目录
信号量和P、V原语
信号量集结构体
信号量操作接口
semget
semctl
semop
封装Sem
关于建造者模式
信号量和P、V原语
信号量和 P、V 原语由 Dijkstra (迪杰斯特拉)提出
信号量值含义
- S>0: S 表⽰可⽤资源的个数
- S=0: 表⽰⽆可⽤资源,⽆等待进程
- S<0: |S| 表⽰等待队列中进程个数
信号量结构体伪代码
//信号量本质上是⼀个计数器
struct semaphore
{
int value;
pointer_PCB queue;
}
P原语
P(s)
{
s.value = s.value--;
if (s.value < 0)
{
// 该进程状态置为等待状状态
// 将该进程的PCB插⼊⼊相应的等待队列s.queue末尾
}
}
V原语
V(s)
{
s.value = s.value++;
if (s.value > 0)
{
// 唤醒相应等待队列s.queue中等待的⼀⼀个进程
// 改变其状态为就绪态
// 并将其插⼊OS就绪队列
}
}
信号量集结构体
The semid_ds data structure is defined in <sys / sem.h> as follows :
struct semid_ds {
struct ipc_perm sem_perm; /* Ownership and permissions */
time_t sem_otime; /* Last semop time */
time_t sem_ctime; /* Last change time */
unsigned long sem_nsems; /* No. of semaphores in set */
};
The ipc_perm structure is defined as follows(the highlighted fields
are settable using IPC_SET) :
struct ipc_perm {
key_t __key; /* Key supplied to semget(2) */
uid_t uid; /* Effective UID of owner */
gid_t gid; /* Effective GID of owner */
uid_t cuid; /* Effective UID of creator */
gid_t cgid; /* Effective GID of creator */
unsigned short mode; /* Permissions */
unsigned short __seq; /* Sequence number */
};
信号量操作接口
semget
NAME
semget - get a System V semaphore set identifierSYNOPSIS
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
int semget(key_t key, int nsems, int semflg);
RETURN VALUE
If successful, the return value will be the semaphore set identifier
(a nonnegative integer), otherwise, -1 is returned, with errno indicating the
error.
参数介绍
- key: 信号量集的键值,同消息队列和共享内存
- nsems: 信号量集中信号量的个数
- semflg: 同消息队列和共享内存
semctl
NAME
semctl - System V semaphore control operations
SYNOPSIS
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
int semctl(int semid, int semnum, int cmd, ...);
This function has three or four arguments, depending on cmd.When there are four, the fourth has the type union semun.The calling program must define this union as follows :
union semun {
int val; /* Value for SETVAL */
struct semid_ds* buf; /* Buffer for IPC_STAT, IPC_SET */
unsigned short* array; /* Array for GETALL, SETALL */
struct seminfo* __buf; /* Buffer for IPC_INFO
(Linux-specific) */
};
RETURN VALUE
On failure, semctl() returns - 1 with errno indicating the error.
Otherwise, the system call returns a nonnegative value depending on
cmd as follows :
GETNCNT the value of semncnt.
GETPID the value of sempid.
GETVAL the value of semval.
GETZCNT the value of semzcnt.
IPC_INFO the index of the highest used entry in the kernel's internal
array recording information about all semaphore sets. (This information can
be used with repeated SEM_STAT or
SEM_STAT_ANY operations to obtain information about all semaphore sets
on the system.)
SEM_INFO as for IPC_INFO.
SEM_STAT the identifier of the semaphore set whose index was given in
semid.
SEM_STAT_ANY as for SEM_STAT.
All other cmd values return 0 on success.
- semid: 由 semget 返回的信号集标识码
- semnum: 信号集中信号量的序号
semnum: semctl() performs the control operation specified by cmd on the
System V semaphore set identified by semid, or on the semnum - th semaphore of
that set. (The semaphores in a set are numbered starting at 0.)
cmd: 将要采取的动作, 具体动作看 man ⼿册
semop
NAME
semop, semtimedop - System V semaphore operations
SYNOPSIS
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
int semop(int semid, struct sembuf* sops, size_t nsops);
semop() performs operations on selected semaphores in the set indicated by
semid.Each of the nsops elements in the array pointed to by sops is a
structure that specifies an operation to be performed on a single semaphore.
The elements of this structure are of type struct sembuf, containing the
following members :
unsigned short sem_num; /* semaphore number */
short sem_op; /* semaphore operation :-1,P操作。1,V操作
*/
short sem_flg; /* operation flags */
Flags recognized in sem_flg are IPC_NOWAIT and SEM_UNDO.If an operation specifies SEM_UNDO, it will be automatically undone when the process terminates.
