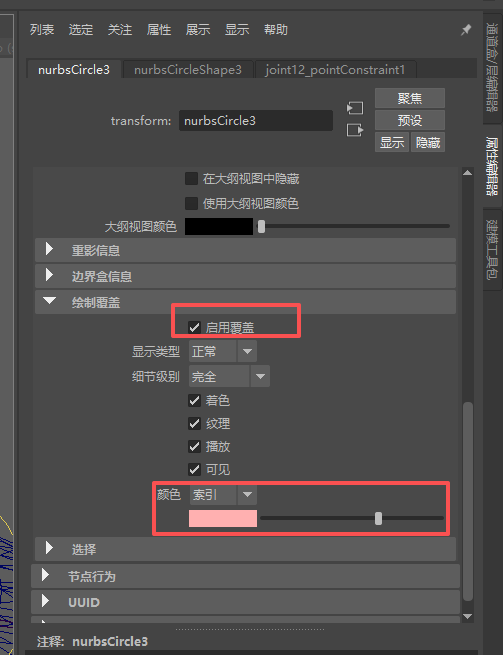
修改控制器颜色
ctrl + A:属性编辑器 -- 显示 -- 绘制覆盖 -- 勾选 启用覆盖-- 选一个颜色
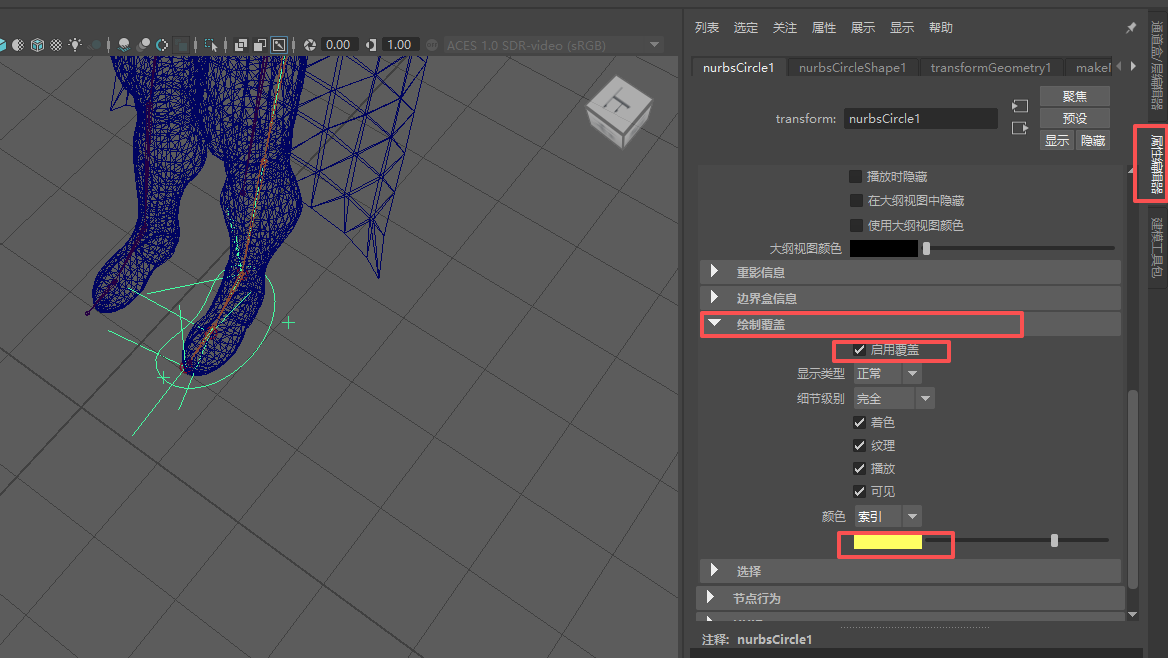
控制器变成黄色了
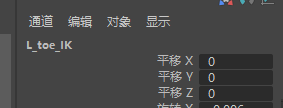
4 创建另一个脚部控制器
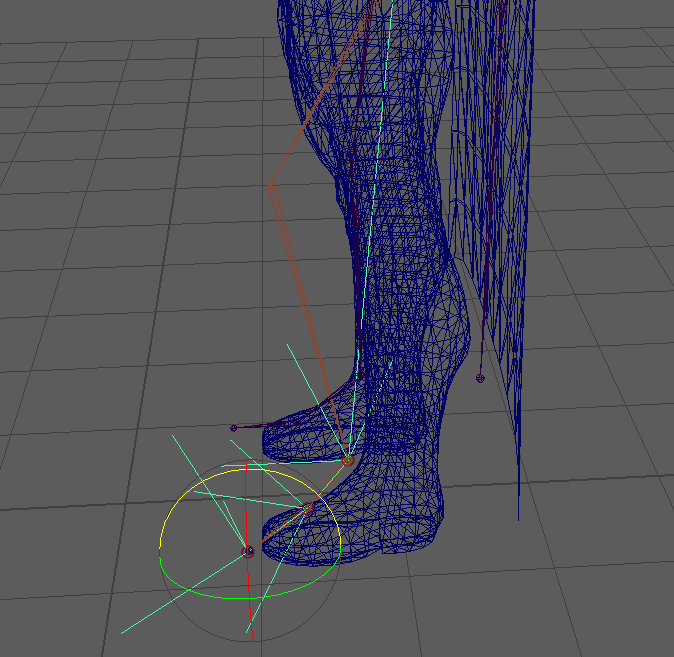
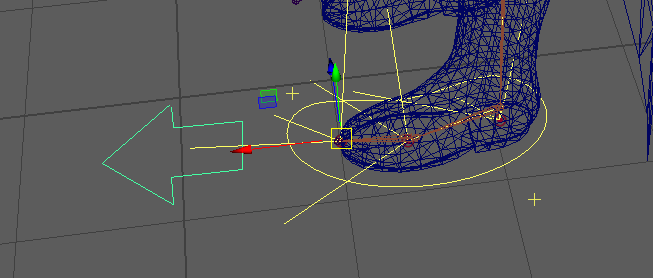
用EP曲线做一个控制器:(控制 L_toe_IK)
创建--曲线工具--ep曲线 (工具设置--曲线次数:1线性 画出来的是直线)
按住X画
修改--使枢轴居中
步骤1 控制器的轴心点和 被控制东西 的轴心点 对齐 (键盘上同时按住 D键和V键 + 鼠标拖动)
步骤2 修改--冻结变换 (控制器坐标 清0) → 方便控制器归位
步骤3 编辑--按类型删除--历史 (防止当前的历史 参与以后的动画运算)
步骤4 先选控制器,再选 L_toe_IK,约束--方向约束,添加
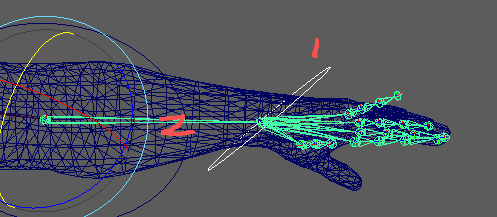
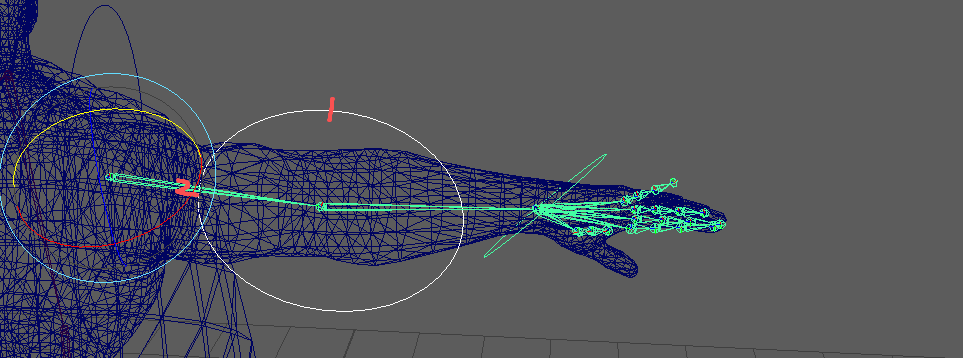
