本算法复现了 RoboDK 的机器人校准功能:在训练集的理论校准后精度与 RoboDK 一致,在测试集的实测精度接近 Staubli 原厂。
参考:RoboDK 机器人校准功能(https://robodk.com.cn/cn/robot-calibration)
特性
- 支持 SDH 参数子集选择(每关节
α/a/θ/d可独立选择是否参与校准)。 - Base→World 与 Tool→Flange 外参与 DH 参数 联合估计。
- 残差为 TCP 三维位置(mm),输出统计与直方图对比。
- 提供共垂线求解与可视化脚本,便于复核过程。
术语说明
-
训练集(Training set):用于本算法与 RoboDK 共同辨识几何参数,包含 优化后 DH 参数、基座到世界坐标系位姿
T_base^world与 TCP 到法兰位姿T_tcp^flange。由 3 个步骤的数据组成:- 基座坐标系构建:26 组关节序列;
- TCP 构建:27 组关节序列;
- DH 校准与坐标系优化:≥60 组关节序列。
-
测试集(Test set):在将辨识结果写入控制器后,用 ≥40 组 笛卡尔 TCP 位姿 验证机械臂的绝对定位精度。
-
执行方式:训练集与测试集均被转换为 Staubli VAL3 离线程序以驱动机器人(本工程不提供相应 VAL3 程序)。
-
理论数值计算:以预设关节值经正向运动学求得
T_flange^base,再经坐标变换得到T_tcp^world,与测量值作差得到位置残差。
给定关节角 J\mathbf{J}J 与前向运动学公式:
校准前(缺省 SDH)
Ttcpworld=Tbaseworld⋅Tflangebase(J)(默认 SDH)⋅Ttcpflange\;\mathbf T_{\text{tcp}}^{\text{world}}\;=\;\mathbf T_{\text{base}}^{\text{world}}\;\cdot\;\underset{\text{(默认 SDH)}}{\mathbf T_{\text{flange}}^{\text{base}}(\mathbf J)}\;\cdot\;\mathbf T_{\text{tcp}}^{\text{flange}}\;Ttcpworld=Tbaseworld⋅(默认 SDH)Tflangebase(J)⋅Ttcpflange
校准后(优化 SDH)
Ttcpworld′=Tbaseworld′⋅Tflangebase′(J)(优化 SDH)⋅Ttcpflange′\;{\mathbf T_{\text{tcp}}^{\text{world}}}'\;=\;{\mathbf T_{\text{base}}^{\text{world}}}'\;\cdot\;\underset{\text{(优化 SDH)}}{{\mathbf T_{\text{flange}}^{\text{base}}}'(\mathbf J)}\;\cdot\;{\mathbf T_{\text{tcp}}^{\text{flange}}}'\;Ttcpworld′=Tbaseworld′⋅(优化 SDH)Tflangebase′(J)⋅Ttcpflange′
