一、深度学习框架对比
核心框架对比
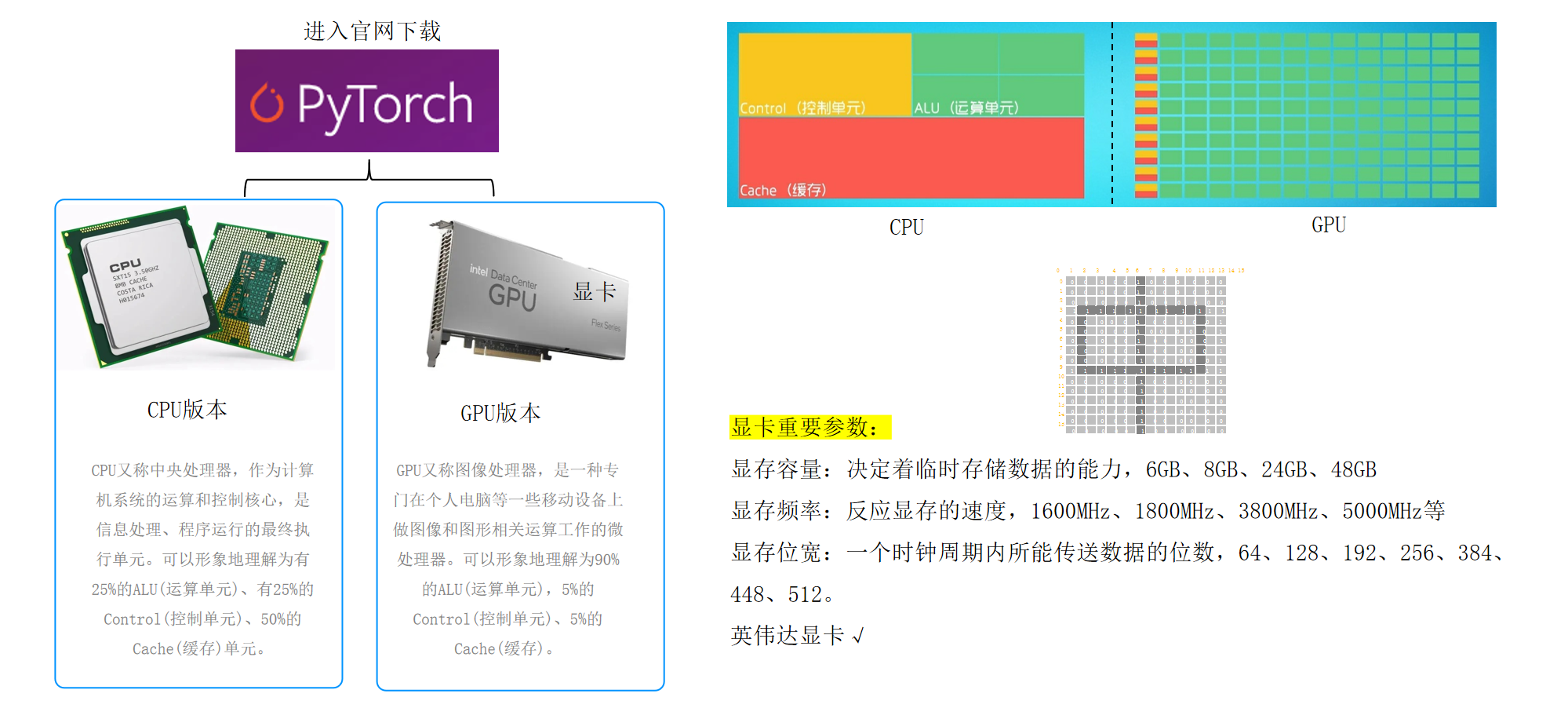
- PyTorch:支持GPU加速,底层基于NumPy,Meta(原Facebook)开发,生态完善(如Llama大模型)。
- TensorFlow:谷歌开发,存在2个不兼容版本(1.x/2.x),需注意版本选择。
- Keras:中小型企业常用,已逐渐被取代。
- 其他框架:如ONNX、MXNet等,但PyTorch因生态优势成为主流。
框架选择建议
- 优先学习PyTorch,因其兼容性强、文档丰富,且与最新大模型(如Llama)深度整合。
二、PyTorch安装要点
安装方式选择
- 避免使用pip在线安装:易因网络中断导致失败,推荐从官网下载预编译的
.whl文件离线安装。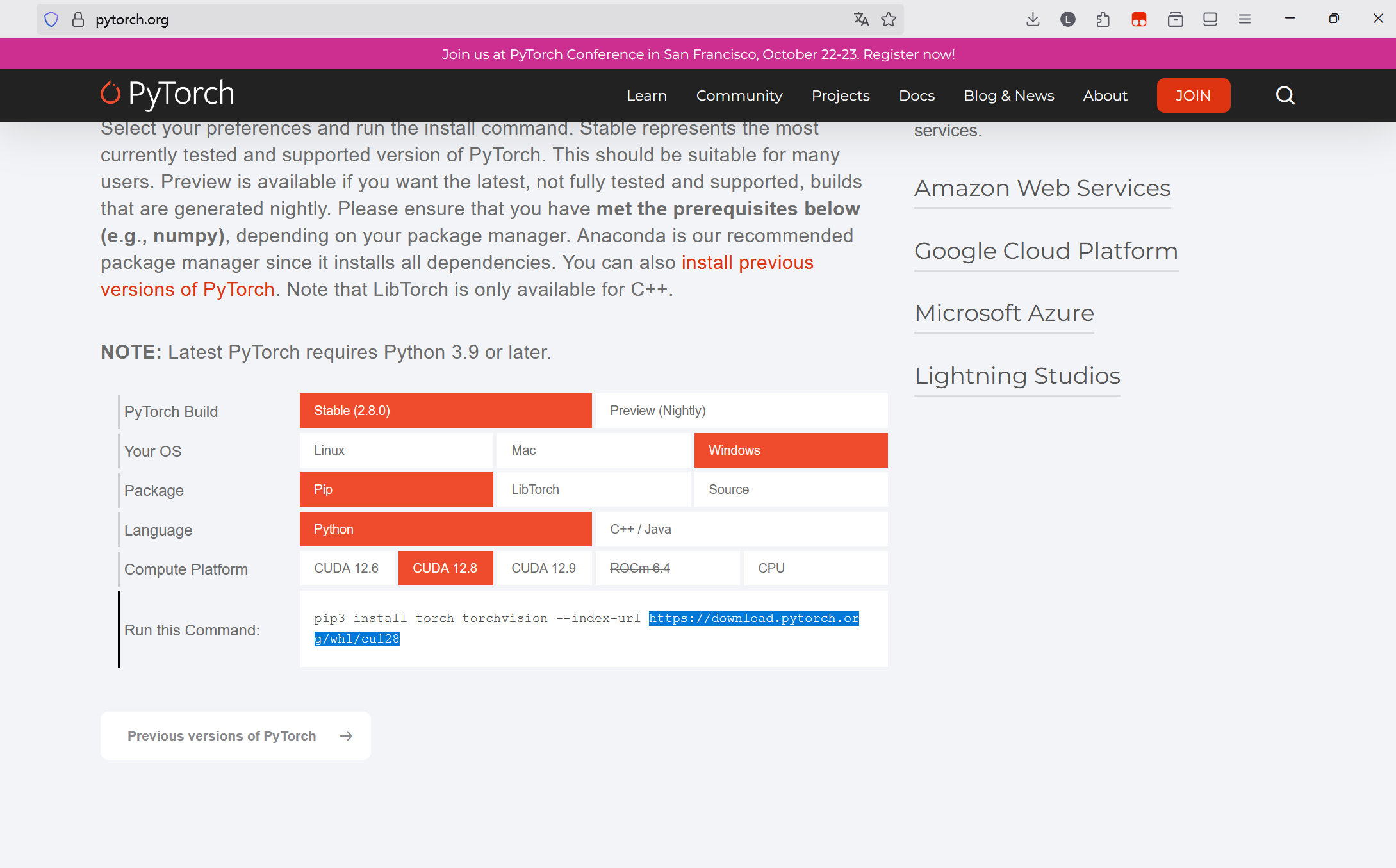
- 步骤:
- 检查CUDA版本(
nvidia-smi命令)(当前英伟达驱动支持的最高cuda版本是12.8)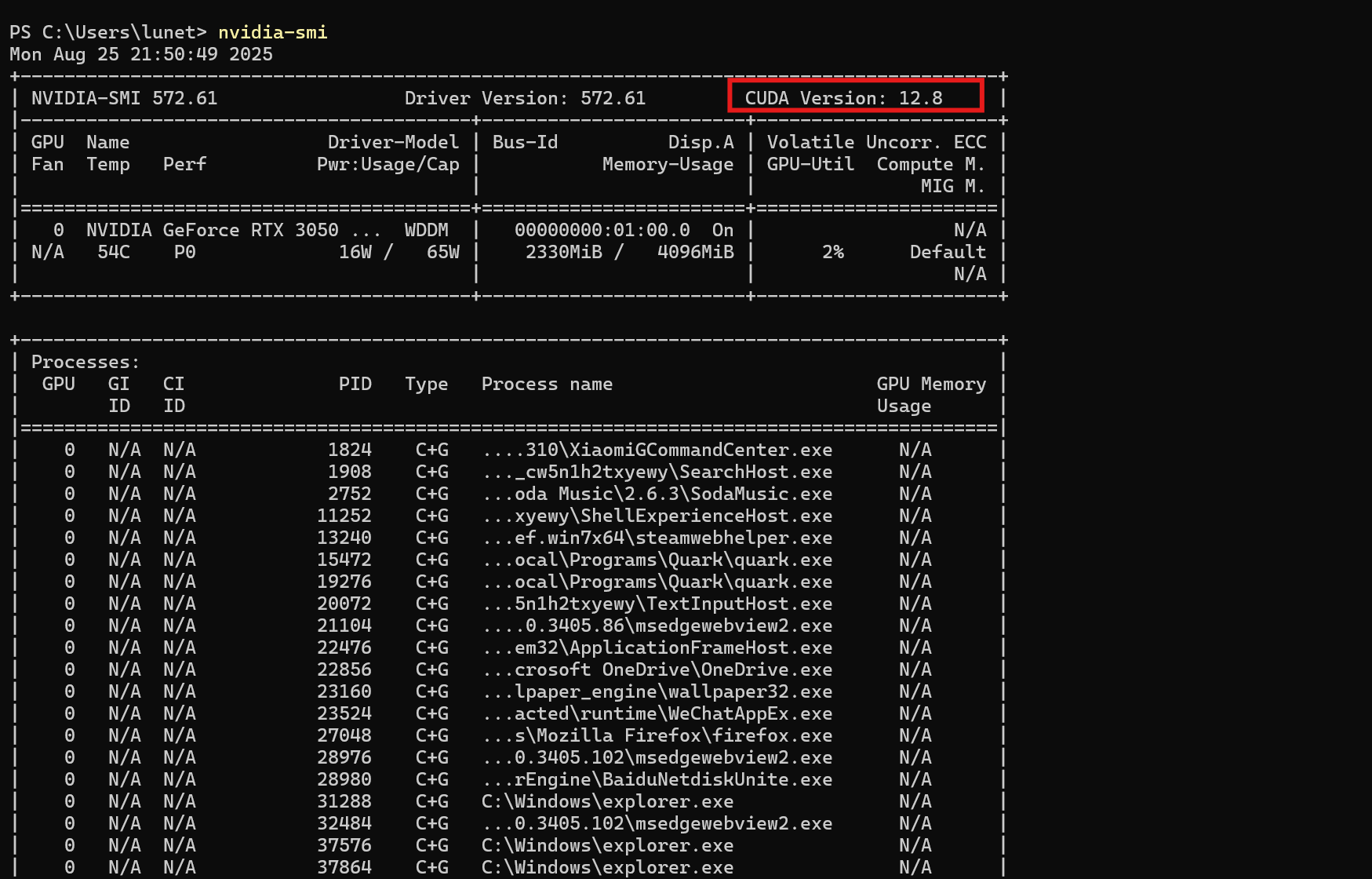
- 根据CUDA版本和Python版本选择对应的PyTorch版本。
- 下载并安装
pytorch和torchvision库(含数据集工具)。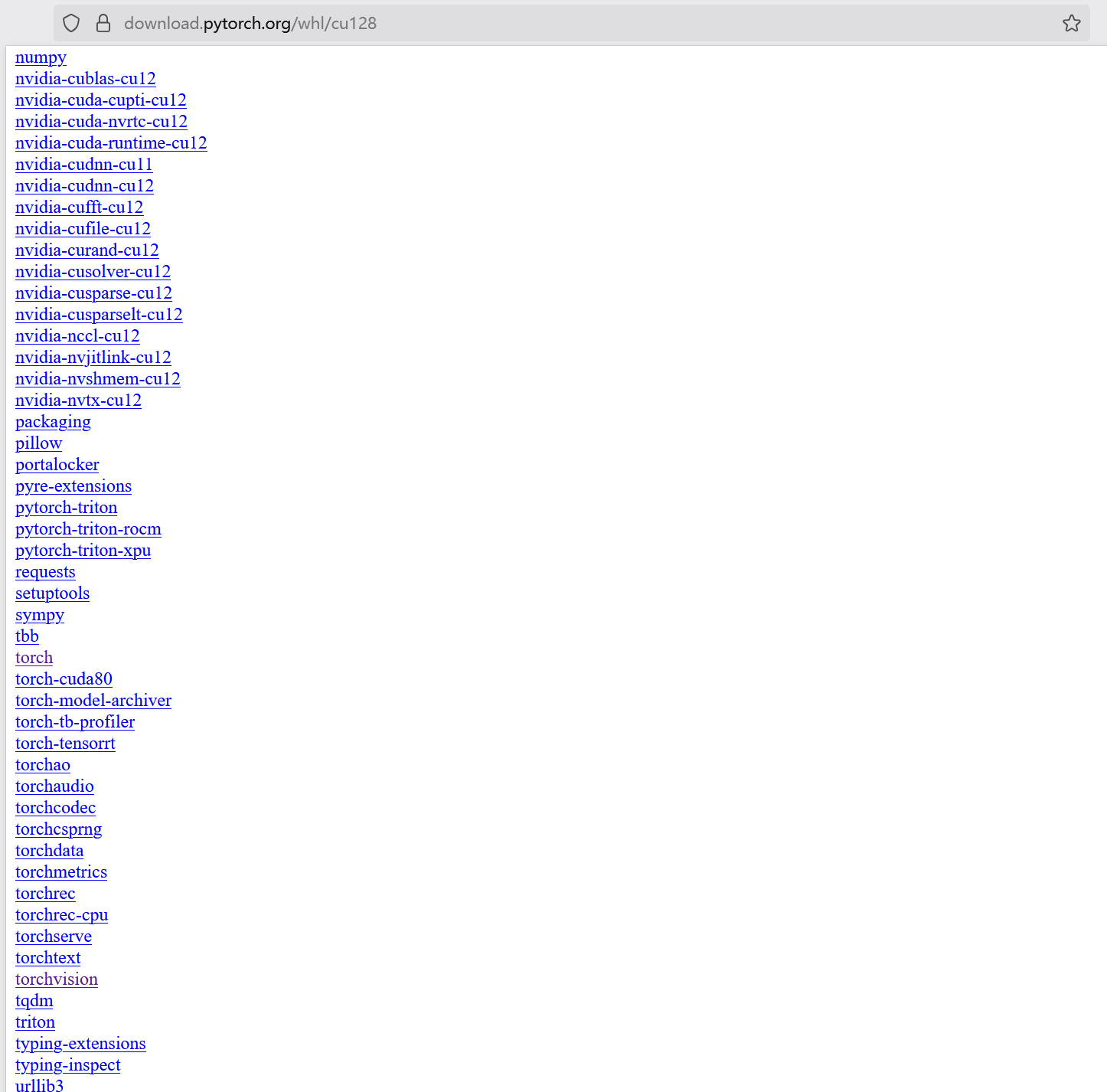
- 检查CUDA版本(
- 避免使用pip在线安装:易因网络中断导致失败,推荐从官网下载预编译的
CUDA与显卡驱动
- CUDA版本需与显卡驱动匹配,例如驱动支持CUDA 12.7时,可安装更高版本的PyTorch(显卡驱动>CUDA>PyTorch)。
- 英伟达显卡兼容性最佳,但需注意国内生态差异(如华为显卡需虚拟层模拟CUDA指令集)。
三、GPU与CPU性能差异
GPU优势
- 专为矩阵运算设计,单卡可并行处理多张图片(如batch size=32)。
- 显存容量决定单次处理数据量(6GB/8GB/48GB等)。
硬件选择建议
- 开发阶段:优先使用英伟达显卡,避免兼容性问题。
- 国产替代:国企项目需使用国产显卡(如中科曙光、紫光),但需额外封装层适配CUDA指令。
四、项目案例:pytorch框架认识-手写数字识别
# 环境验证模块
import torch
print(torch.__version__) # 验证PyTorch版本(示例输出:1.X)'''
MNIST数据集说明:
- 包含70,000张28x28灰度手写数字图像(60,000训练 + 10,000测试)
- 图像已居中处理,减少预处理需求
'''
import torch
from torch import nn
from torch.utils.data import DataLoader
from torchvision import datasets
from torchvision.transforms import ToTensor# 训练数据集配置