RETURN VALUE
If successful, semop() and semtimedop() return 0; otherwise they
return -1 with errno indicating the error.
参数介绍
- semid: 是该信号量的标识码,也就是 semget 函数的返回值
- sops: 指向⼀个结构 sembuf 的指针
- nsops: sops 对应的信号量的个数,也就是可以同时对多个信号量进⾏PV操作
封装Sem
我们使⽤信号量,简化信号量使⽤,测试使⽤⼆元信号量进⾏显⽰器交替打印
Sem.hpp
#pragma once#include <iostream>
#include <string>
#include <memory>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
#include <unistd.h>const std::string pathname = "/tmp";
int proj_id = 0x77;#define GET_SEM IPC_CREAT // 不给权限
#define BUILD_SEM (IPC_CREAT | IPC_EXCL | 0666)// 只关注使用和删除
class Semaphore
{
public:Semaphore(int semid, int flag) : _semid(semid), _flag(flag){}void P(){struct sembuf sb; // 该结构系统提供sb.sem_num = 0;sb.sem_op = -1;sb.sem_flg = SEM_UNDO;int n = ::semop(_semid, &sb, 1);(void)n;}void V(){struct sembuf sb;sb.sem_num = 0;sb.sem_op = 1;sb.sem_flg = SEM_UNDO;int n = ::semop(_semid, &sb, 1);(void)n;}~Semaphore(){if(_flag == GET_SEM) return;// 让信号量自动销毁// 如果销毁信号量集合:The argument semnum is ignoredint n = ::semctl(_semid, 0, IPC_RMID);(void)n;std::cout << "sem set destroy!" << std::endl;}private:int _semid;int _flag;
};using sem_sptr = std::shared_ptr<Semaphore>;// 使用一下简单的建造者模式,用它来构建单sem
class SemaphoreBuilder
{
public:SemaphoreBuilder() : _val(-1){}SemaphoreBuilder &SetVal(int val){_val = val;return *this; // 支持连续访问}sem_sptr Build(int flag){// 0. 先做一下简单的合法性判断if (_val < 0){std::cerr << "you must init first!" << std::endl;return nullptr;}// 1. 申请key值key_t k = ::ftok(pathname.c_str(), proj_id);if (k < 0)exit(1);// 2. 根据初始值,创建信号量集合int semid = ::semget(k, 1, flag); // 这里让信号量集合中,只创建一个信号量就够用了if (semid < 0)exit(2);if (BUILD_SEM == flag){// 3. 