校准效果
实验对象:TX2-90L 机械臂
机械臂简介与原厂精度

数据来源:robodk.com/robot/Staubli/TX2-90L

Staubli 原厂绝对定位精度:全工作空间 mean 0.07 mm、90%max 0.11 mm;在 508×508×508 mm 立方体子域内 mean 0.05 mm、90%max 0.08 mm。
数据来源:代码的工作路径/doc/TX2-90L/AbsoluteCalibrationQualityReport_TX2-90L.pdf
校准对比与结论
绝对定位精度图示(单位:mm)
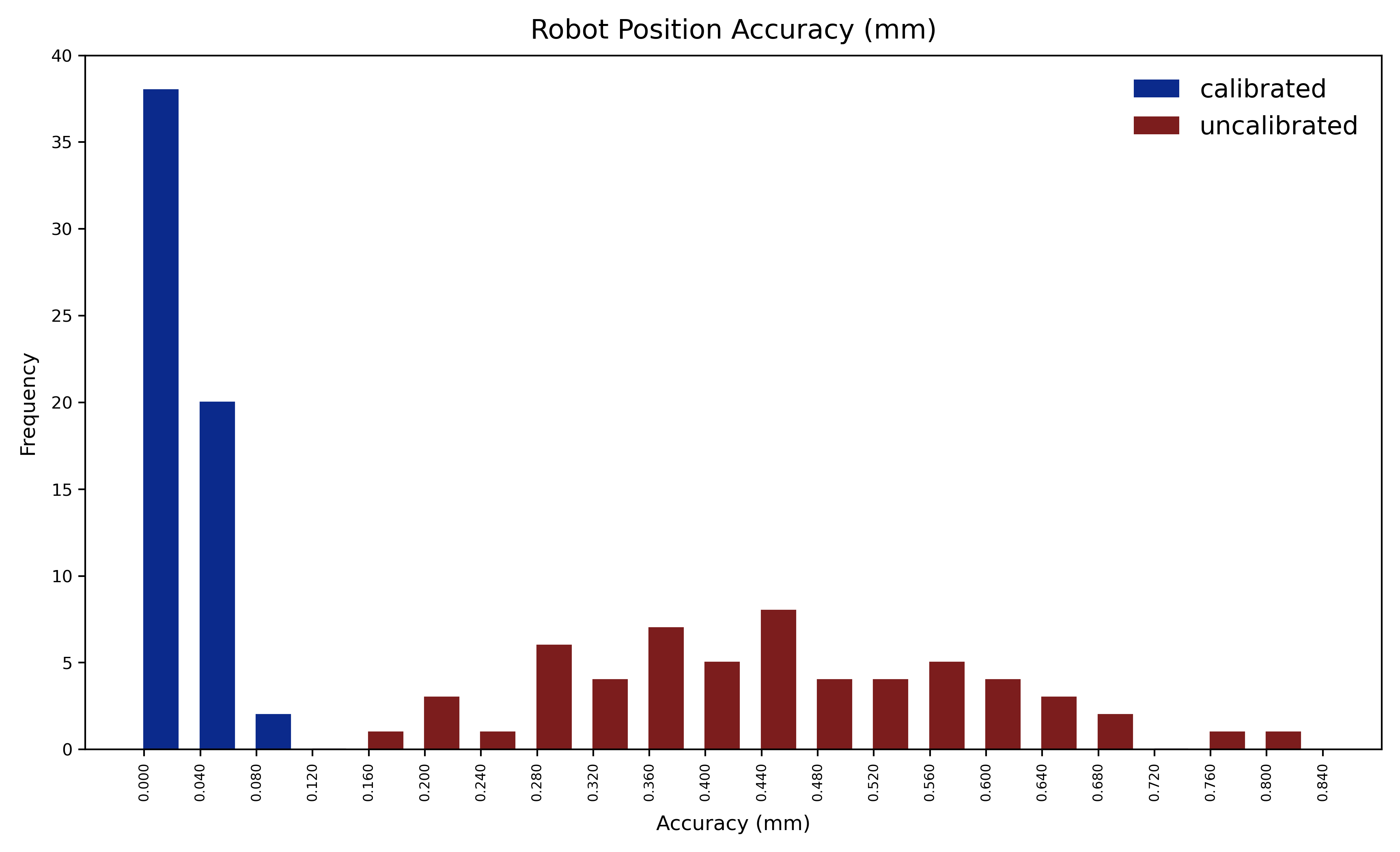
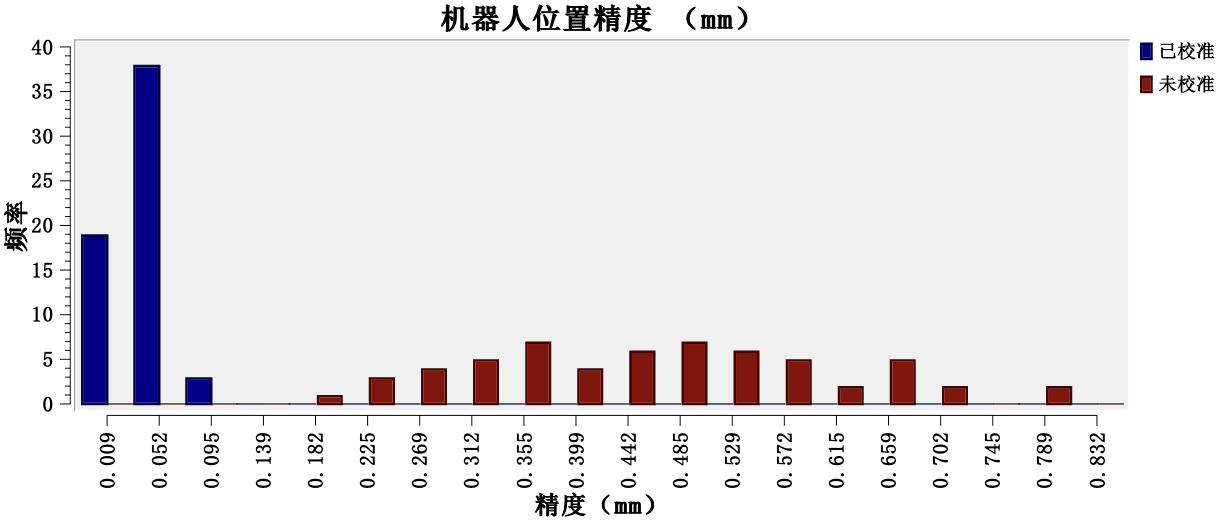
绝对定位精度数据(单位:mm)
相同颜色为对比项。
| 算法 | 数据集 | 校准状态 | mean | max | 90%max | σ | 6σ | num of points |
|---|---|---|---|---|---|---|---|---|
| 本算法 | 训练集 | 校准前(理论数值) | 0.466283 | 0.874976 | 0.647841 | 0.152851 | 0.917108 | 60 |
| 训练集 | 校准后(理论数值) | 0.039163 | 0.098429 | 0.062382 | 0.017692 | 0.106153 | 60 | |
| 测试集 | 校准后(实际测量) | 0.0509466 | 0.1020001 | 0.0838984 | — | — | 40 | |
| RoboDK | 训练集 | 校准前(理论数值) | 0.466 | 0.875 | — | 0.154 | 0.929 | 60 |
| 训练集 | 校准后(理论数值) | 0.039 | 0.098 | — | 0.018 | 0.093 | 60 |
原始数据与报表见
代码的工作路径/RobotCalib/doc/TX2-90L/与代码的工作路径/RobotCalib/results/TX2-90L/。
要点:
- 与 RoboDK 在同一训练集上的理论结果一致量级。
- 写入控制器后的实测精度位于 Staubli 原厂报告立方体子域水平附近。
- 测试集位姿分布与训练集不同,误差略有上浮,符合预期。
实验对象:TX200 机械臂
机械臂简介与原厂精度

数据来源:robodk.com/robot/Staubli/TX200

Staubli 原厂绝对定位精度:全工作空间 mean 0.17 mm、90%max 0.26 mm;在 847×847×847 mm 立方体子域内 mean 0.13 mm、90%max 0.18 mm。
数据来源:代码的工作路径/doc/TX200/AbsoluteCalibrationQualityReport_TX200.pdf
校准对比与结论
绝对定位精度图示(单位:mm)
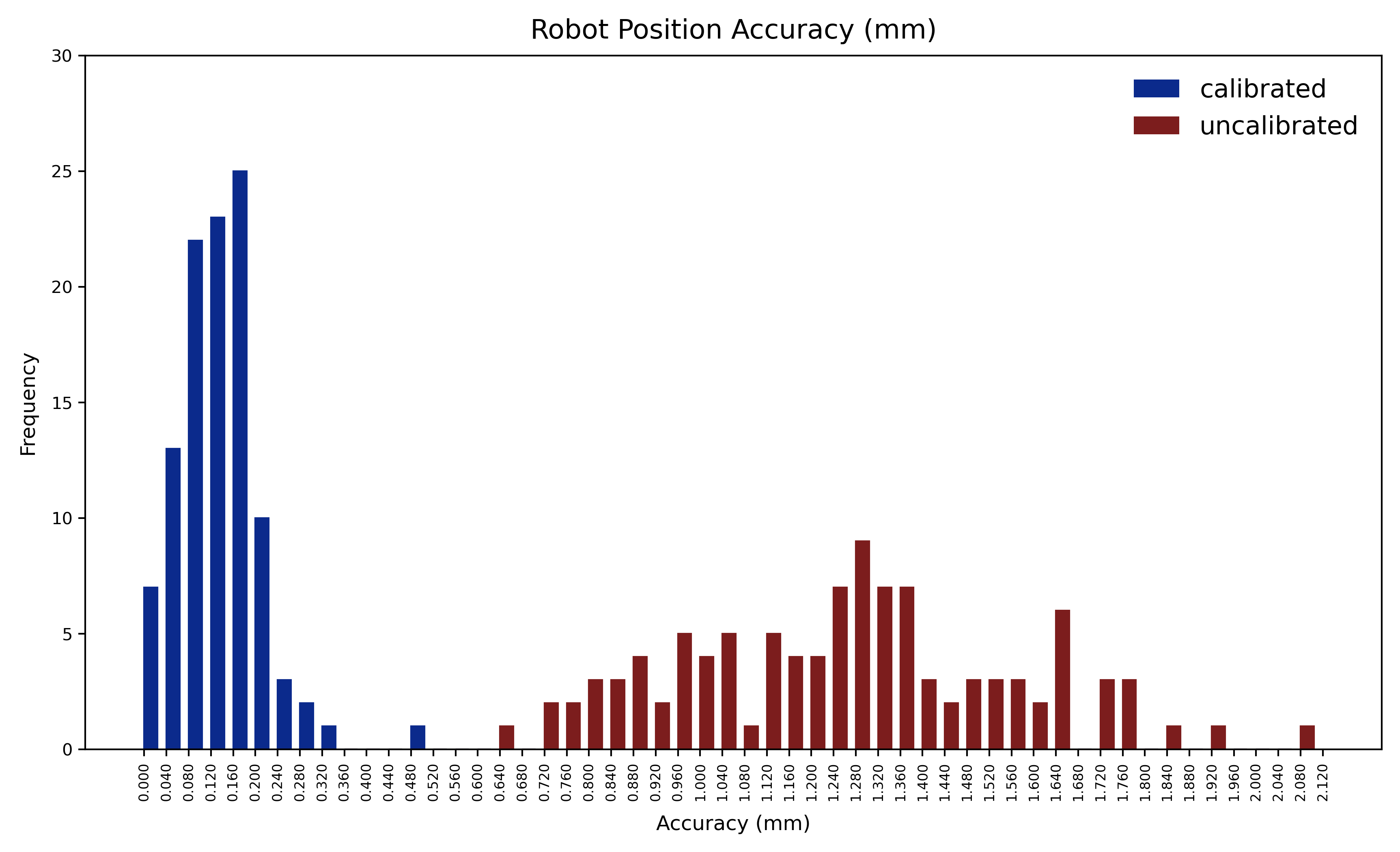