training_data = datasets.MNIST(root="data", # 数据集存储根目录train=True, # 加载训练集download=True, # 自动下载数据集transform=ToTensor() # 图像转换为张量格式(PyTorch原生支持)
)# 测试数据集配置
test_data = datasets.MNIST(root="data",train=False, # 加载测试集download=True,transform=ToTensor()
)# 打印训练集大小(应为60,000)
print(len(training_data))
模块总结
本模块完成开发环境验证和数据集准备:
- 验证PyTorch安装版本
- 数据准备:通过
datasets加载标准数据集(如datasets.MNIST(...)) - 数据预处理:使用
ToTensor将图像转换为张量 - 数据加载:通过
DataLoader将数据集分批次加载,支持训练时的高效迭代 - 模型构建:通过
nn模块定义网络结构(如全连接层、卷积层) - 使用
datasets.MNIST加载MNIST数据集(MNIST(Modified National Institute of Standards and Technology)数据集是手写数字识别领域最著名的标准数据集) ToTensor转换将PIL图像转为张量格式- 分离训练/测试集并自动下载数据
- 验证训练集样本数量(应为60,000)
# 数据加载模块
train_dataloader = DataLoader(training_data, batch_size=64) # 训练集数据加载器
test_dataloader = DataLoader(test_data, batch_size=64) # 测试集数据加载器# 测试批次数据形状验证
for X, y in test_dataloader:print(f"Shape of X [N, C, H, W]: {X.shape}") # 输出:[64, 1, 28, 28]print(f"Shape of y: {y.shape} {y.dtype}") # 输出:torch.Size([64]) torch.longbreak
模块总结
本模块实现数据加载与预处理:
- 使用
DataLoader创建批次数据加载器(batch_size=64)(batch size是指每次训练模型时使用的样本数量) - 验证数据格式:X为[batch_size, channels, height, width]的张量
- y为对应的标签张量(one-hot编码形式)
- 通过循环验证首个批次数据形状
# 设备检测模块
device = "cuda" if torch.cuda.is_available() else "mps" if torch.backends.mps.is_available() else "cpu"
