一个空间中点到像素平面转换,需要经过
1. 空间坐标系转换到相机坐标系
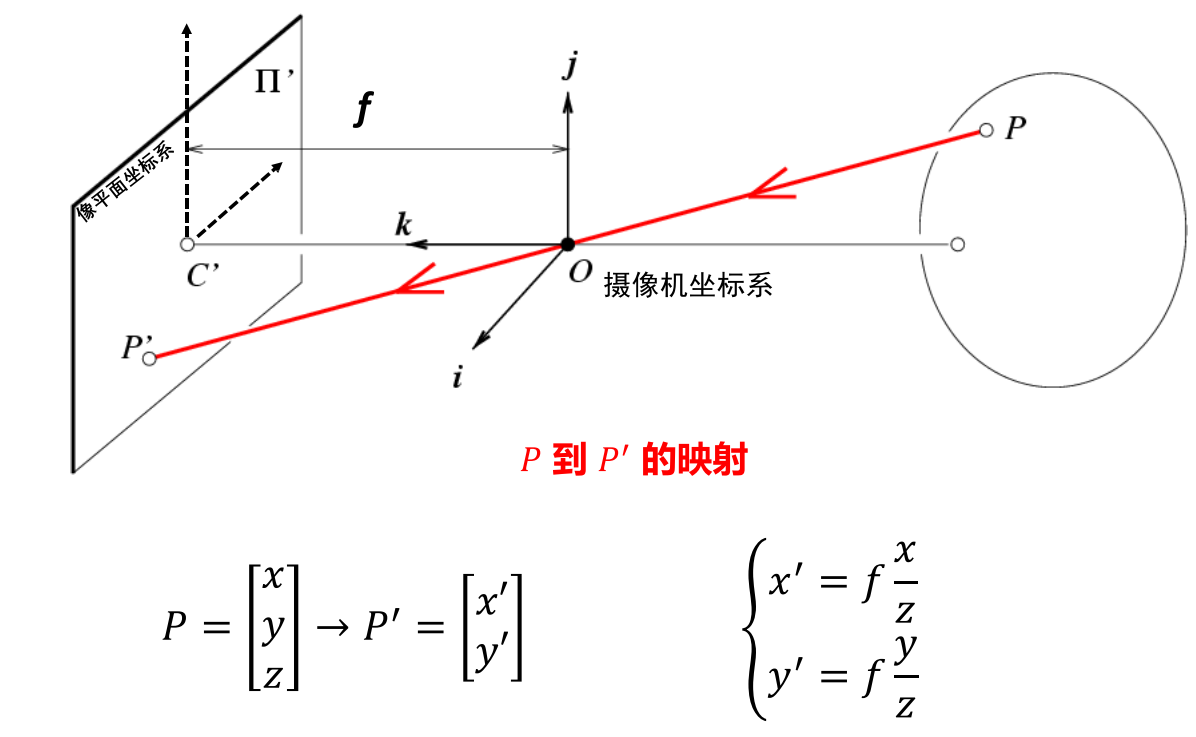
