温馨提示:
本篇文章已同步至"AI专题精讲" PPO:近端策略优化算法
摘要
我们提出了一类新的用于强化学习的 policy gradient 方法,该方法在与环境交互以采样数据和使用随机梯度上升优化一个“代理”目标函数之间交替进行。与标准的 policy gradient 方法每个数据样本只进行一次梯度更新不同,我们提出了一种新颖的目标函数,使得可以对同一批数据进行多个 epoch 的小批量更新。这些新方法被称为 Proximal Policy Optimization(PPO),它们继承了 Trust Region Policy Optimization(TRPO) 的一些优势,但实现更简单、适用范围更广,并且在经验上具有更好的样本效率。我们的实验在一系列基准任务上对 PPO 进行了测试,包括模拟的机器人运动和 Atari 游戏,结果表明 PPO 在所有在线 policy gradient 方法中表现更优,整体上在样本效率、简单性和运行时间之间达成了良好的平衡。
1 引言
近年来,已经提出了多种使用神经网络函数逼近器进行强化学习的方法。主要的候选方案包括 Deep Q-learning [Mni+15]、“vanilla” policy gradient 方法 [Mni+16] 以及 Trust Region / Natural Policy Gradient 方法 [Sch+15b]。不过,目前在开发一种具备可扩展性(适用于大型模型与并行实现)、数据高效性以及鲁棒性(即在多种问题中无需超参数调节即可成功)的算法方面,仍有改进空间。Q-learning(带函数逼近) 在许多简单问题上都会失败¹,且机制尚不清楚;vanilla policy gradient 方法 的数据效率和鲁棒性都较差;而 TRPO相对复杂,且不兼容某些结构中存在噪声(如 dropout)或参数共享(比如策略与价值函数间或与辅助任务共享参数)。
本文旨在通过引入一种仅依赖一阶优化的算法,来实现 TRPO 所具有的数据效率与可靠性。我们提出了一个带有截断概率比的全新目标函数,它构成了策略性能的悲观估计(即下界)。为了优化策略,我们在从策略中采样数据和在采样数据上进行多个 epoch 优化之间进行交替。我们的实验比较了不同版本的代理目标函数的性能,发现使用截断概率比的版本表现最佳。我们还将 PPO 与文献中的多种算法进行了对比。在连续控制任务中,它优于我们比较的其他算法;在 Atari 游戏中,其样本效率显著超过 A2C,且与 ACER 表现相当,但实现更为简单。
2 背景:策略优化
2.1 Policy Gradient 方法
Policy Gradient 方法通过估计策略梯度,并将其代入随机梯度上升算法来实现优化。最常用的梯度估计器形式如下:
g^=E^t[∇θlogπθ(at∣st)A^t](1)\hat{g} = \hat{\mathbb{E}}_t\left[\nabla_\theta \log \pi_\theta(a_t \mid s_t) \hat{A}_t\right] \quad(1) g^=E^t[∇θlogπθ(at∣st)A^t](1)
其中,πθ\pi_\thetaπθ 是一个随机策略,A^t\hat{A}_tA^t 是在时间步 ttt 的 Advantage Function 的估计值。这里的期望 E^t[…]\hat{\mathbb{E}}_t[\dots]E^t[…] 表示在有限样本批次上的经验平均,该算法在采样和优化之间交替进行。
在使用自动微分软件的实现中,策略梯度估计器是通过构建一个目标函数来获得的,该目标函数的梯度即为策略梯度估计器 g^\hat{g}g^;该目标函数为:
LPG(θ)=E^t[logπθ(at∣st)A^t](2)\begin{array} { r } { L ^ { P G } ( \theta ) = \hat { \mathbb { E } } _ { t } \Bigl [ \log \pi _ { \theta } ( a _ { t } \mid s _ { t } ) \hat { A } _ { t } \Bigr ] } \end{array}\quad(2) LPG(θ)=E^t[logπθ(at∣st)A^t](2)
虽然在相同轨迹上对该损失 LPGL^{PG}LPG 执行多步优化听起来是有吸引力的,但这种做法缺乏理论支撑,且在实践中常常会导致策略更新过大,从而产生破坏性效果(见第6.1节;相关结果未展示,但与“无剪切或惩罚”设定下的结果相似或更差)。
2.2 Trust Region 方法
在 TRPO [Sch+15b] 中,目标函数(即“代理”目标函数)在策略更新幅度受到约束的条件下被最大化。具体如下:
满足以下约束条件:
E^t[KL[πθold(⋅∣st),πθ(⋅∣st)]]≤δ(4)\hat{\mathbb{E}}_t \left[ \text{KL}[\pi_{\theta_{\text{old}}}(\cdot \mid s_t), \pi_\theta(\cdot \mid s_t)] \right] \leq \delta \quad(4) E^t[KL[πθold(⋅∣st),πθ(⋅∣st)]]≤δ(4)