二 手部控制 FK
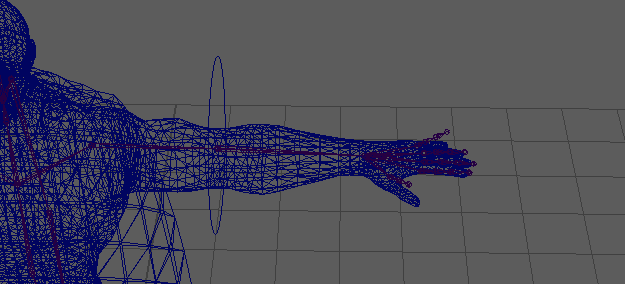
手臂控制器FK
创建一个圆形,ctrl + G 给圆环打一个组

把圆环旋转90度,放在垂直于手臂的位置
再复制2个圆环,放在合适的位置
按V键同时拖动鼠标,把3个圆环的中心点和关节点对齐
把圆环冻结变换
先选骨骼,再选圆环
约束--方向 选项,取消勾选 保持偏移 , 添加
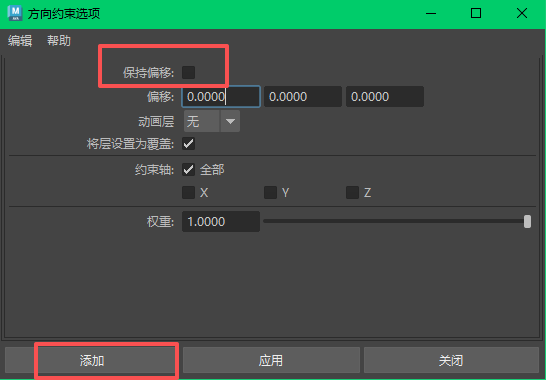
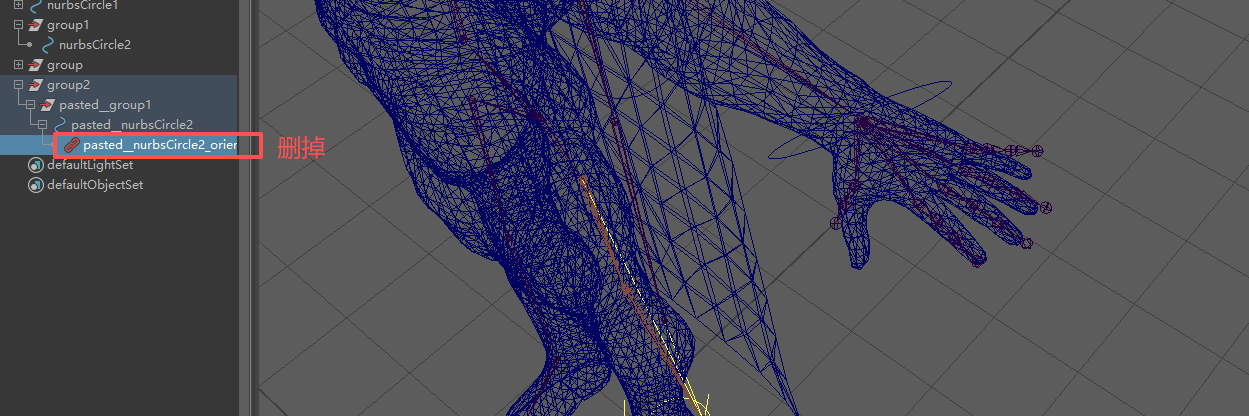
再把约束删除 (做这个约束就是为了把圆环和手臂关节对齐方向)
先选圆环,再选骨骼,约束--方向
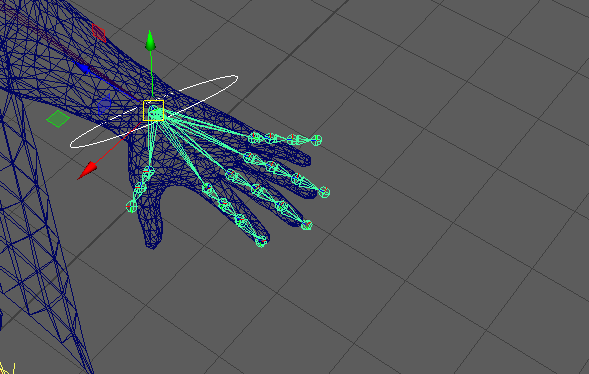
测试一下,旋转圆环,可以摆动手腕
剩下的两个圆环重复以下操作:
按V键同时拖动鼠标,把圆环的中心点和关节点对齐
把圆环冻结变换
先选骨骼,再选圆环,约束--方向 选项 ,取消勾选 保持偏移,添加
再把约束删除 (做这个约束就是为了把圆环和手臂关节对齐方向)
先选圆环,再选骨骼,约束--方向
重命名组
建立父子关系
先选中手腕的圆环,再选中小臂的骨骼,按P,做父子绑定
先选中手肘部的圆环,再选中大臂的骨骼,按P,做父子绑定
先选中大臂的圆环,再选中胸骨的骨骼,按P,做父子绑定