2. 相机坐标系下3D点到相机平面转换
3. 相机平面到像素平面转换
相机三维空间到像素平面转换
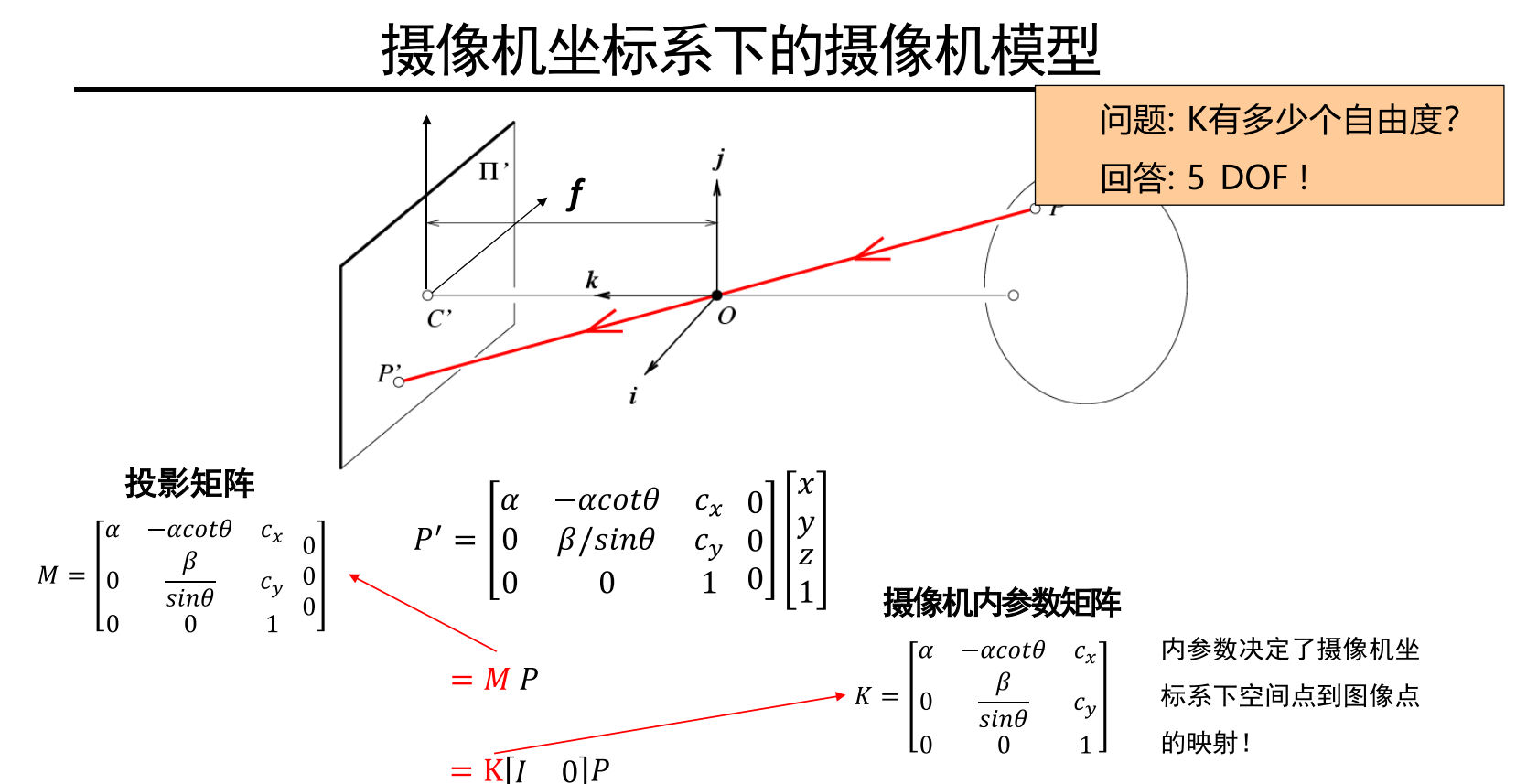
