目录
1.环境感知与目标检测
2.无人机定位与导航(SLAM与路径规划)
3.无人机网络通信与资源优化
4.无人机集群协同控制(一致性与编队)
5.无人机任务分配与调度(组合优化)
6.MATLAB仿真测试
基于人工智能的无人机网络系统通常由多个无人机节点组成,这些无人机可在目标区域内执行各种任务,如为地面用户提供通信服务、进行环境监测、物流配送等。无人机配备了传感器、通信设备和计算模块等,能够感知周围环境信息、与其他无人机或地面基站进行通信,并根据人工智能算法做出决策。
1.环境感知与目标检测
无人机通过视觉传感器(摄像头、激光雷达)感知环境,需完成目标识别、障碍物检测等任务,核心依赖深度学习的卷积神经网络(CNN)和目标检测算法。
卷积神经网络(CNN)

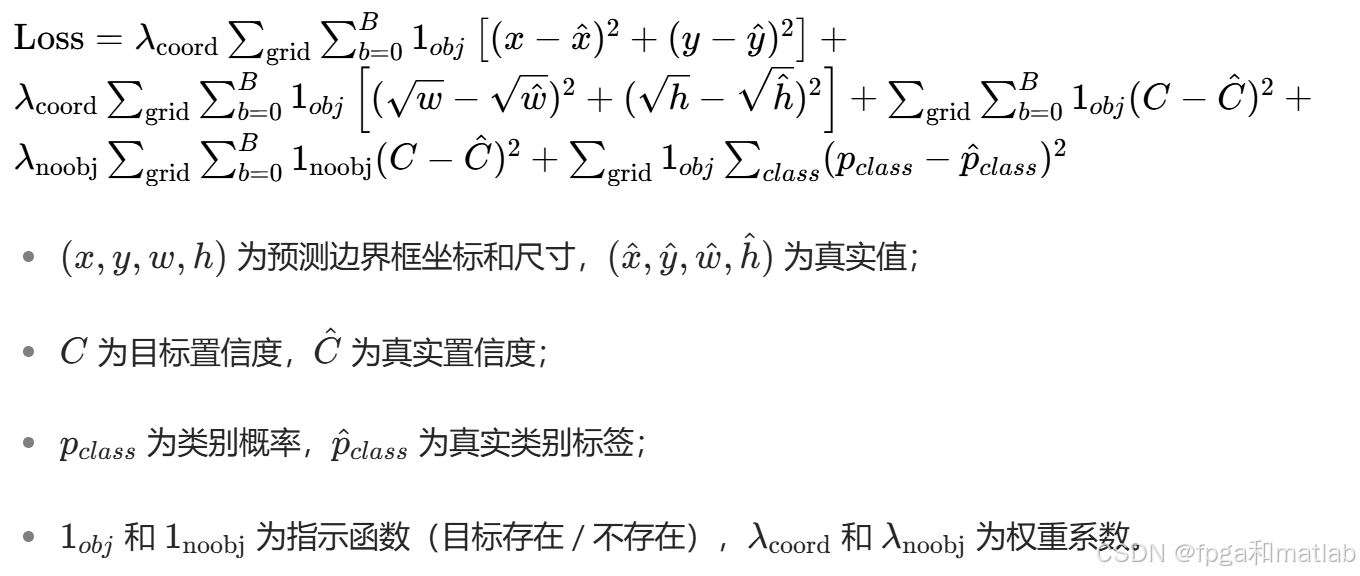
目标检测损失函数(YOLO系列)
用于优化目标边界框预测和类别分类,总损失公式为:
2.无人机定位与导航(SLAM与路径规划)
无人机需通过同步定位与地图构建(SLAM)确定自身位置,并基于AI算法规划最优路径。
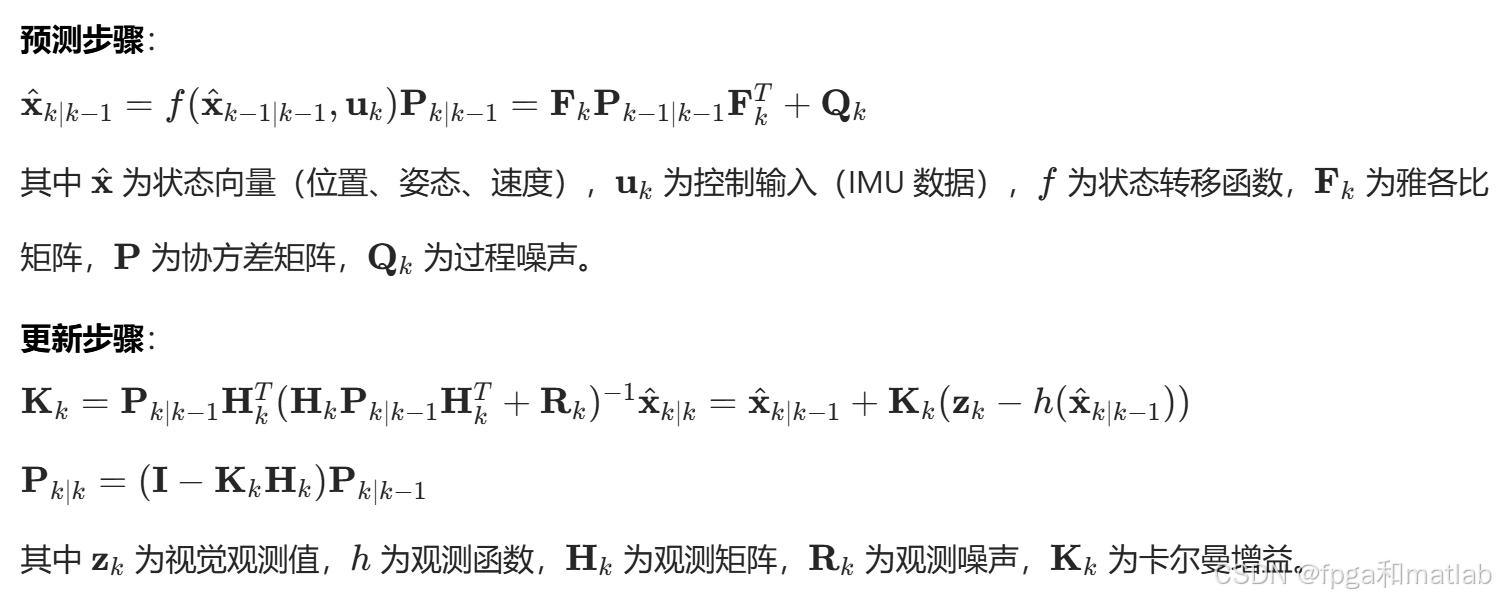
视觉SLAM中的状态估计(扩展卡尔曼滤波,EKF)
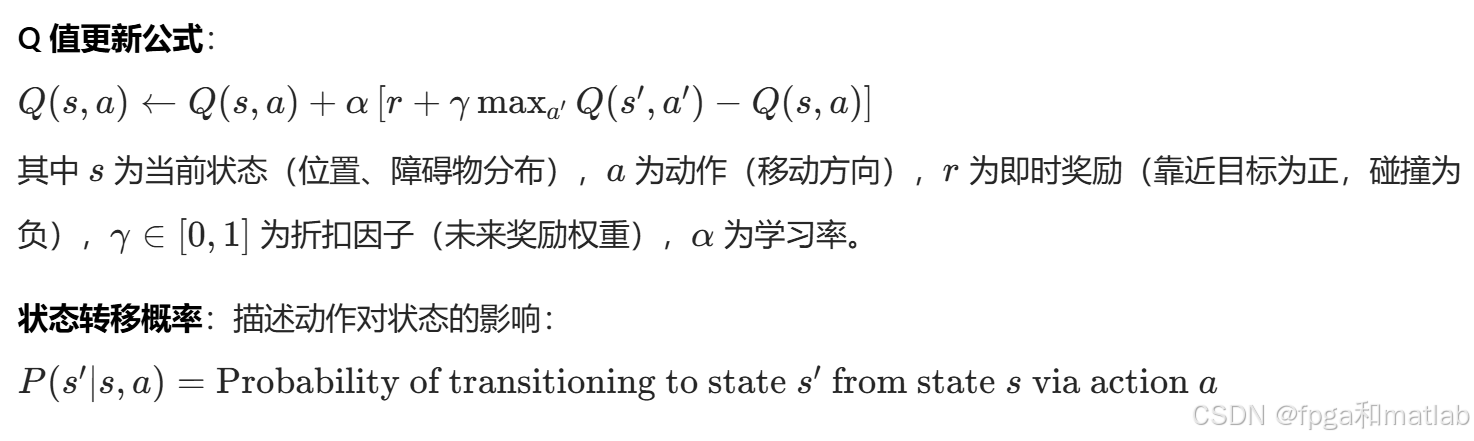
基于强化学习的路径规划(DQN算法)
无人机通过试错学习最优路径,目标是最大化累积奖励,核心公式为:
3.无人机网络通信与资源优化
无人机网络需动态分配通信资源(频段、功率),保障数据传输效率,常用优化算法和博弈论模型。
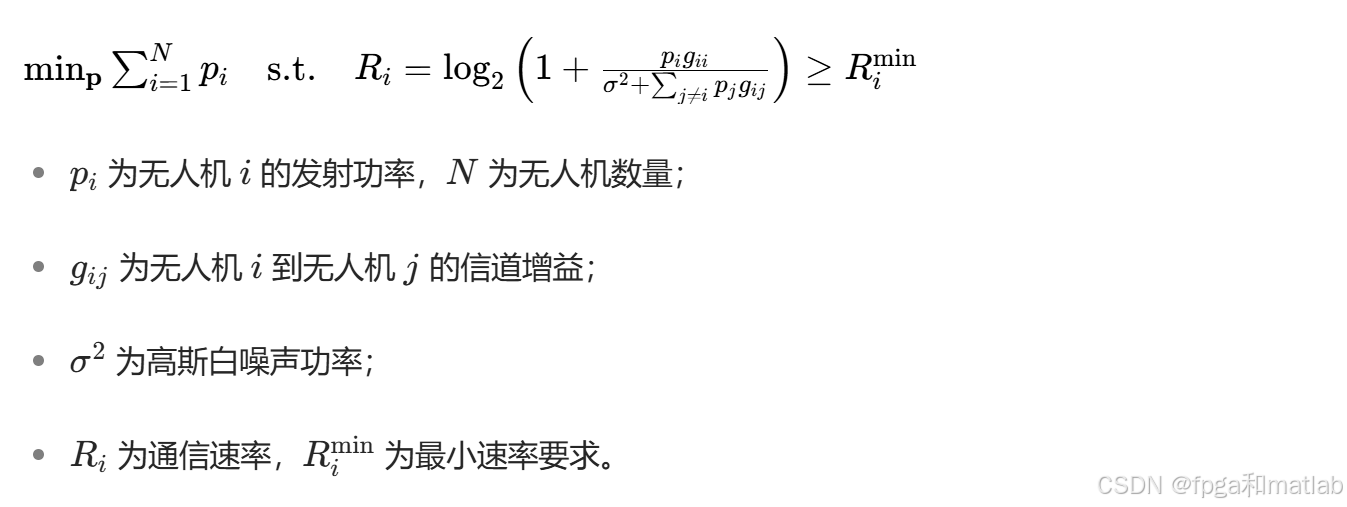
1. 功率控制优化(最小化能耗)
目标:在满足通信速率要求的前提下,最小化无人机发射功率,公式为:
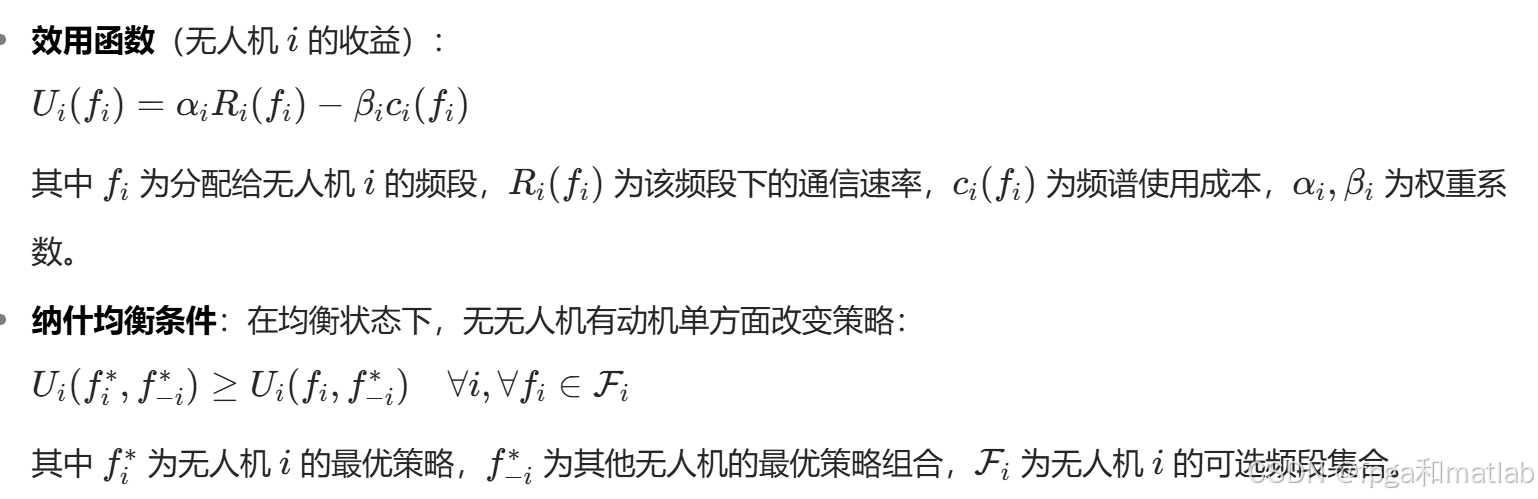
2. 频谱分配博弈模型(非合作博弈)
无人机作为博弈参与者竞争频谱资源,通过纳什均衡实现资源分配,公式为:
4.无人机集群协同控制(一致性与编队)
多无人机需保持编队或协同完成任务(如搜索、救援),依赖一致性算法和分布式控制。
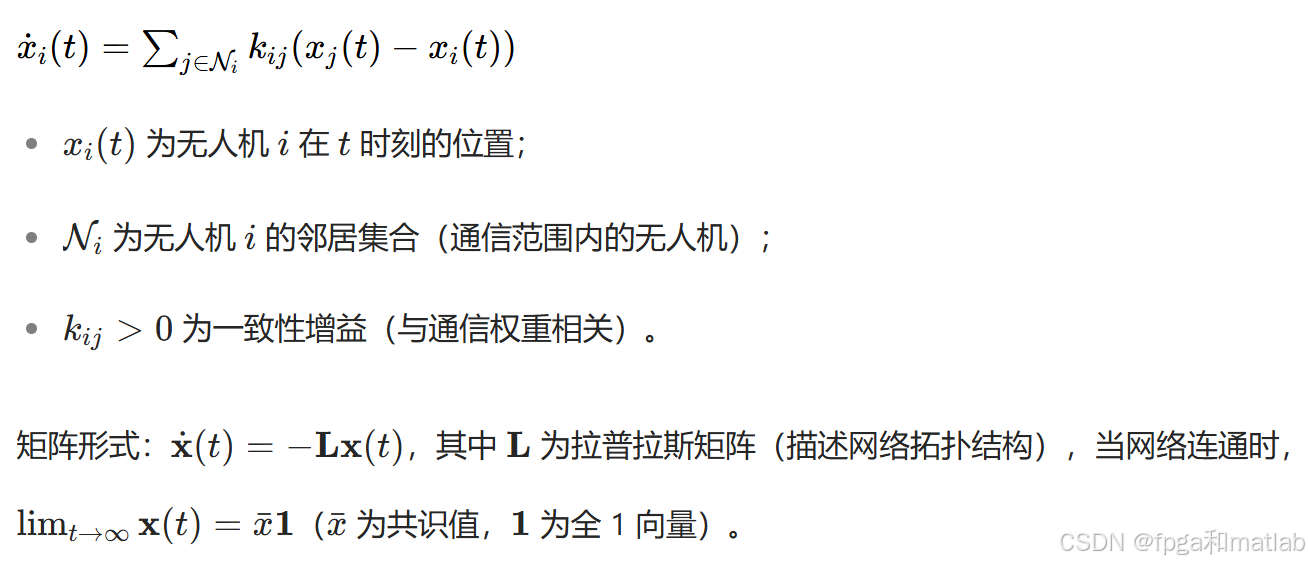
一致性算法(位置同步)
目标:使所有无人机位置收敛到同一值,公式为:
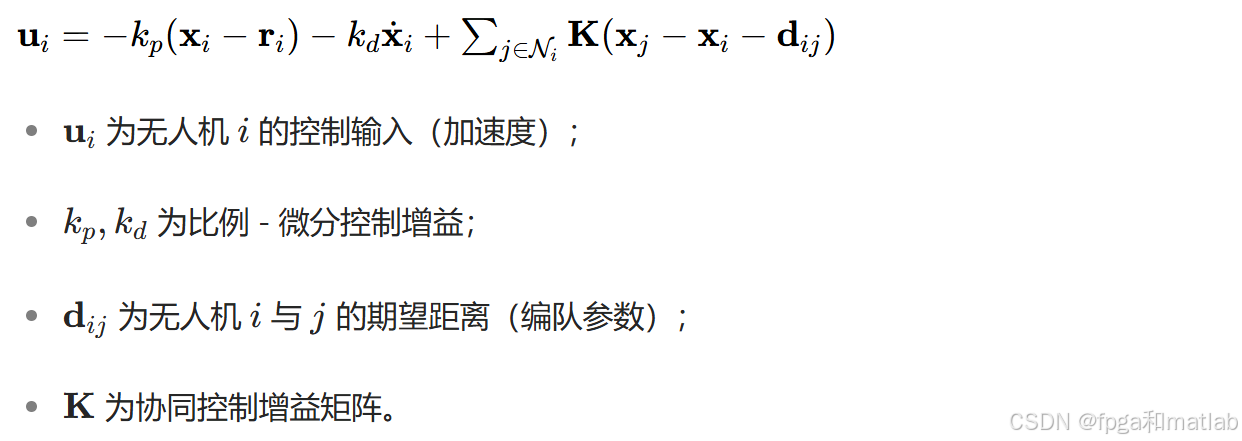
基于图论的编队控制(跟踪参考轨迹)
无人机按预设队形移动,跟踪参考点ri(t)(如三角形编队中各无人机的相对位置),控制律公式为:
5.无人机任务分配与调度(组合优化)
多无人机协同完成任务(如区域覆盖、目标跟踪),需优化任务分配方案,常用整数规划和遗传算法。
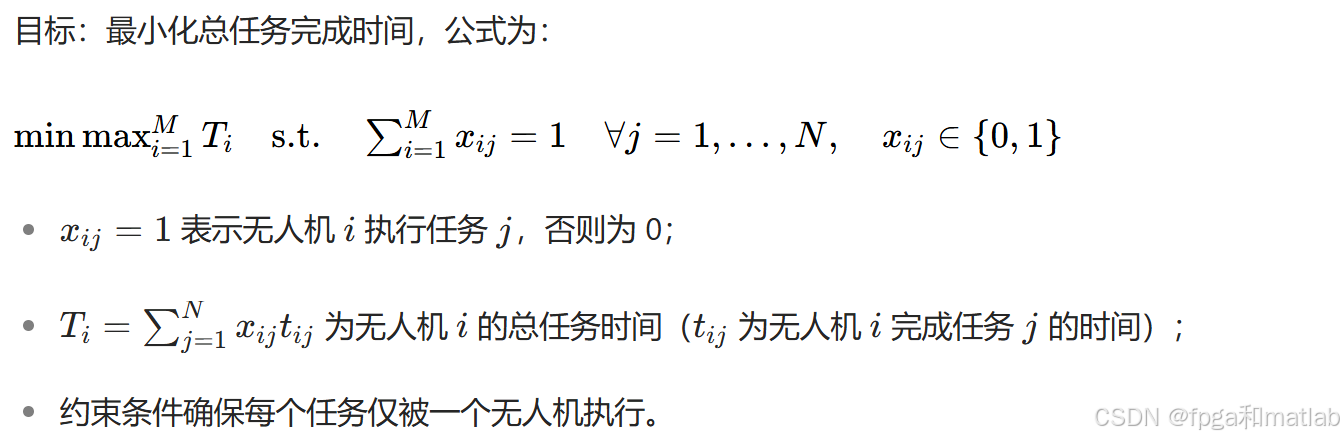
基于整数规划的任务分配
遗传算法适应度函数(任务分配优化)
通过模拟生物进化寻找最优解,适应度函数评估方案优劣:

其中X为任务分配方案(染色体),TotalCost(X)为方案的总代价(时间 + 能耗),适应度越高,方案越优。
6.MATLAB仿真测试
%% 基于强化学习的无人机网络仿真
clear all; close all; clc;%% 参数设置
% 仿真环境参数
area_size = [1000, 1000]; % 区域大小 (m x m)
num_uavs = 7; % 无人机数量
num_users = 30; % 用户数量
sim_time = 100; % 仿真时间 (秒)
time_step = 1; % 时间步长 (秒)
num_steps = sim_time / time_step; % 总步数% 无人机参数
uav_max_speed = 20; % 最大速度 (m/s)
uav_max_accel = 5; % 最大加速度 (m/s^2)
uav_altitude = 100; % 飞行高度 (m)
uav_energy = 1000; % 初始能量 (J)
uav_energy_consumption = 0.1; % 每步能量消耗系数% 通信参数
comm_range = 300; % 通信范围 (m)
bandwidth = 10e6; % 带宽 (Hz)
carrier_freq = 2.4e9; % 载波频率 (Hz)
tx_power = 20; % 发射功率 (dBm)
noise_power = -110; % 噪声功率 (dBm)% 强化学习参数
gamma = 0.99; % 折扣因子
alpha = 0.1; % 学习率
epsilon = 0.1; % 探索率
state_dim = 15; % 状态维度