绑定以后 ,测试一下控制效果,旋转大臂的圆环
手指控制 (略)
添加属性
设置驱动关键帧
三 脊柱控制器 FK(略)
FK 控制器
勾选 保持偏移
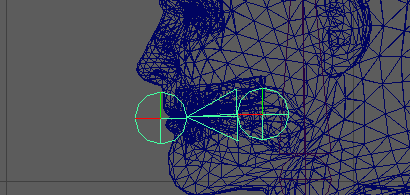
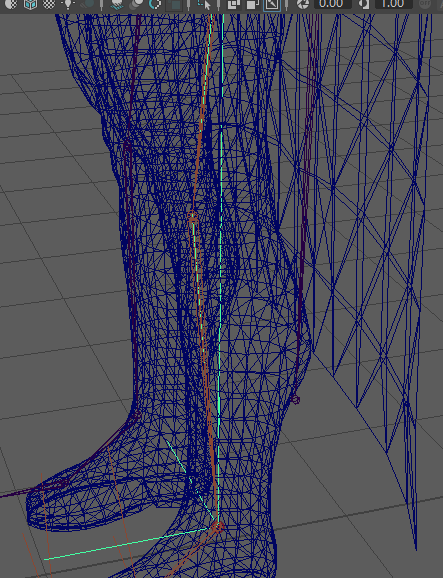
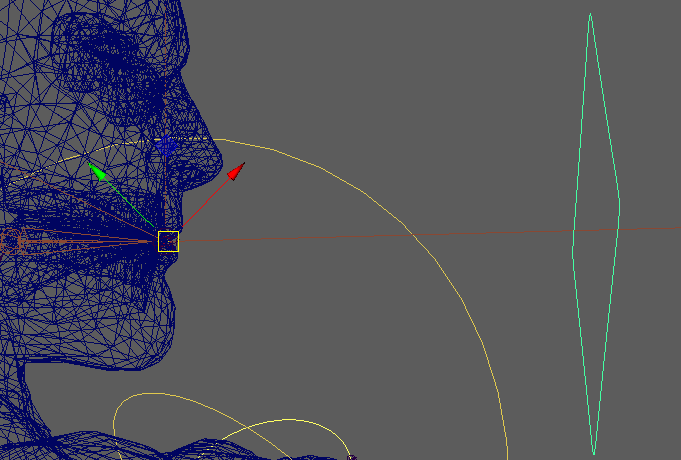
四 下颚(嘴部)控制器 IK
切换到绑定模块

骨架--创建IK控制柄 工具设置
选 旋转平面解算器,勾选 粘滞
鼠标点击图片中1、2关节位置
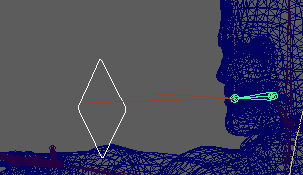
创建一个圆形 作为 控制器
把圆环旋转90度
现在修改一下控制器的形状 为方块
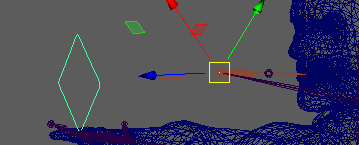
控制顶点,选择模式 同时选择黄色这4个点
切换到旋转,转一下
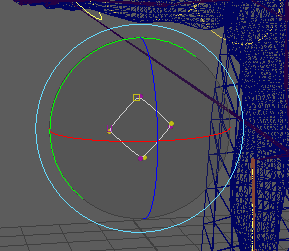
放在合适的位置
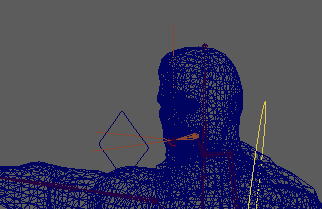
步骤1 控制器的轴心点和 被控制东西 的轴心点 对齐 (键盘上同时按住 D键和V键 + 鼠标拖动)
步骤2 修改--冻结变换 (控制器坐标 清0) → 方便控制器归位