1. 3D点到相机平面转换
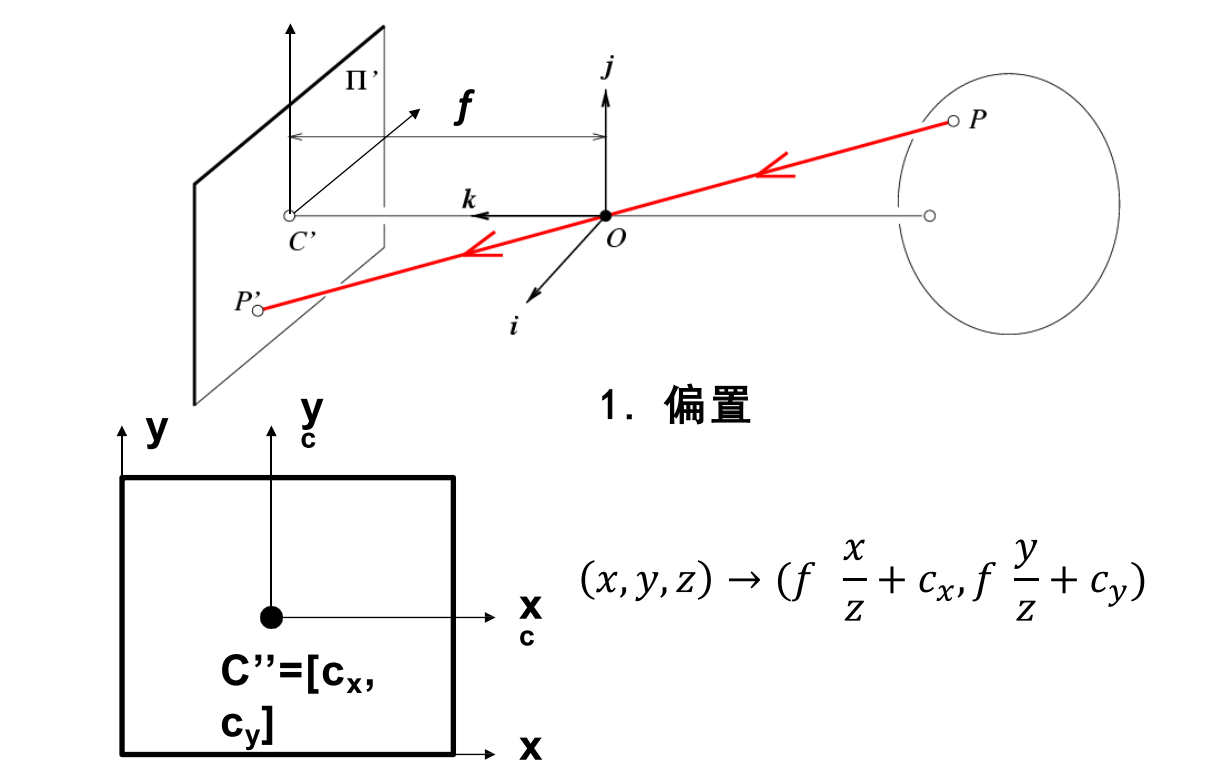
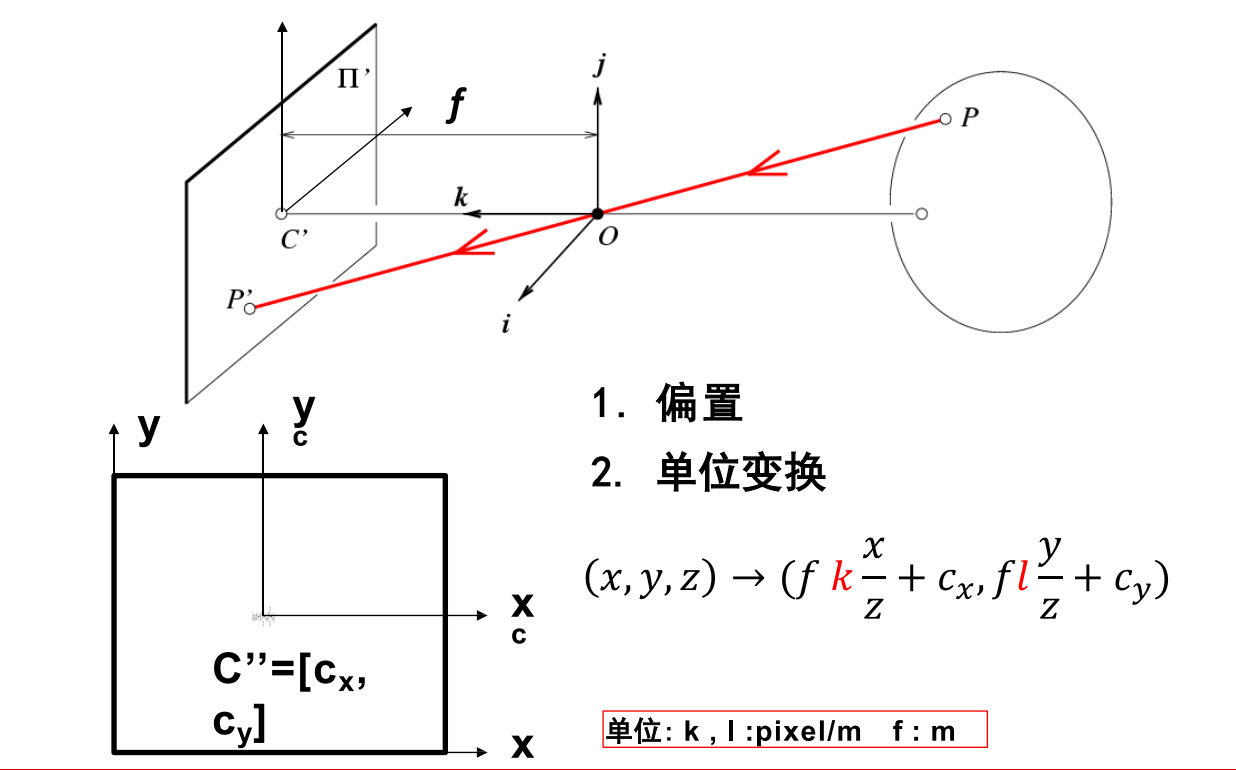
