目录
前言
一、光流估计的核心原理
二、光流估计的计算流程
1. 特征提取:找到 “好跟踪” 的点
2. 光流计算:匹配帧间特征点
三、完整实现步骤(附代码)
1. 环境准备
2. 步骤 1:处理视频第一帧
3. 步骤 2:提取第一帧的特征点(角点)
4. 步骤 3:创建轨迹掩膜与颜色
5. 步骤 4:配置光流计算参数
6. 步骤 5:主循环 —— 跟踪特征点并绘制轨迹
7. 步骤 6:释放资源
五、总结
前言
在计算机视觉领域,运动目标跟踪是核心任务之一,而光流估计则是实现该任务的经典技术。它通过捕捉连续图像帧间像素的运动向量,让我们直观地 “看到” 物体的运动轨迹。本文将从原理到代码,手把手教你用 OpenCV 实现基于 Lucas-Kanade 金字塔光流的运动轨迹绘制,适合有基础 OpenCV 知识的开发者进阶学习。
一、光流估计的核心原理
光流估计并非凭空计算,其准确性依赖三个关键假设,这也是所有传统光流算法的理论基石:
1.亮度恒定假设
同一物体的像素亮度在连续帧间保持不变。这意味着,物体运动是帧间像素变化的唯一原因,排除了光照突变、物体反光等干扰因素(实际应用中需尽量控制光照环境)。
2. 小运动假设
物体在相邻两帧间的位移极小,不会出现 “瞬移” 情况。只有满足这一假设,才能通过像素灰度对位置的偏导数,近似计算像素的运动速度。
3. 空间一致性假设
场景中相邻的像素点,投影到图像平面后仍保持相邻关系,且这些相邻点属于同一物体,运动方向和速度一致。这一假设避免了孤立像素的异常运动对整体轨迹的干扰。
二、光流估计的计算流程
要实现运动轨迹绘制,需先明确光流估计的核心步骤 ——特征提取与光流计算,二者相辅相成:
1. 特征提取:找到 “好跟踪” 的点
光流计算无需跟踪所有像素,只需聚焦于易识别、易匹配的特征点(如角点、边缘)。这类点的灰度梯度大,在帧间变化中具有唯一性,跟踪稳定性更高。
OpenCV 中常用cv2.goodFeaturesToTrack()函数提取角点,该函数能过滤低质量点、避免点过于密集,为后续光流计算提供可靠输入。
2. 光流计算:匹配帧间特征点
拿到特征点后,需计算其在相邻帧间的运动向量。常用算法包括:
- Lucas-Kanade 算法:稀疏光流算法,仅计算特征点的光流,速度快、适合实时场景;
- Horn-Schunck 算法:稠密光流算法,计算所有像素的光流,精度高但速度慢;
- 金字塔 Lucas-Kanade 算法:本文使用的优化版本,通过构建图像金字塔,解决了 “大位移” 场景下的跟踪失效问题,兼顾速度与精度(对应 OpenCV 函数
cv2.calcOpticalFlowPyrLK())。
三、完整实现步骤(附代码)
结合上述原理,运动轨迹绘制的整体逻辑为:读取视频→提取首帧特征点→创建轨迹掩膜→循环跟踪特征点并绘制轨迹→显示结果。下面分步骤拆解实现细节。
1. 环境准备
首先确保安装 OpenCV 和 NumPy(若未安装,执行以下命令):
pip install opencv-python numpy2. 步骤 1:处理视频第一帧
视频跟踪的起点是第一帧,需先读取第一帧并转换为灰度图(光流计算仅需单通道,减少计算量):
import cv2
import numpy as np# 1. 读取视频(替换为你的视频路径,支持avi/mp4格式)
cap = cv2.VideoCapture("test.avi") # 示例视频路径,需根据实际修改# 2. 读取第一帧,判断是否读取成功