步骤3 编辑--按类型删除--历史 (防止当前的历史 参与以后的动画运算)
先选方块,再选嘴里面的骨骼,约束 -- 点
测试一下
ctrl + A , 修改一下控制器的颜色
最后,嘴部控制器 和 头部骨骼 做父子绑定
五 披风 FK(略)
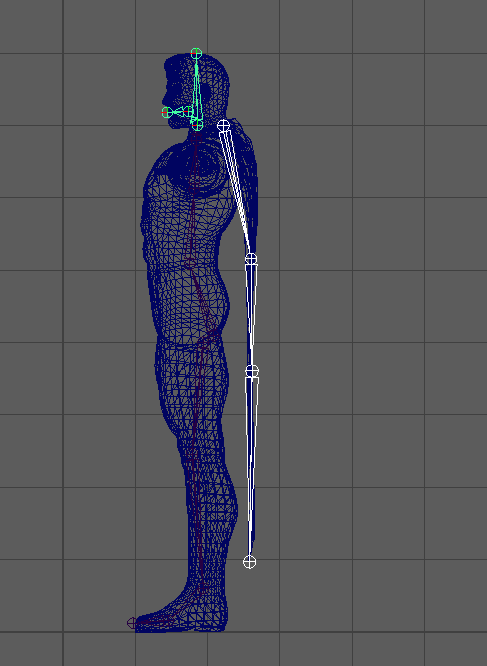
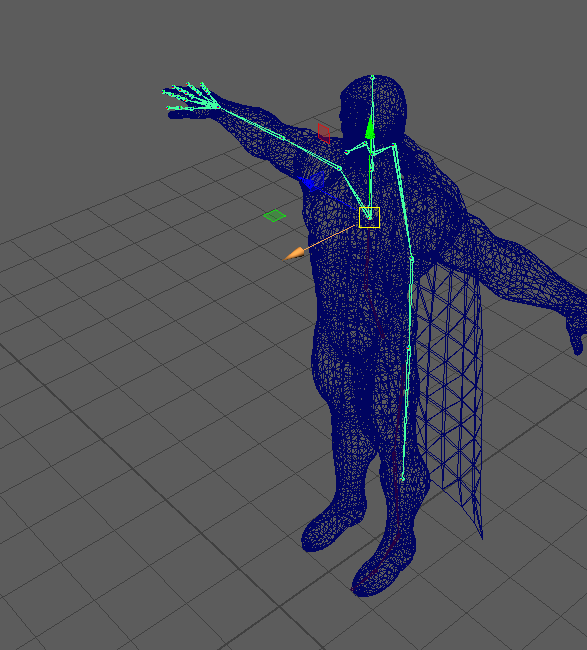
六 全局控制器
父子关系连接 P
叁 烘焙动画和导出
一 整理通道栏
用不到的属性 锁定并隐藏
显示隐藏的属性:
通道盒:编辑--通道控制
二 蒙皮绑定、蒙皮权重
IK手柄:
可见性改成0
1 绑定骨骼和蒙皮
同时选中骨骼和模型
菜单栏--蒙皮--绑定蒙皮
注意:蒙皮时,不要选择控制器
取消绑定蒙皮:
蒙皮--取消绑定蒙皮
2 蒙皮权重
方法1 窗口--常规编辑器--组件编辑器--平滑蒙皮 (调整总体)
方法2 蒙皮--绘制蒙皮权重 (调整细节)
不透明度 和 值 相乘 是最终的值
绘制操作为 添加时:
修改值 重复刷,值还是那个值
修改不透明度,重复刷 权重会越来越大 → 用于快速增加某个关节的影响
按键B :控制笔刷大小
刷权重的时候可以按住鼠标左键向上滑
(给人物不停地摆pose,不停地刷权重)
绘制操作:
添加:每画一笔都增加
缩放:每画一笔都 乘以现有的权重
替换