print(f"Using {device} device") # 根据硬件自动选择最佳设备(CUDA/MPS/CPU)
模块总结
本模块实现设备适配:
- 优先检测CUDA可用性(NVIDIA显卡)
- 其次检测Apple MPS(苹果芯片专用)
- 最后回退到CPU执行
- 输出当前使用的设备类型
# 神经网络定义模块
class NeuralNetwork(nn.Module):def __init__(self):super().__init__() # 调用父类初始化self.flatten = nn.Flatten() # 展平操作(28*28→1维向量)self.hidden1 = nn.Linear(28*28, 128) # 第一隐藏层(输入→隐藏神经元数)self.hidden2 = nn.Linear(128, 256) # 第二隐藏层(隐藏→隐藏神经元数)self.out = nn.Linear(256, 10) # 输出层(隐藏→10类别)def forward(self, x): # 前向传播定义数据流路径x = self.flatten(x) # 展平操作x = torch.relu(self.hidden1(x)) # 第一隐藏层+ReLU激活x = torch.relu(self.hidden2(x)) # 第二隐藏层+ReLU激活x = self.out(x) # 输出层(未激活)return x
模块总结
本模块定义神经网络架构:
- 继承
nn.Module基类实现标准网络结构 - 包含三层全连接层:
- Flatten层将28x28图像展平为784维向量
- 隐藏层采用ReLU激活函数加速收敛
- 输出层直接输出10维向量(对应0-9数字分类)
forward方法严格定义数据流动路径
# 训练流程模块
def train(dataloader, model, loss_fn, optimizer):model.train() # 启用训练模式(允许参数更新)batch_size_num = 1 # 批次计数器for X, y in dataloader:X, y = X.to(device), y.to(device) # 数据移动到设备(CPU/GPU)pred = model(X) # 前向传播计算预测值loss = loss_fn(pred, y) # 计算交叉熵损失optimizer.zero_grad() # 清零梯度(关键步骤!)loss.backward() # 反向传播计算梯度optimizer.step() # 用梯度更新参数# 每100批次打印一次损失值if batch_size_num % 100 == 0:print(f"loss: {loss.item():>7f} [number:{batch_size_num}]")batch_size_num += 1
模块总结
本模块实现完整训练流程:
model.train()启用参数更新模式- 每批次执行以下步骤:
- 数据设备转移(CPU/GPU统一)
- 前向传播获取预测值
- 计算交叉熵损失
- 梯度清零→反向传播→参数更新(SGD流程)
- 使用学习率0.005的Adam优化器(默认配置)
- 每100批次打印一次损失值监控训练进度
# 测试评估模块
def test(dataloader, model, loss_fn):size = len(dataloader.dataset) # 总样本数(10,000)num_batches = len(dataloader) # 批次总数(约156)model.eval() # 切换为评估模式(禁用Dropout等随机操作)correct = 0 # 正确预测计数器total_loss = 0 # 累计损失值with torch.no_grad(): # 上下文管理器禁用梯度计算for X, y in dataloader:X, y = X.to(device), y.to(device)pred = model(X) # 前向传播获取预测值total_loss += loss_fn(pred, y).item() # 累加损失correct += (pred.argmax(1) == y).sum().item() # 统计正确预测数avg_loss = total_loss / num_batches # 计算平均损失accuracy = (correct / size) * 100 # 计算准确率百分比print(f"Test result: \n Accuracy: {accuracy:.2f}%, Avg loss: {avg_loss:.4f}")
模块总结
本模块实现模型评估:
model.eval()启用评估模式(稳定模型行为)- 使用
torch.no_grad()节省内存开销 - 计算两个核心指标:
- 平均损失值(衡量模型拟合程度)
- 准确率(模型在测试集上的表现)
- 使用argmax获取预测类别索引进行对比
- 最终输出格式化的评估结果(保留两位小数)
# 主程序执行模块(完整训练流程)
epochs = 10 # 训练轮数(可根据实际效果调整)
optimizer = torch.optim.Adam(model.parameters(), lr=0.005) # Adam优化器配置
loss_fn = nn.CrossEntropyLoss() # 多分类交叉熵损失函数for t in range(epochs): # 训练循环控制print(f"Epoch {t+1}\n-------------------------------") # 打印训练进度提示train(train_dataloader, model, loss_fn, optimizer) # 执行单轮训练
print("Done!") # 训练结束标记