这里,θold\theta_{\text{old}}θold 是更新之前的策略参数向量。这个问题可以通过共轭梯度算法(conjugate gradient algorithm)高效地近似求解,方法是在目标函数上做线性近似、在约束项上做二次近似。
TRPO 的理论实际上建议使用惩罚项替代约束,即求解如下的无约束优化问题:
maximizeθE^t[πθ(at∣st)πθold(at∣st)A^t−βKL[πθold(⋅∣st),πθ(⋅∣st)]](5)\operatorname* { m a x i m i z e } _ { \theta } \hat { \mathbb { E } } _ { t } \left[ \frac { \pi _ { \theta } ( a _ { t } \mid s _ { t } ) } { \pi _ { \theta _ { \mathrm { o l d } } } ( a _ { t } \mid s _ { t } ) } \hat { A } _ { t } - \beta \operatorname { K L } [ \pi _ { \theta _ { \mathrm { o l d } } } ( \cdot \mid s _ { t } ) , \pi _ { \theta } ( \cdot \mid s _ { t } ) ] \right]\quad(5) θmaximizeE^t[πθold(at∣st)πθ(at∣st)A^t−βKL[πθold(⋅∣st),πθ(⋅∣st)]](5)
其中 β\betaβ 是某个系数。这一做法的理论基础是,某种代理目标(其对状态取最大 KL 而非平均)构成了策略 π\piπ 表现的下界(即悲观估计)。TRPO 之所以采用硬约束而不是惩罚项,是因为很难选择一个在不同问题中都能表现良好的固定 β\betaβ 值——甚至在同一个问题中,随着学习过程的推进,问题特性也会发生变化。因此,为了实现我们提出的目标:使用一阶优化算法复现 TRPO 的单调性能改进,实验表明,仅仅使用固定惩罚系数 β\betaβ 并用 SGD 优化带惩罚项的目标函数(公式 (5))是不够的;还需要额外的修改。
3 Clipped Surrogate Objective
令 rt(θ)r_t(\theta)rt(θ) 表示概率比:
rt(θ)=πθ(at∣st)πθold(at∣st),因此 r(θold)=1。r_t(\theta) = \frac{\pi_\theta(a_t \mid s_t)}{\pi_{\theta_{\mathrm{old}}}(a_t \mid s_t)},\quad \text{因此}~r(\theta_{\mathrm{old}}) = 1。 rt(θ)=πθold(at∣st)πθ(at∣st),因此 r(θold)=1。
TRPO 最大化一个“代理”目标函数:
LCPI(θ)=E^t[πθ(at∣st)πθold(at∣st)A^t]=E^t[rt(θ)A^t](6)L^{CPI}(\theta) = \hat{\mathbb{E}}_t\left[ \frac{\pi_\theta(a_t \mid s_t)}{\pi_{\theta_{\mathrm{old}}}(a_t \mid s_t)} \hat{A}_t \right] = \hat{\mathbb{E}}_t\left[ r_t(\theta)\, \hat{A}_t \right] \quad(6) LCPI(θ)=E^t[πθold(at∣st)πθ(at∣st)A^t]=E^t[rt(θ)A^t](6)
上标 CPI 指的是 conservative policy iteration(保守策略迭代)[KL02],该目标函数即源自于此。如果没有约束,直接最大化 LCPIL^{CPI}LCPI 会导致过大的策略更新。因此,我们考虑如何修改该目标函数,以惩罚使 rt(θ)r_t(\theta)rt(θ) 偏离 1 的策略变动。
我们提出的主要目标函数如下:
LCLIP(θ)=E^t[min(rt(θ)A^t,clip(rt(θ),1−ϵ,1+ϵ)A^t)](7)L^{CLIP}(\theta) = \hat{\mathbb{E}}_t\left[ \min\left( r_t(\theta) \hat{A}_t, \operatorname{clip}(r_t(\theta), 1 - \epsilon, 1 + \epsilon)\, \hat{A}_t \right) \right] \quad(7) LCLIP(θ)=E^t[min(rt(θ)A^t,clip(rt(θ),1−ϵ,1+ϵ)A^t)](7)
其中 ϵ\epsilonϵ 是一个超参数,例如 ϵ=0.2\epsilon = 0.2ϵ=0.2。