action_dim = 4; % 动作维度 (上右下左)%% 初始化无人机和用户位置
% 随机初始化无人机位置
uav_pos = zeros(num_uavs, 2);
for i = 1:num_uavsuav_pos(i, :) = [rand() * area_size(1), rand() * area_size(2)];
end% 随机分布用户
user_pos = zeros(num_users, 2);
for i = 1:num_usersuser_pos(i, :) = [rand() * area_size(1), rand() * area_size(2)];
end% 初始化用户关联和信号质量
user_association = zeros(num_users, 1);
user_signal_quality = zeros(num_users, 1);%% 初始化Q表
q_table = zeros(num_uavs, state_dim, action_dim);%% 记录仿真结果
uav_trajectories = zeros(num_uavs, 2, num_steps);
user_coverage_ratio = zeros(num_steps, 1);
system_throughput = zeros(num_steps, 1);
total_energy_consumption = zeros(num_steps, 1);%% 主仿真循环
for step = 1:num_steps% 记录当前位置uav_trajectories(:, :, step) = uav_pos;% 更新用户关联和信号质量for i = 1:num_usersmin_distance = inf;associated_uav = 0;% 计算到所有无人机的距离for j = 1:num_uavsdistance = norm(uav_pos(j, :) - user_pos(i, :));% 检查是否在通信范围内if distance <= comm_range && distance < min_distancemin_distance = distance;associated_uav = j;endend% 更新用户关联和信号质量user_association(i) = associated_uav;if