test(test_dataloader, model, loss_fn) # 最终测试评估五、数据集处理与预处理
PyTorch内置工具
torchvision.datasets可直接下载MNIST等标准数据集(训练集+测试集)。DataLoader自动打包数据到GPU,减少IO耗时。
数据格式转换
- OpenCV读取的图片为NumPy数组(CPU格式),需转为
tensor类型以适配GPU计算。 to_tensor()方法实现数据类型转换。
- OpenCV读取的图片为NumPy数组(CPU格式),需转为
六、环境配置与工具安装
软件安装
- 使用
pip install torch进行PyTorch安装,支持GPU加速需配合CUDA驱动。 - 本地安装包下载与验证:通过官网下载大文件安装包,避免在线安装耗时。
- 检查安装路径:运行
确认版本。import torch; print(torch.__version__)
- 使用
计算设备选择
- 通过
torch.cuda.is_available()检测GPU支持性,自动分配设备:device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
- 通过
七、数据处理与加载
数据集导入与预处理
- 使用
torchvision.datasets加载MNIST手写数字数据集,包含训练集(6万张)和测试集(1万张)。 - 数据维度调整:将原始图像(28×28)展平为一维向量(28×28=784),并添加批次维度:
x = x.view(x.size(0), -1) # 展平为 [batch, 784]
- 使用
数据打包与批处理
- 使用
DataLoader将数据集切分为小批量(batch size=64),提升训练效率:train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True) - 每次迭代提取64张图片及其标签,形成输入张量(形状:[64, 784])和标签张量(形状:[64])
- 使用
八、模型设计与构建
网络架构
- 继承
nn.Module基类,定义多层全连接(Linear)结构:class Net(nn.Module):def __init__(self):super(Net, self).__init__()self.flatten = nn.Flatten()self.fc1 = nn.Linear(784, 128) # 输入层→隐藏层1(128神经元)self.fc2 = nn.Linear(128, 256) # 隐藏层1→隐藏层2(256神经元)self.fc3 = nn.Linear(256, 10) # 隐藏层2→输出层(10类别)def forward(self, x):x = self.flatten(x)x = F.relu(self.fc1(x)) # 隐藏层1激活(ReLU)x = F.relu(self.fc2(x)) # 隐藏层2激活(ReLU)x = self.fc3(x) # 输出层无激活(线性输出)return x