初始化信号量union semun // 该联合体系统不提供,需要我们自己定义{int val; /* Value for SETVAL */struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */unsigned short *array; /* Array for GETALL, SETALL */struct seminfo *__buf; /* Buffer for IPC_INFO(Linux-specific) */} un;un.val = _val; // 设置为初始值int n = ::semctl(semid, 0, SETVAL, un);if (n < 0)exit(3);}// 4. 创建并返回信号量集合return std::make_shared<Semaphore>(semid, flag);}~SemaphoreBuilder(){}private:int _val; // 所有信号量的初始值
};Writer.cc:测试信号量接口
#include "Sem.hpp"
#include <cstdio>
#include <time.h>
#include <unistd.h>int main()
{SemaphoreBuilder sb;auto fsem = sb.SetVal(1).Build(BUILD_SEM); // 创建信号量集合,只有一个信号量,初始化成为1,就是当做锁来进行使用if (fork() == 0){auto csem = sb.Build(GET_SEM);int cnt = 10;while (cnt--){csem->P();printf("C");fflush(stdout);usleep(rand() % 95270);printf("C ");usleep(rand() % 43990);fflush(stdout);csem->V();}exit(0);}int cnt = 50;while (cnt--){fsem->P();printf("F");fflush(stdout);usleep(rand() % 95270);printf("F ");usleep(rand() % 43990);fflush(stdout);fsem->V();}return 0;
}结论:
- System V 信号量⽣命周期也是随内核的
- ipcs -s && ipcrm -s semid
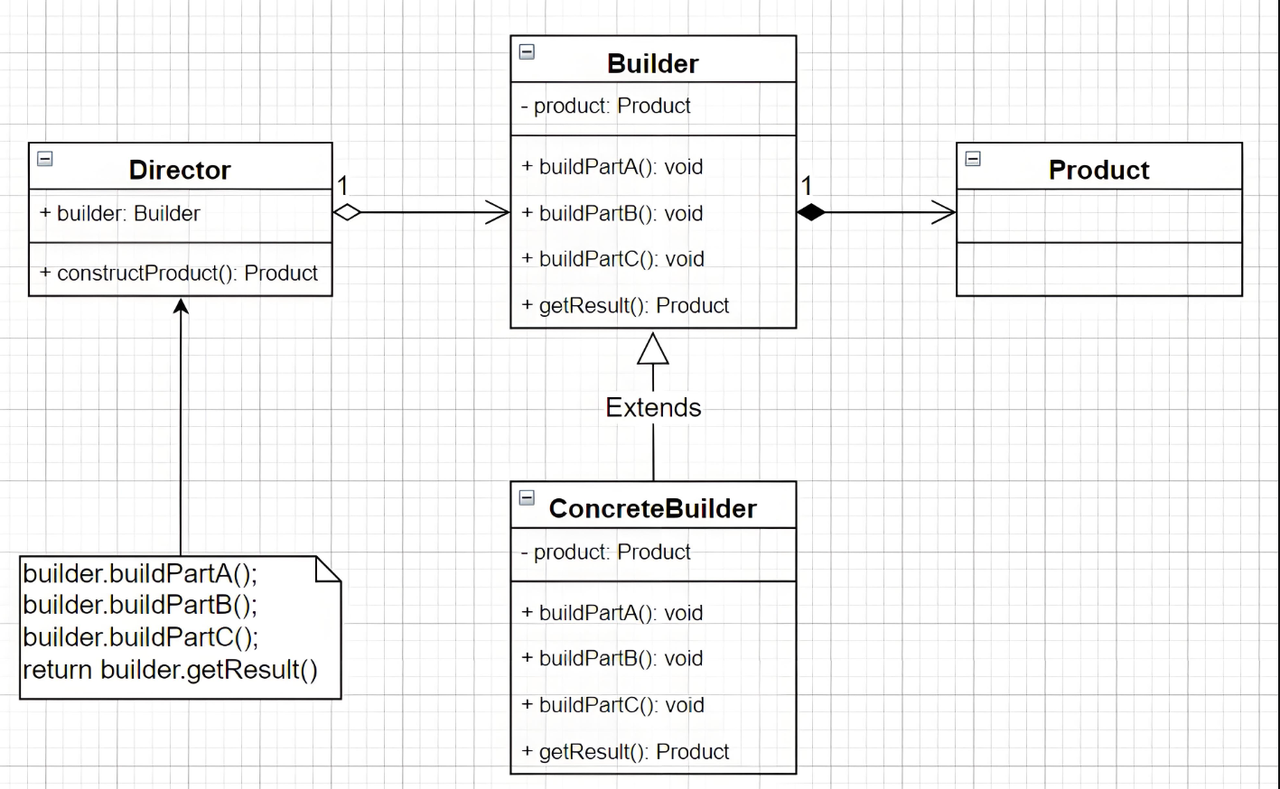
关于建造者模式
#ifndef SEM_HPP
#define SEM_HPP#include <iostream>
#include <memory>
#include <string>
#include <vector>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>const std::string SEM_PATH = "/tmp";
const int SEM_PROJ_ID = 0x77;
const int defaultnum = 1;
#define GET_SEM (IPC_CREAT)
#define BUILD_SEM (IPC_CREAT | IPC_EXCL)///////////////////////////先设计建造者模式的代码结构////////////// 一个把整数转十六进制的函数
std::string intToHex(int num)
{char hex[64];snprintf(hex, sizeof(hex), "0x%x", num);return std::string(hex);
}// 产品类, 只需要关心自己的使用即可(删除)
// 这里的Semaphore不是一个信号量!!而是一个信号量集合!!,要指明你要PV操作哪一个信号量!!