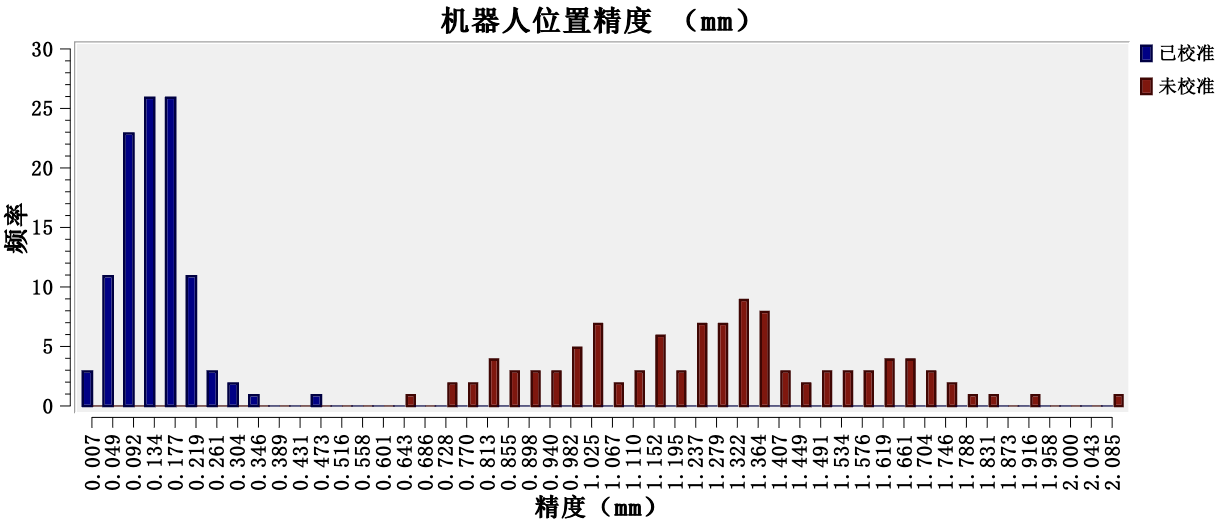
绝对定位精度数据(单位:mm)
相同颜色为对比项。
| 算法 | 数据集 | 校准状态 | mean | max | 90%max | σ | 6σ | num of points |
|---|---|---|---|---|---|---|---|---|
| 本算法 | 训练集 | 校准前(理论数值) | 1.285361 | 2.141703 | 1.673369 | 0.306290 | 1.837739 | 107 |
| 训练集 | 校准后(理论数值) | 0.142412 | 0.487590 | 0.213881 | 0.071394 | 0.428367 | 107 | |
| 测试集 | 校准后(实际测量) | 0.143818 | 0.501294 | 0.246057 | — | — | 44 | |
| RoboDK | 训练集 | 校准前(理论数值) | 1.269 | 2.128 | — | 0.309 | 2.196 | 107 |
| 训练集 | 校准后(理论数值) | 0.142 | 0.488 | — | 0.072 | 0.358 | 107 |
原始数据与报表见
代码的工作路径/RobotCalib/doc/TX200/与代码的工作路径/RobotCalib/results/TX200/。
要点:
- 与 RoboDK 在同一训练集上的理论结果一致量级。
- 实测精度位于原厂全域与立方体子域之间;由于训练/测试子域范围较原厂报告的立方体子域更大,误差略有放大属预期。
- 测试集位姿分布更复杂,精度略低于训练集理论值。
总体结论
在 TX2-90L 与 TX200 两个样例上,本算法成功复现了 RoboDK 的校准能力;写入控制器后的实测绝对精度接近 Staubli 原厂校准水平。
环境依赖
- C++17 编译器(GCC 9+/Clang 10+/MSVC 2019+)
- CMake 3.16+
- Eigen 3
- Ceres Solver(含
EigenQuaternionParameterization) - yaml-cpp
- Python 3(可视化脚本:
numpy、matplotlib)
Ubuntu 示例:
sudo apt update
sudo apt install -y build-essential cmake libeigen3-dev libyaml-cpp-dev libceres-dev \python3 python3-pip
pip3 install -U numpy matplotlib
macOS (Homebrew):
brew install cmake eigen ceres-solver yaml-cpp
pip3 install -U numpy matplotlib
编译
终端进入工程目录
mkdir build && cd build
cmake .. && make -j8
可执行文件输出:build/RobotCalibration
快速开始(内置样例)