- 继承
前向传播逻辑
forward方法定义数据流向:输入→展平→隐藏层1→激活→隐藏层2→激活→输出层。- 注意:输出层不应用激活函数,直接输出线性结果以匹配多分类概率分布。
九、训练与优化
损失函数
- 多分类任务采用交叉熵损失(CrossEntropyLoss):
criterion = nn.CrossEntropyLoss()
- 多分类任务采用交叉熵损失(CrossEntropyLoss):
优化器与参数更新
- 使用SGD优化器调整模型权重:
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)
- 使用SGD优化器调整模型权重:
训练循环
- 遍历数据集,计算损失并反向传播更新参数:
model.train() for inputs, labels in train_loader:inputs, labels = inputs.to(device), labels.to(device)optimizer.zero_grad()outputs = model(inputs)loss = criterion(outputs, labels)loss.backward()optimizer.step()
- 遍历数据集,计算损失并反向传播更新参数:
十、关键细节与注意事项
张量维度解析
- 输入张量形状:[batch_size, channels, height, width] → 展平后为 [batch_size, 784]。

- 输出张量形状:[batch_size, num_classes]。

- 输入张量形状:[batch_size, channels, height, width] → 展平后为 [batch_size, 784]。
设备管理
- 将模型和数据移动至同一设备(CPU/GPU):
model = model.to(device) inputs = inputs.to(device)
- 将模型和数据移动至同一设备(CPU/GPU):
激活函数作用域
- 仅在隐藏层应用ReLU激活,输出层保留线性输出以生成类别概率。
十一、常见问题与调试
- 梯度消失问题:通过合理设置学习率(如0.01)和激活函数缓解。
- 设备冲突:确保模型与数据在同一设备上运行,避免类型错误。
- 批次大小调整:根据GPU内存动态调整batch size以平衡速度与稳定性。
十二、神经网络架构设计
类继承机制
- 继承
nn.Module基类实现模型定义,需重写__init__初始化网络层结构,并在forward方法中定义前向传播逻辑 - 示例:
class MyModel(nn.Module): def __init__(self): super().__init__(); self.fc1 = nn.Linear(...)