class Semaphore
{
private:void PV(int who, int data){struct sembuf sem_buf;sem_buf.sem_num = who; // 信号量编号,从0开始sem_buf.sem_op = data; // S + sem_buf.sem_opsem_buf.sem_flg = SEM_UNDO; // 不关心int n = semop(_semid, &sem_buf, 1);if (n < 0){std::cerr << "semop PV failed" << std::endl;}}
public:Semaphore(int semid) : _semid(semid){}int Id() const{return _semid;}void P(int who){PV(who, -1);}void V(int who){PV(who, 1);}~Semaphore(){if (_semid >= 0){int n = semctl(_semid, 0, IPC_RMID);if (n < 0){std::cerr << "semctl IPC_RMID failed" << std::endl;}std::cout << "Semaphore " << _semid << " removed" << std::endl;}}private:int _semid;// key_t _key; // 信号量集合的键值// int _perm; // 权限// int _num; // 信号量集合的个数
};// 建造者接口
class SemaphoreBuilder
{
public:virtual ~SemaphoreBuilder() = default;virtual void BuildKey() = 0;virtual void SetPermission(int perm) = 0;virtual void SetSemNum(int num) = 0;virtual void SetInitVal(std::vector<int> initVal) = 0;virtual void Build(int flag) = 0;virtual void InitSem() = 0;virtual std::shared_ptr<Semaphore> GetSem() = 0;
};// 具体建造者类
class ConcreteSemaphoreBuilder : public SemaphoreBuilder
{
public:ConcreteSemaphoreBuilder() {}virtual void BuildKey() override{// 1. 构建键值std::cout << "Building a semaphore" << std::endl;_key = ftok(SEM_PATH.c_str(), SEM_PROJ_ID);if (_key < 0){std::cerr << "ftok failed" << std::endl;exit(1);}std::cout << "Got key: " << intToHex(_key) << std::endl;}virtual void SetPermission(int perm) override{_perm = perm;}virtual void SetSemNum(int num) override{_num = num;}virtual void SetInitVal(std::vector<int> initVal) override{_initVal = initVal;}virtual void Build(int flag) override{// 2. 创建信号量集合int semid = semget(_key, _num, flag | _perm);if (semid < 0){std::cerr << "semget failed" << std::endl;exit(2);}std::cout << "Got semaphore id: " << semid << std::endl;_sem = std::make_shared<Semaphore>(semid);}virtual void InitSem() override{if (_num > 0 && _initVal.size() == _num){// 3. 初始化信号量集合for (int i = 0; i < _num; i++){if (!Init(_sem->Id(), i, _initVal[i])){std::cerr << "Init failed" << std::endl;exit(3);}}}}virtual std::shared_ptr<Semaphore> GetSem() override{ return _sem; }
private:bool Init(int semid, int num, int val){union semun{int val; /* Value for SETVAL */struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */unsigned short *array; /* Array for GETALL, SETALL */struct seminfo *__buf; /* Buffer for IPC_INFO(Linux-specific) */} un;un.val = val;int n = semctl(semid, num, SETVAL, un);if (n < 0){std::cerr << "semctl SETVAL failed" << std::endl;return false;}return true;}private:key_t _key; // 信号量集合的键值int _perm; // 权限int _num; // 信号量集合的个数std::vector<int> _initVal; // 初始值std::shared_ptr<Semaphore> _sem; // 我们要创建的具体产品
};// 指挥者类
class Director
{
public:void Construct(std::shared_ptr<SemaphoreBuilder> builder, int flag, int perm = 0666, int num = defaultnum, std::vector<int> initVal = {1}){builder->BuildKey();builder->SetPermission(perm);builder->SetSemNum(num);builder->SetInitVal(initVal);builder->Build(flag);if (flag == BUILD_SEM){builder->InitSem();}}
};#endif // SEM_HPPWriter.cc
#include "Sem_V.hpp"
#include <unistd.h>
#include <ctime>
#include <cstdio>int main()
{// 基于抽象接口类的具体建造者std::shared_ptr<SemaphoreBuilder> builder = std::make_shared<ConcreteSemaphoreBuilder>();// 指挥者对象std::shared_ptr<Director> director = std::make_shared<Director>();// 在指挥者的指导下,完成建造过程director->Construct(builder, BUILD_SEM, 0600, 3, {1, 2, 3});// 完成了对象的创建的过程,获取对象auto fsem = builder->GetSem();// sleep(10);// SemaphoreBuilder sb;// auto fsem = sb.SetVar(1).build(BUILD_SEM, 1);srand(time(0) ^ getpid());pid_t pid = fork();// 我们期望的是,父子进行打印的时候,C或者F必须成对出现!保证打印是原子的.if (pid == 0){director->Construct(builder, GET_SEM);auto csem = builder->GetSem();while (true){// csem->P(0);printf("C");usleep(rand() % 95270);fflush(stdout);printf("C");usleep(rand() % 43990);fflush(stdout);// csem->V(0);}}while (true){// fsem->P(0);printf("F");usleep(rand() % 95270);fflush(stdout);printf("F");usleep(rand() % 43990);fflush(stdout);// fsem->V(0);}return 0;
}:岭回归Ridge)





之使用教程(4)工具)
:)








)
---在独立的应用工程里使用MPU6050)

 Tokenizer)