项目提供两套样例数据 TX2-90L / TX200,样例数据是我在现场使用高精度设备采集的,并提供两套校准模型选项 simple / complete,推荐使用complete校准模型,本文所有的校准数据均使用complete模型获得:
# 运行样例:TX2-90L + complete
./build/RobotCalibration TX2-90L complete# 运行样例:TX200 + complete
./build/RobotCalibration TX200 complete
命令行参数:
Usage: RobotCalibration <robot_name: TX2-90L|TX200> <calib_mode: simple|complete>
程序会自动读取:
- DH:
config/DH/<robot_name>-default.yml - 选项:
config/option/CalibConfig<Simple|Complete>.yml - 测量:
config/measured/<robot_name>/机器人校准-Calibration.csv(及 Base/Tool 初始化所需 CSV)
输出默认写入:results/<robot_name>/
输出与可视化
运行结束后,results/<robot_name>/ 下包含:
OptimalReport_<robot_name>.txt:- Base/Tool 外参(平移 + 四元数)
- 原始与优化后的 DH 表
- 逐样本三维位置误差及统计
accuracy_stats_hist_<robot_name>.png:校准前后的定位精度对比直方图
示例,OptimalReport_TX2-90L.txt如下:
========================== Calibration Report ==========================[1]base2world Transformation( [X,Y,Z]mm|Quaternion[q1-q4] ):331.331991, 349.413195, 429.000644, -0.000022, 0.002251, 0.001411, 0.999996[2]tool2flange Transformation( [X,Y,Z]mm|Quaternion[q1-q4] ):24.990101, 0.213438, 14.899634, 0.000000, 0.000000, 0.000000, 1.000000[3] Original SDH Parameters:
Joint Alpha(deg) a(mm) theta(deg) d(mm)
------------------------------------------------------------------------
1 -90.000000 50.000000 0.000000 0.000000
2 0.000000 500.000000 -90.000000 0.000000
3 90.000000 0.000000 90.000000 50.000000