平滑:把附近的权重做一个中和处理
镜像蒙皮权重
蒙皮--镜像蒙皮权重
三 建立角色组
控制--创建角色集 选项--起个名字(记录所有的关键帧)
右下角--选中角色
选控制器,全选属性,控制--添加到角色集
G键 执行上一步操作
四 制作动画
1 脚部 手部 姿势
摆好一个姿势--添加关键帧
...
第一帧粘贴到最后一帧(最后一帧要和第一帧一样)
2 腰部动作
动画层
新建一个动画层,选中控制器,在动画层上右键--添加选定对象
打上各个关键帧
在每个关键帧修改姿势
3 头部动作
再新建一个动画层,选中控制器,在动画层上右键--添加选定对象
打上各个关键帧
在每个关键帧修改姿势
备注:动画层下面可以修改权重,可以把其他动画层关掉
...
五 烘焙动画到骨骼
1 烘焙动画到骨骼
选中根骨骼,鼠标右键单击--选择层级
编辑--关键帧--烘焙模拟 选项
编辑--重置设置
勾选 开始/结束
结束时间:写帧数 数字
烘焙
检查动画完好
2 删掉控制器
把根骨骼上层的控制器 解绑:shift + p
把控制器删掉
六 导出
文件--导出全部 选项 --文件类型:FBX export
导出全部 起个名字
或者 选择所有的骨骼和模型,文件--导出当前选择--文件类型:FBX export
导出当前选择


:综合项目实战:Java 前后端分离架构部署)
)


:多重共线性)

)










)