associated_uav > 0% 计算路径损耗和信号质量 (简化模型)path_loss = 20 * log10(distance) + 20 * log10(carrier_freq) - 147.55;signal_power = tx_power - path_loss;snr = signal_power - noise_power;user_signal_quality(i) = 1 / (1 + exp(-0.1 * snr)); % Sigmoid函数映射到[0,1]elseuser_signal_quality(i) = 0;endend% 计算系统性能指标covered_users = sum(user_association > 0);user_coverage_ratio(step) = covered_users / num_users;% 计算系统吞吐量 (简化模型)system_throughput(step) = bandwidth * sum(user_signal_quality) / num_users;% 每个无人机执行动作 (基于强化学习)for i = 1:num_uavs% 获取当前状态state = get_state(i, uav_pos, user_pos, user_association);% 选择动作 (ε-贪心策略)if rand() < epsilonaction = randi(action_dim); % 探索:随机选择动作else[~, action] = max(q_table(i, min(state,state_dim), :)); % 利用:选择Q值最大的动作end% 执行动作并获取奖励[new_pos, reward] = execute_action(i, action, uav_pos, user_pos, user_association, ...uav_max_speed, area_size);% 更新位置uav_pos(i, :) = new_pos;% 获取下一状态next_state = get_state(i, uav_pos, user_pos, user_association);% 