- 继承
网络层配置
- 定义各层神经元数量及连接关系(如全连接层
nn.Linear),通过forward自动管理数据流动 - 激活函数(如
nn.Sigmoid)可直接嵌入前向传播流程,或封装为独立模块(如nn.ReLU)
- 定义各层神经元数量及连接关系(如全连接层
十三、损失函数选择与应用
常用损失函数
- 交叉熵损失(
nn.CrossEntropyLoss):适用于分类任务,结合Softmax与NLLLoss - 其他类型:二元交叉熵(
BCELoss)、均方误差(MSELoss)、绝对误差(L1Loss) - 扩展能力:通过源码查找特定损失函数(如高斯损失)
- 交叉熵损失(
损失计算流程
- 前向传播输出预测结果
predict与真实标签y传入损失函数,得到标量损失值
- 前向传播输出预测结果
十四、优化器配置与参数更新
优化器选择
- 使用
torch.optim.SGD实现随机梯度下降(SGD),需传递两个参数:- 模型参数(
model.parameters()) - 学习率(控制参数更新步长)
- 模型参数(
- 使用
训练与测试模式
model.train()启用参数可更新状态model.eval()冻结参数(防止意外修改),常用于推理阶段
梯度更新流程
optimizer.zero_grad()清空历史梯度loss.backward()反向传播计算梯度optimizer.step()根据梯度更新参数
十五、训练过程实现
数据加载与批次处理
- 使用
DataLoader打包数据集,设置batch_size=64控制每批次数据量 - 循环遍历
DataLoader提取批次数据,执行前向传播与损失计算
- 使用
设备分配与并行计算
- 通过
x.to(device)将数据/模型移动至GPU(如device = torch.device("cuda:0")) - 多GPU支持:通过修改
device属性指定GPU索引(如device="cuda:1")
- 通过
训练监控
- 每批次记录损失值(
loss.item()转换Tensor为Python浮点数) - 每100批次打印训练进度,观察损失是否稳定下降以判断模型收敛性
- 每批次记录损失值(
十六、前向传播细节
数据维度变换
- 输入图片(28x28)展平为784维向量(
nn.Flatten()) - 全连接层输出维度动态计算:如输入64x784经128神经元层后输出64x128
- 输入图片(28x28)展平为784维向量(
非线性映射
- 激活函数(如ReLU)仅修改数值范围(如负数转为0),不改变数据维度
十七、关键代码片段
1. 神经网络模型搭建
- 继承nn.Module类:所有自定义神经网络需继承PyTorch的
nn.Module基类,实现__init__和forward方法class MyModel(nn.Module):def __init__(self):super(MyModel, self).__init__()self.flatten = nn.Flatten()self.fc1 = nn.Linear(784, 128)self.sigmoid = nn.Sigmoid()self.fc2 = nn.Linear(128, 10)def forward(self, x):x = self.flatten(x)x = self.fc1(x)x = self.sigmoid(x)x = self.fc2(x)return x - 层初始化:定义每层的神经元数量(如
nn.Linear(784, 128))和激活函数(如nn.Sigmoid()) - 前向传播流程:数据依次经过展平(Flatten)、全连接层(FC)和激活函数,最终输出预测结果
2. 损失函数与优化器
- 交叉熵损失函数:适用于多分类任务,结合LogSoftmax和NLLLoss
criterion = nn.CrossEntropyLoss() outputs = model(inputs) # (batch_size, num_classes) loss = criterion(outputs, labels) # labels为整数张量 - 优化器配置:使用SGD优化器,设置学习率
optimizer = torch.optim.SGD(model.parameters(), lr=0.01) - 参数更新步骤:清零梯度→反向传播→更新参数
optimizer.zero_grad() # 清零梯度 loss.backward() # 反向传播计算梯度 optimizer.step() # 根据梯度更新参数
3. 训练循环与数据加载
- 批量处理:使用
DataLoader按批次加载数据,提升训练效率train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True) - 训练循环逻辑:
- 数据与模型移动至同一设备(CPU/GPU)
- 执行前向传播计算预测值
- 计算损失并反向传播更新参数
- 定期打印损失值监控收敛情况
for inputs, labels in train_loader:inputs, labels = inputs.to(device), labels.to(device)optimizer.zero_grad()outputs = model(inputs)loss = criterion(outputs, labels)loss.backward()optimizer.step()if batch_idx % 100 == 0:print(f'Loss: {loss.item()}, Batch: {batch_idx}')
- 模型模式切换:训练时启用
model.train()允许参数更新,评估时用model.eval()冻结参数
4. 关键概念解析
- 前向传播:数据从输入层到输出层的计算过程,不涉及梯度更新
- 反向传播:根据损失函数计算梯度,用于优化参数
- 批量大小(Batch Size):控制每次训练的样本数,影响收敛速度和内存占用
- 设备管理:确保数据与模型在同一计算设备(如GPU)上运行,避免跨设备通信开销
5. 调试与验证
- 损失值监控:打印每个批次的损失值,观察是否逐渐降低(模型收敛的标志)
- 梯度清零:每次迭代前调用
optimizer.zero_grad(),防止梯度累积错误 - 动态维度调整:理解输入数据维度变化(如
64×28×28展平为64×784)
十八、训练过程
并行批量训练机制
- 一次性输入64个批次数据,创建64个独立神经网络并行训练。
- 所有网络共享参数(
Ω),更新时计算64个批次的平均损失,统一更新全局参数。