4 -90.000000 0.000000 0.000000 550.000000
5 90.000000 0.000000 0.000000 0.000000
6 0.000000 0.000000 0.000000 100.000000 [4] Optimized SDH Parameters:
Joint Alpha(deg) a(mm) theta(deg) d(mm)
------------------------------------------------------------------------
1 -89.976980 50.072944 0.000000 0.000000
2 0.021435 499.915919 -90.052042 0.000000
3 90.007793 -0.258274 90.043030 50.250723
4 -90.017136 0.022018 0.113726 549.979965
5 90.009449 -0.008709 -0.073612 -0.016915
6 0.000000 0.000000 0.000000 100.000000
------------------------------------------------------------------------[5] Measurement Errors (per group):测量1:误差 = 0.026507 mm / 0.664059 mm(校准/未校准)测量2:误差 = 0.022484 mm / 0.473525 mm(校准/未校准)测量3:误差 = 0.048078 mm / 0.593382 mm(校准/未校准)测量4:误差 = 0.017212 mm / 0.286039 mm(校准/未校准)测量5:误差 = 0.027732 mm / 0.647841 mm(校准/未校准)测量6:误差 = 0.032805 mm / 0.217326 mm(校准/未校准)测量7:误差 = 0.035003 mm / 0.285724 mm(校准/未校准)测量8:误差 = 0.047712 mm / 0.182410 mm(校准/未校准)测量9:误差 = 0.079666 mm / 0.328047 mm(校准/未校准)测量10:误差 = 0.063394 mm / 0.456054 mm(校准/未校准)测量11:误差 = 0.034709 mm / 0.391084 mm(校准/未校准)测量12:误差 = 0.022172 mm / 0.455564 mm(校准/未校准)测量13:误差 = 0.036401 mm / 0.372025 mm(校准/未校准)测量14:误差 = 0.030719 mm / 0.494504 mm(校准/未校准)测量15:误差 = 0.054269 mm / 0.580226 mm(校准/未校准)测量16:误差 = 0.034244 mm / 0.375517 mm(校准/未校准)测量17:误差 = 0.008812 mm / 0.634352 mm(校准/未校准)测量18:误差 = 0.035747 mm / 0.420587 