更新Q表q_table(i, state, action) = q_table(i, min(state,state_dim), action) + ...alpha * (reward + gamma * max(q_table(i, min(next_state,state_dim), :)) - q_table(i, min(state,state_dim), action));% 记录能量消耗total_energy_consumption(step) = total_energy_consumption(step) + uav_energy_consumption;end% 可视化 (每10步更新一次)if mod(step, 10) == 0 || step == num_stepsvisualize_simulation(uav_pos, user_pos, user_association, step, user_coverage_ratio, system_throughput);drawnow;end
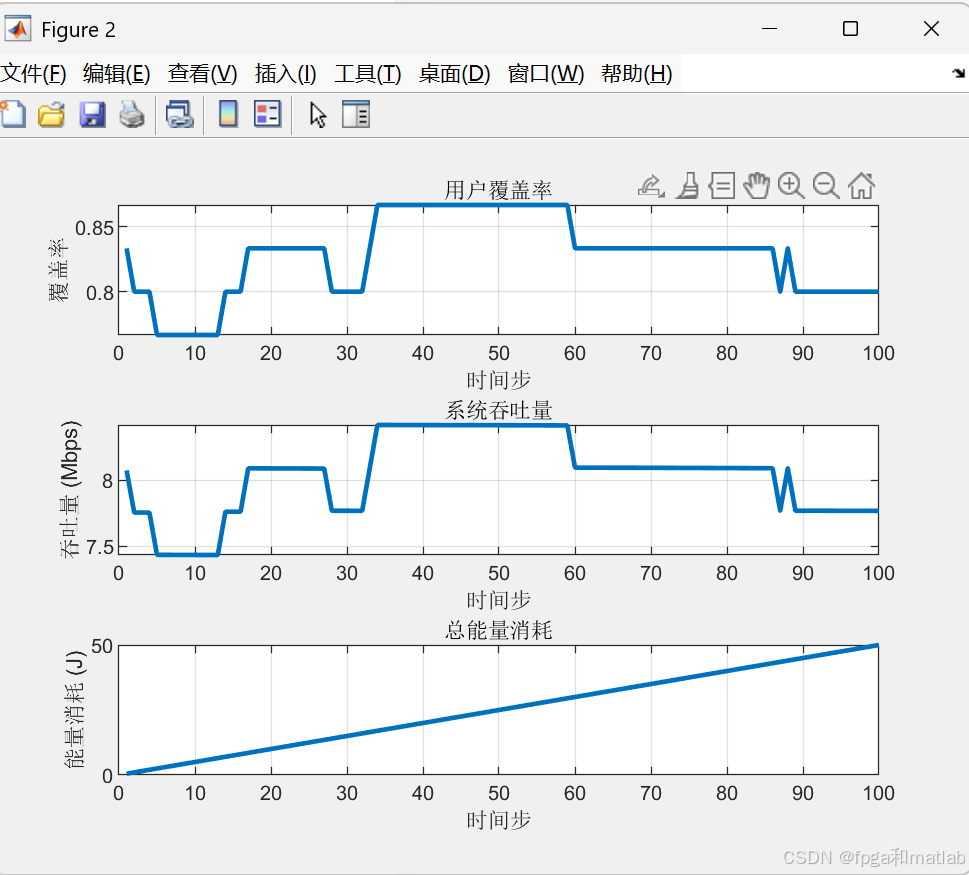
end%% 显示最终结果
figure;
subplot(3,1,1);
plot(1:num_steps, user_coverage_ratio, 'LineWidth', 2);
title('用户覆盖率');
xlabel('时间步');
ylabel('覆盖率');
grid on;subplot(3,1,2);
plot(1:num_steps, system_throughput/1e6, 'LineWidth', 2);
title('系统吞吐量');
xlabel('时间步');
ylabel('吞吐量 (Mbps)');
grid on;subplot(3,1,3);
plot(1:num_steps, cumsum(total_energy_consumption), 'LineWidth', 2);
title('总能量消耗');
xlabel('时间步');
ylabel('能量消耗 (J)');
grid on;%% 辅助函数:获取状态