梯度更新策略
- 使用
torch.no_grad()上下文管理器清理反向传播产生的临时数据,优化内存利用。
- 使用
多轮训练重要性
- 单轮训练(6万张图片)仅能获得19.22%正确率,需通过循环训练集(如10轮)提升模型收敛性。
model.train()模式确保参数持续更新,避免重复初始化。
十九、测试过程
测试集评估逻辑
- 输入测试数据后,前向传播得到预测结果,通过
argmax提取最大概率对应的类别。 - 统计预测正确的数量,计算正确率(Correct / Total Test Samples)。
- 输入测试数据后,前向传播得到预测结果,通过
损失值与正确率的关系
- 测试阶段仍会计算损失值,但非核心指标;正确率(如70.04%)为模型性能的关键衡量标准。
资源管理优化
- 使用
with torch.no_grad()减少冗余计算,提升测试效率。
- 使用
二十、关键实现细节
数据预处理
- 测试数据需明确设备(GPU/CPU),通过
to(device)确保设备一致性。
- 测试数据需明确设备(GPU/CPU),通过
预测结果处理
- 将预测概率转换为类别标签,对比真实标签统计正确率。
训练效率优化
- 设置打印间隔(如每100批次输出一次损失值),平衡调试需求与训练速度。
二十一、实践要点
- 超参数调整:通过增加训练轮数(如从10轮扩展至50轮)可显著提升模型性能。
- 验证集作用:测试集主要用于评估最终模型效果,而非实时调参。
- 竞赛策略:合理分配训练时间,确保比赛前完成高效模型迭代。
二十二、关键代码片段
1. 批量梯度下降训练核心代码
# 初始化模型参数 Ω
model = MyNeuralNetwork().to(device) # device为'cuda'或'cpu'
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)
criterion = torch.nn.CrossEntropyLoss() # 分类任务损失函数# 训练循环
for epoch in range(num_epochs):for batch_idx, (inputs, labels) in enumerate(train_loader):# 前向传播outputs = model(inputs)loss = criterion(outputs, labels)# 反向传播 + 参数更新optimizer.zero_grad() # 清空梯度缓存loss.backward() # 反向传播计算梯度optimizer.step() # 更新参数 Ω# 每100批次打印一次损失值if batch_idx % 100 == 0:print(f"Epoch {epoch}, Batch {batch_idx}: Loss = {loss.item()}")
2. 多轮训练扩展
# 外层循环控制训练轮数
for epoch in range(num_epochs):# 内层循环执行单轮训练(6万张图片)for inputs, labels in train_loader:# ...(同上训练逻辑)...# 每轮结束后测试模型test_accuracy = evaluate_model(model, test_loader)print(f"Epoch {epoch+1} Test Accuracy: {test_accuracy}")
3. 测试集评估代码
def evaluate_model(model, test_loader):correct = 0total = 0with torch.no_grad(): # 禁用梯度计算以节省内存for inputs, labels in test_loader:inputs = inputs.to(device) # 确保数据在正确设备上labels = labels.to(device)outputs = model(inputs) # 前向传播_, predicted = torch.max(outputs.data, 1) # argmax获取预测类别total += labels.size(0) # 统计总样本数correct += (predicted == labels).sum().item() # 统计正确数return correct / total # 返回准确率
4. 关键优化点说明
- 设备兼容性:通过
inputs.to(device)统一数据与模型的设备(CPU/GPU) - 资源管理:
with torch.no_grad()减少测试阶段的内存占用 - 批量处理:64个批次并行训练加速收敛(需调整
DataLoader的batch_size)
二十三、核心问题
- 训练效率低:原模型使用随机梯度下降(SGD)优化器,需100轮训练才能达到98%正确率,耗时约10分钟;改用Adam优化器后,仅需10轮训练即可达到96.81%正确率。
梯度消失问题:Sigmoid激活函数的导数范围(0~0.25)导致多层网络参数更新停滞,损失值在局部震荡无法收敛。
二十四、关键知识点
1. 优化器改进:从SGD到Adam
- 原理:
- SGD每次用全部数据更新参数,易陷入局部最优且收敛慢;
- Adam通过自适应学习率和动量机制加速收敛,避免SGD的“高方差”问题。
代码示例:
# 原SGD优化器(需修改)
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)# 改为Adam优化器
optimizer = torch.optim.Adam(model.parameters(), lr=0.01)
2. 学习率影响
- 现象:固定学习率(如0.01)导致训练后期损失值震荡,无法逼近全局最优;
- 解决思路:动态调整学习率(如学习率衰减),但需后续章节展开。
3. 激活函数优化:Sigmoid → ReLU
- 梯度消失原因:
- Sigmoid导数范围(0~0.25)导致多层网络参数更新时梯度逐层衰减至0;
- 数学表达:

- ReLU优势:

- 计算简单,加速训练
代码示例:
# 原Sigmoid激活函数(需修改)
def sigmoid(x):return 1 / (1 + np.exp(-x))# 改为ReLU激活函数
def relu(x):return np.maximum(0, x)
二十五、实验结果对比

二十六、扩展思考
- 深层网络适配性:ReLU在超过3层的网络中表现优异,是现代深度学习的基础激活函数
- 优化器组合:AdamW(带权重衰减的Adam)可缓解过拟合,适合迁移学习场景




安全开发工程师)

)
)

)









)