ret, old_frame = cap.read()
if not ret:print("视频读取失败!请检查文件路径或视频格式。")cap.release() # 释放视频资源exit()# 3. 将第一帧转换为灰度图(光流计算需灰度图输入)
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)3. 步骤 2:提取第一帧的特征点(角点)
使用cv2.goodFeaturesToTrack()提取高质量角点,参数需根据实际场景调整:
# 定义特征点检测参数
feature_params = dict(maxCorners=100, # 最多提取100个角点(避免轨迹过多导致画面杂乱)qualityLevel=0.3, # 角点质量阈值:仅保留质量≥最强角点质量×0.3的点minDistance=7 # 角点间最小欧氏距离:避免角点过于密集
)# 提取第一帧的角点(mask=None表示全图检测,无区域限制)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
# p0形状:(-1, 1, 2),即(角点数量,1,(x,y)坐标),例如(50,1,2)表示50个角点4. 步骤 3:创建轨迹掩膜与颜色
为了不破坏原始视频帧,我们创建一个全零掩膜(与视频帧尺寸相同),专门用于绘制轨迹;同时为每个特征点分配随机颜色,便于区分不同轨迹:
# 创建与视频帧尺寸、通道数相同的全零掩膜(初始为黑色,后续绘制彩色轨迹)
mask = np.zeros_like(old_frame)# 为每个特征点生成随机RGB颜色(100个点×3通道,取值0-255)
color = np.random.randint(0, 255, (100, 3)) # 颜色数量与maxCorners一致5. 步骤 4:配置光流计算参数
使用cv2.calcOpticalFlowPyrLK()前,需定义其参数,控制跟踪精度与速度:
# Lucas-Kanade金字塔光流参数
lk_params = dict(winSize=(15, 15), # 搜索窗口大小:窗口越大,跟踪范围越广,但速度越慢maxLevel=2, # 金字塔最大层级:2表示使用原始图+2层下采样图,解决大位移问题criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)# 迭代终止条件:迭代10次或误差小于0.03时停止,平衡精度与速度
)6. 步骤 5:主循环 —— 跟踪特征点并绘制轨迹
这是核心环节:循环读取每一帧,计算光流、筛选有效特征点、绘制轨迹,并更新 “上一帧” 数据用于下次计算。
while True:# 1. 读取当前帧ret, frame = cap.read()if not ret: # 若读取失败(如视频结束),退出循环break# 2. 将当前帧转换为灰度图frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 3. 计算光流:匹配上一帧特征点(p0)在当前帧的位置# p1:当前帧特征点坐标;st:跟踪状态(1=成功,0=失败);err:跟踪误差p1, st, err = cv2.calcOpticalFlowPyrLK(prevImg=old_gray, # 上一帧灰度图nextImg=frame_gray, # 当前帧灰度图prevPts=p0, # 上一帧特征点nextPts=None, # 输出当前帧特征点(设为None自动分配)**lk_params # 光流参数)# 4. 