function state = get_state(uav_idx, uav_pos, user_pos, user_association)% 简化状态:当前无人机位置、周围用户数量和平均距离pos = uav_pos(uav_idx, :);% 计算周围用户数量nearby_users = 0;avg_distance = 0;for i = 1:size(user_pos, 1)if user_association(i) == uav_idxdistance = norm(pos - user_pos(i, :));nearby_users = nearby_users + 1;avg_distance = avg_distance + distance;endendif nearby_users > 0avg_distance = avg_distance / nearby_users;end% 离散化状态x_bin = discretize(pos(1), 5);y_bin = discretize(pos(2), 5);user_bin = discretize(nearby_users, [0, 2, 5, 10, inf]);dist_bin = discretize(avg_distance, [0, 100, 200, 300, inf]);% 组合状态state = x_bin + (y_bin-1)*5 + (user_bin-1)*25 + (dist_bin-1)*125;
end%% 辅助函数:执行动作并获取奖励
function [new_pos, reward] = execute_action(uav_idx, action, uav_pos, user_pos, user_association, max_speed, area_size)pos = uav_pos(uav_idx, :);speed = max_speed * 0.1; % 每次移动的距离% 根据动作决定移动方向switch actioncase 1 % 上new_pos = [pos(1), pos(2) + speed];case 2 % 右new_pos = [pos(1) + speed, pos(2)];case 3 % 下new_pos = [pos(1), pos(2) - speed];case 4 % 左new_pos = [pos(1) - speed, pos(2)];end% 