mm(校准/未校准)测量19:误差 = 0.048377 mm / 0.445601 mm(校准/未校准)测量20:误差 = 0.062382 mm / 0.520417 mm(校准/未校准)测量21:误差 = 0.043945 mm / 0.516382 mm(校准/未校准)测量22:误差 = 0.028854 mm / 0.294653 mm(校准/未校准)测量23:误差 = 0.040496 mm / 0.220989 mm(校准/未校准)测量24:误差 = 0.012670 mm / 0.412269 mm(校准/未校准)测量25:误差 = 0.098429 mm / 0.802622 mm(校准/未校准)测量26:误差 = 0.034564 mm / 0.312927 mm(校准/未校准)测量27:误差 = 0.057626 mm / 0.691680 mm(校准/未校准)测量28:误差 = 0.017561 mm / 0.374001 mm(校准/未校准)测量29:误差 = 0.037320 mm / 0.463712 mm(校准/未校准)测量30:误差 = 0.050038 mm / 0.525567 mm(校准/未校准)测量31:误差 = 0.038108 mm / 0.874976 mm(校准/未校准)测量32:误差 = 0.046431 mm / 0.425734 mm(校准/未校准)测量33:误差 = 0.027192 mm / 0.575715 mm(校准/未校准)测量34:误差 = 0.016891 mm / 0.355442 mm(校准/未校准)测量35:误差 = 0.048557 mm / 0.327223 mm(校准/未校准)测量36:误差 = 0.056675 mm / 0.637538 mm(校准/未校准)测量37:误差 = 0.069998 mm / 0.400602 mm(校准/未校准)测量38:误差 = 0.086267 mm / 0.289902 mm(校准/未校准)测量39:误差 = 0.021268 mm / 0.472069 mm(校准/未校准)测量40:误差 = 0.035523 mm / 0.566289 mm(校准/未校准)测量41:误差 = 0.035594 mm / 0.565018 mm(校准/未校准)测量42:误差 = 0.036709 mm / 0.637583 mm(校准/未校准)测量43:误差 = 0.026452 mm / 0.207000 mm(校准/未校准)测量44:误差 = 0.024210 mm / 0.485523 mm(校准/未校准)测量45:误差 = 0.051299 mm / 0.372913 mm(校准/未校准)测量46:误差 = 0.053558 mm / 0.368482 mm(校准/未校准)测量47:误差 = 0.036068 mm / 0.304884 mm(校准/未校准)测量48:误差 = 0.022227 mm / 0.426705 mm(校准/未校准)测量49:误差 = 0.045959 mm / 0.338290 mm(校准/未校准)测量50:误差 = 0.064172 