筛选跟踪成功的特征点(仅保留st=1的点)good_new = p1[st == 1] # 当前帧有效特征点good_old = p0[st == 1] # 上一帧对应有效特征点# 5. 绘制轨迹:在掩膜上连接“上一帧点”与“当前帧点”for i, (new, old) in enumerate(zip(good_new, good_old)):# 提取坐标并转换为整数(像素坐标需为整数)x_new, y_new = new.ravel() # ravel()将数组展平为一维x_old, y_old = old.ravel()# 转换为整数(避免绘图时因浮点数报错)x_new, y_new, x_old, y_old = map(int, [x_new, y_new, x_old, y_old])# 在掩膜上绘制线段:连接上一帧点与当前帧点mask = cv2.line(img=mask, # 绘制目标:掩膜pt1=(x_new, y_new),# 当前帧点pt2=(x_old, y_old),# 上一帧点color=color[i].tolist(), # 轨迹颜色(与特征点对应)thickness=2 # 线段粗细)# 6. 生成最终图像:将掩膜(轨迹)叠加到原始帧上result = cv2.add(frame, mask) # 图像叠加,轨迹覆盖在视频上# 7. 显示结果cv2.imshow("Motion Trajectory", result) # 显示带轨迹的视频cv2.imshow("Mask Only", mask) # 单独显示轨迹掩膜(可选)# 8. 按键控制:按下Esc键(ASCII码27)退出循环k = cv2.waitKey(30) & 0xFF # 等待30ms(控制视频播放速度)if k == 27:break# 9. 更新“上一帧”数据:为下一循环做准备old_gray = frame_gray.copy() # 上一帧灰度图更新为当前帧p0 = good_new.reshape(-1, 1, 2) # 上一帧特征点更新为当前帧有效点(调整形状)7. 步骤 6:释放资源
循环结束后,需释放视频捕获对象与销毁 OpenCV 窗口,避免内存泄漏:
# 释放视频资源
cap.release()
# 销毁所有OpenCV窗口
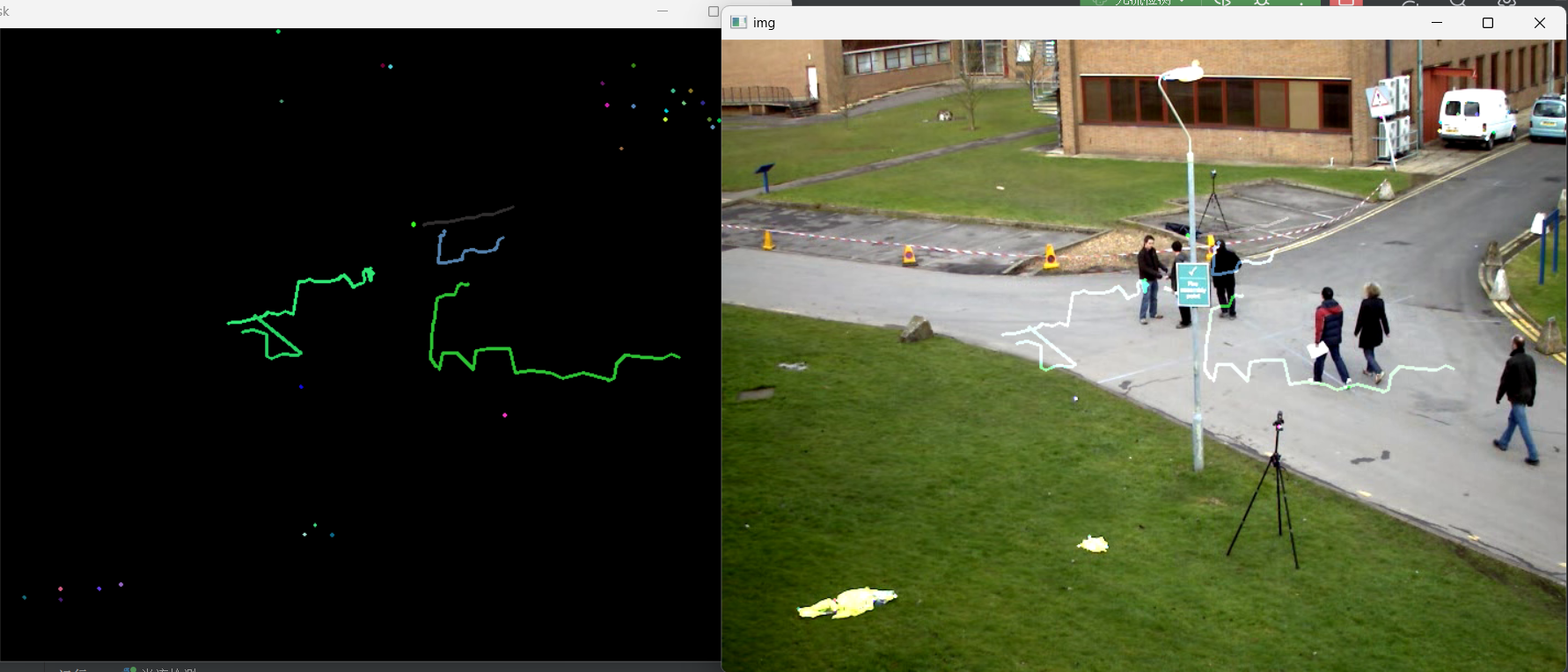
cv2.destroyAllWindows()运行结果如下:为一个视频检测人们的运动轨迹
五、总结
本文通过 OpenCV 实现了基于 Lucas-Kanade 金字塔光流的运动轨迹绘制,核心逻辑是 “提取特征点→跟踪特征点→绘制帧间连线”。该方法兼顾实时性与精度,适用于摄像头监控、车辆跟踪、机器人视觉等场景。
掌握光流估计后,可进一步探索更复杂的应用,如结合目标检测(如 YOLO)实现特定物体的轨迹跟踪,或使用稠密光流算法(如cv2.calcOpticalFlowFarneback())获取全像素运动信息。
希望本文能帮助你理解光流估计的实践逻辑,动手尝试调整参数,感受不同场景下的轨迹绘制效果吧!






--Java版)


)