边界检查new_pos(1) = max(0, min(new_pos(1), area_size(1)));new_pos(2) = max(0, min(new_pos(2), area_size(2)));% 计算奖励 (基于覆盖用户数量变化)old_covered = sum(user_association == uav_idx);% 模拟新的用户关联 (简化计算)new_association = user_association;for i = 1:size(user_pos, 1)if user_association(i) == uav_idx% 当前关联用户,检查是否仍在范围内distance = norm(new_pos - user_pos(i, :));if distance > 300new_association(i) = 0;endelse% 未关联用户,检查是否可以关联到当前无人机if user_association(i) == 0distance = norm(new_pos - user_pos(i, :));if distance <= 300new_association(i) = uav_idx;endendendendnew_covered = sum(new_association == uav_idx);% 奖励 = 覆盖用户数量变化 - 移动惩罚reward = (new_covered - old_covered) - 0.1;
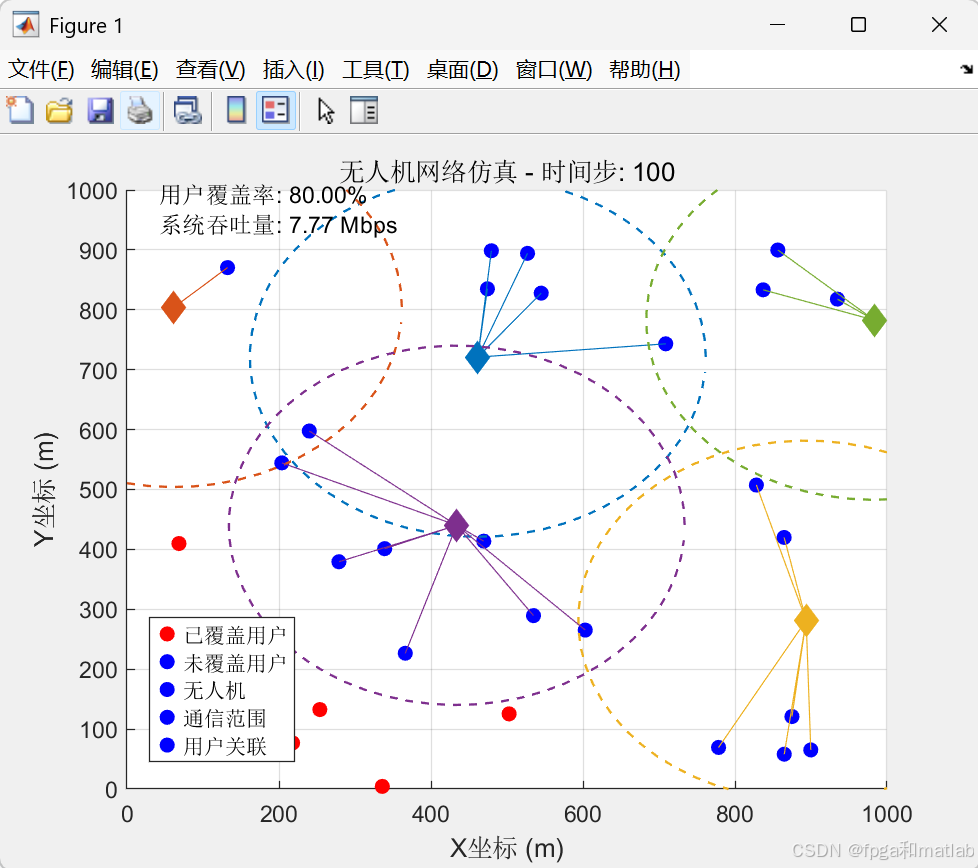
end%% 辅助函数:可视化仿真
function visualize_simulation(uav_pos, user_pos, user_association, step, coverage_ratio, throughput)figure(1);clf;% 绘制用户hold on;for i = 1:size(user_pos, 1)if user_association(i) > 0plot(user_pos(i,1), user_pos(i,2), 'bo', 'MarkerFaceColor', 'b', 'MarkerSize', 6);elseplot(user_pos(i,1), user_pos(i,2), 'ro', 'MarkerFaceColor', 'r', 'MarkerSize', 6);endend% 