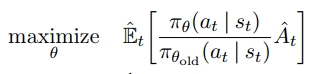
该目标函数的动机如下:min 内的第一个项即为 LCPIL^{CPI}LCPI;第二项 clip(rt(θ),1−ϵ,1+ϵr_t(\theta), 1 - \epsilon, 1 + \epsilonrt(θ),1−ϵ,1+ϵ)对概率比进行截断,从而移除了将 rtr_trt 移出区间 [1−ϵ,1+ϵ][1 - \epsilon, 1 + \epsilon][1−ϵ,1+ϵ] 的动机。最终我们取截断前后的最小值,因此最终目标函数是未截断目标的一个下界(即悲观估计)。该方法只在改变概率比会提升目标函数时忽略这种改变,而当其会使目标变差时就保留这种惩罚。注意,在 θold\theta_{\mathrm{old}}θold 附近的一阶近似下,LCLIP(θ)=LCPI(θ)L^{CLIP}(\theta) = L^{CPI}(\theta)LCLIP(θ)=LCPI(θ)(即 r=1r = 1r=1 时),然而当 θ\thetaθ 远离 θold\theta_{\mathrm{old}}θold 时,两者将会不同。图 1 绘制了 LCLIPL^{CLIP}LCLIP 中单个 ttt 项的图像;注意,概率比 rrr 在 1−ϵ1 - \epsilon1−ϵ 或 1+ϵ1 + \epsilon1+ϵ 处被截断,具体取决于优势值是正还是负。
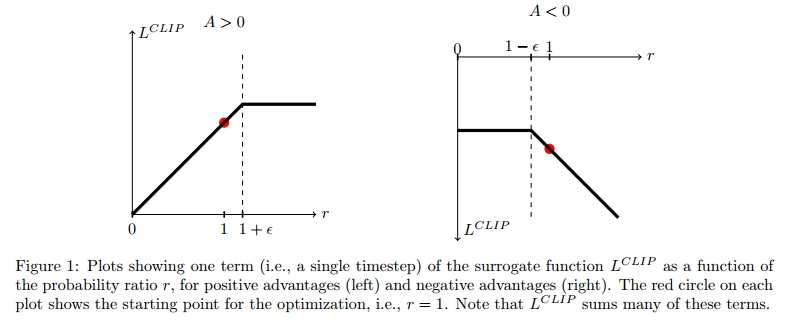
图 2 提供了关于代理目标 LCLIPL^{CLIP}LCLIP 的另一种直观理解。它展示了在策略更新方向上插值得到的多个目标函数是如何变化的,该更新方向是通过 proximal policy optimization(我们即将介绍的算法)在一个连续控制问题中得到的。我们可以看到,LCLIPL^{CLIP}LCLIP 是 LCPIL^{CPI}LCPI 的一个下界,并对策略更新过大的情况施加了惩罚。
4 自适应 KL 惩罚系数
另一种方法可以作为 clipped surrogate objective 的替代方案,或者与其结合使用,即对 KL 散度施加惩罚,并自适应地调整惩罚系数,以便在每次策略更新时达到某个目标 KL 散度 dtargd_{\text{targ}}dtarg。在我们的实验中,我们发现 KL 惩罚的表现不如 clipped surrogate objective,然而我们仍在此处包括这一方法,因为它是一个重要的基线方法。
在该算法最简单的实现中,每次策略更新执行以下步骤:
-
使用多个 epoch 的小批量 SGD,优化带 KL 惩罚的目标函数:
LKLPEN(θ)=E^t[πθ(at∣st)πθold(at∣st)A^t−βKL[πθold(⋅∣st),πθ(⋅∣st)]](8)L^{KLPEN}(\theta) = \hat{\mathbb{E}}_t \left[ \frac{\pi_\theta(a_t \mid s_t)}{\pi_{\theta_{\text{old}}}(a_t \mid s_t)} \hat{A}_t - \beta \, \mathrm{KL}[\pi_{\theta_{\text{old}}}(\cdot \mid s_t), \pi_\theta(\cdot \mid s_t)] \right] \quad(8) LKLPEN(θ)=E^t[πθold(at∣st)πθ(at∣st)A^t−βKL[πθold(⋅∣st),πθ(⋅∣st)]](8)
-
计算 d=E^t[KL[πθold(⋅∣st),πθ(⋅∣st)]]d = \hat{\mathbb{E}}_t[\mathrm{KL}[\pi_{\theta_{\text{old}}}(\cdot \mid s_t), \pi_\theta(\cdot \mid s_t)]]d=E^t[KL[πθold(⋅∣st),πθ(⋅∣st)]]
– 如果 d<dtarg1.5d < \frac{d_{\text{targ}}}{1.5}d<1.5dtarg,则令 β←β/2\beta \leftarrow \beta / 2β←β/2
– 如果 d>dtarg×1.5d > d_{\text{targ}} \times 1.5d>dtarg×1.5,则令 β←β×2\beta \leftarrow \beta \times 2β←β×2
更新后的 β\betaβ 会在下一次策略更新中使用。在该机制下,我们偶尔会看到 KL 散度与 dtargd_{\text{targ}}dtarg 相差较大的策略更新,但这类情况比较罕见,且 β\betaβ 会快速调整。上述参数 1.5 和 2 是启发式选择的,但该算法对它们并不敏感。初始值 β\betaβ 是另一个超参数,但在实践中影响不大,因为算法能迅速调整它。
温馨提示:
阅读全文请访问"AI深语解构" PPO:近端策略优化算法

:,及解决)

