mm / 0.386015 mm(校准/未校准)测量51:误差 = 0.026428 mm / 0.523266 mm(校准/未校准)测量52:误差 = 0.017636 mm / 0.647093 mm(校准/未校准)测量53:误差 = 0.022520 mm / 0.511791 mm(校准/未校准)测量54:误差 = 0.032559 mm / 0.265368 mm(校准/未校准)测量55:误差 = 0.031090 mm / 0.471388 mm(校准/未校准)测量56:误差 = 0.031606 mm / 0.795395 mm(校准/未校准)测量57:误差 = 0.036189 mm / 0.473452 mm(校准/未校准)测量58:误差 = 0.035285 mm / 0.610204 mm(校准/未校准)测量59:误差 = 0.055424 mm / 0.681401 mm(校准/未校准)测量60:误差 = 0.027973 mm / 0.540605 mm(校准/未校准)[6]校准结果统计(位置误差,单位:mm)mean max 90%max σ 6σ number_of_points
------------------------------------------------------------------------------
校准前 0.466283 0.874976 0.647841 0.152851 0.917108 60
校准后 0.039163 0.098429 0.062382 0.017692 0.106153 60
示例,accuracy_stats_hist_TX2-90L.png如下:

手动生成直方图(可自定义输入报告路径):
python3 code/scripts/visualize_optimal_report.py results/TX200/OptimalReport_TX200.txt
演示平面法向与法向可视化(示例脚本):
python3 code/scripts/visualize_normal_plane.py
Docker(可选)
如需在容器内复现实验:
# 构建
docker build -t robotcalib -f docker/Dockerfile .# 运行(挂载当前工程,启用多核)
docker run --rm -it robotcalib \bash -lc "mkdir build && cd build && cmake .. && make -j8 && ./build/RobotCalibration TX2-90L complete"
如需导出图片到宿主机,确保将
results/目录挂载到宿主机路径。
技术服务
机械臂绝对精度/外参校准实战落地:提供线下的校准服务与线上的全量资料包(原理说明+完整代码+实测数据+软件操作+一线经验)。线上可持续答疑。
商业合作与答疑可加V,

可选的机械臂校准资料包
【机械臂校准资料包链接1】
【机械臂校准资料包链接2】
线上的全量资料包(原理说明+完整代码+实测数据+软件操作+一线经验)包括以下所有内容:
$ tree
.