绘制无人机colors = lines(size(uav_pos, 1));for i = 1:size(uav_pos, 1)plot(uav_pos(i,1), uav_pos(i,2), 'd', 'Color', colors(i,:), 'MarkerSize', 10, 'MarkerFaceColor', colors(i,:));% 绘制通信范围theta = 0:0.1:2*pi;x = uav_pos(i,1) + 300 * cos(theta);y = uav_pos(i,2) + 300 * sin(theta);plot(x, y, 'Color', colors(i,:), 'LineWidth', 1, 'LineStyle', '--');% 绘制用户关联associated_users = find(user_association == i);for j = 1:length(associated_users)line([uav_pos(i,1), user_pos(associated_users(j),1)], ...[uav_pos(i,2), user_pos(associated_users(j),2)], ...'Color', colors(i,:), 'LineWidth', 0.5);endend% 添加标题和标签title(sprintf('无人机网络仿真 - 时间步: %d', step));xlabel('X坐标 (m)');ylabel('Y坐标 (m)');xlim([0, 1000]);ylim([0, 1000]);grid on;% 添加性能指标annotation('textbox', [0.15, 0.85, 0.3, 0.1], 'String', {sprintf('用户覆盖率: %.2f%%', coverage_ratio(step)*100);sprintf('系统吞吐量: %.2f Mbps', throughput(step)/1e6)}, 'EdgeColor', 'none');% 图例legend('已覆盖用户', '未覆盖用户', '无人机', '通信范围', '用户关联', 'Location', 'best');
end 测试结果如下:















)
:Memory)