├── 代码
│ └── RobotCalib
│ ├── CMakeLists.txt
│ ├── README.md
│ ├── code
│ │ ├── include
│ │ │ ├── core
│ │ │ │ ├── BaseCalib.hpp
│ │ │ │ ├── NormalCrossCompute.h
│ │ │ │ ├── RobotCalib.h
│ │ │ │ └── ToolCalib.hpp
│ │ │ └── tools
│ │ │ ├── DataReader.h
│ │ │ ├── DataStas.h
│ │ │ ├── Forward.h
│ │ │ └── MatrixCompute.h
│ │ ├── scripts
│ │ │ ├── visualize_normal_plane.py
│ │ │ └── visualize_optimal_report.py
│ │ └── source
│ │ ├── core
│ │ │ ├── NormalCrossCompute.cpp
│ │ │ └── RobotCalib.cpp
│ │ ├── main.cpp
│ │ └── tools
│ │ ├── DataReader.cpp
│ │ ├── DataStas.cpp
│ │ └── MatrixCompute.cpp
│ ├── config
│ │ ├── DH
│ │ │ ├── TX2-90L-default.yml
│ │ │ └── TX200-default.yml
│ │ ├── measured
│ │ │ ├── TX2-90L
│ │ │ │ ├── TX2-90L_绝对精度验证结果(测试集).xlsx
│ │ │ │ ├── 机器人校准-BaseSetup.csv
│ │ │ │ ├── 机器人校准-Calibration.csv
│ │ │ │ └── 机器人校准-ToolSetup.csv
│ │ │ └── TX200
│ │ │ ├── TX200_绝对精度验证结果(测试集).xlsx
│ │ │ ├── 机器人校准-BaseSetup.csv
│ │ │ ├── 机器人校准-Calibration.csv
│ │ │ └── 机器人校准-ToolSetup.csv
│ │ └── option
│ │ ├── CalibConfigComplete.yml
│ │ └── CalibConfigSimple.yml
│ ├── doc
│ │ ├── TX2-90L
│ │ │ ├── AbsoluteCalibrationQualityReport_TX2-90L.pdf
│ │ │ ├── RoboDK校准报告-TX2-90L.pdf
│ │ │ ├── RoboD校准位置精度截图-TX2-90L.png
│ │ │ ├── TX2-90L简介.png
│ │ │ └── 原厂校准位置精度截图-TX2-90L.png
│ │ ├── TX200
│ │ │ ├── AbsoluteCalibrationQualityReport_TX200.pdf
│ │ │ ├── RoboDK校准报告-TX200.pdf
│ │ │ ├── RoboDK校准位置精度截图-TX200.png
│ │ │ ├── TX200简介.png
│ │ │ └── 原厂校准位置精度截图-TX200.png
│ │ └── 计算共垂线的算法原理.md
│ ├── docker
│ │ └── Dockerfile
│ └── results
│ ├── TX2-90L
│ │ ├── OptimalReport_TX2-90L.txt
│ │ └── accuracy_stats_hist_TX2-90L.png
│ └── TX200
│ ├── OptimalReport_TX200.txt
│ └── accuracy_stats_hist_TX200.png
└── 文档├── robodk软件使用说明│ └── robodk进行机械臂校准的流程.vsdx├── 校准原理说明│ └── 工业六轴机械臂标定校准原理说明.docx└── 高级工程师经验分享└── staubli机械臂标定校准实施标准操作流程(真实工作经历吐血总结).docx28 directories, 49 files
(base)



)



)
:Qt Designer,VS Code使用designer,可能的报错)



:TablesNamesFinder 深度解析与 SQL 格式化实现)


)





全面解析)