2. 相机平面到像素平面转换
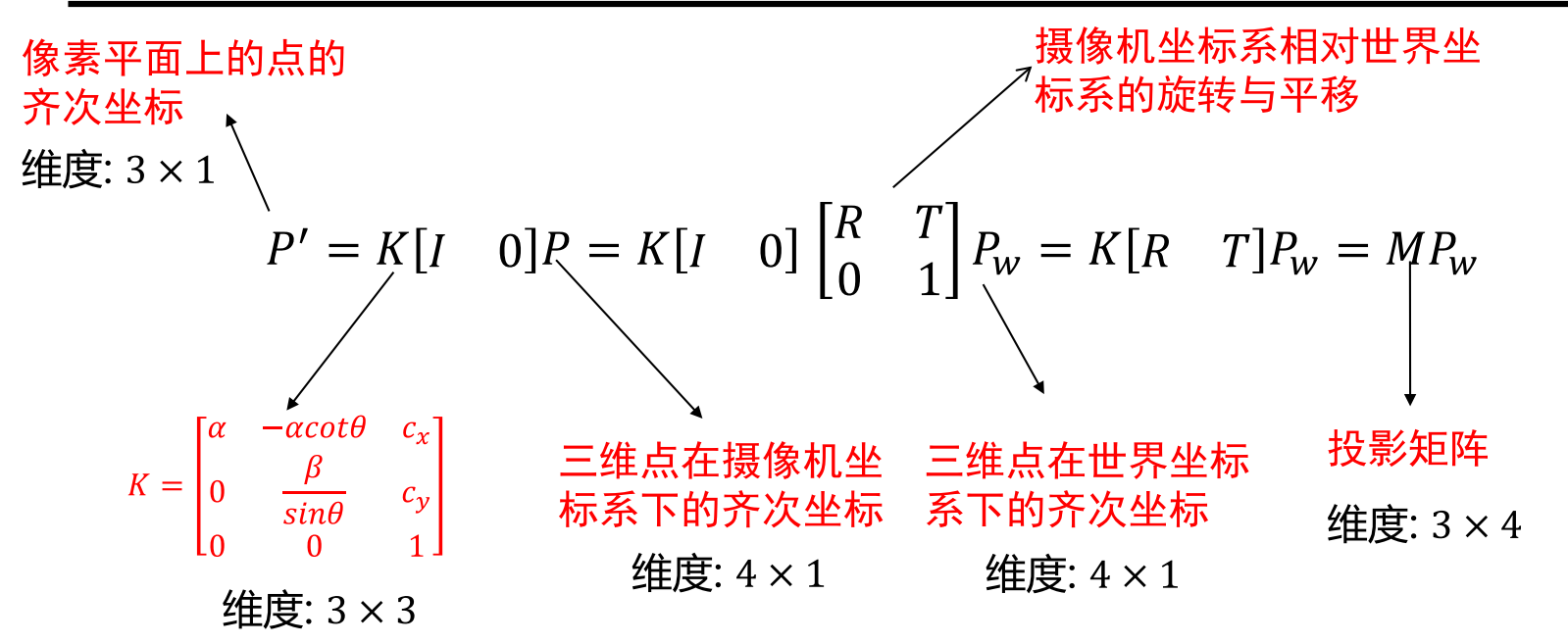
涉及到单位的转换,和像素原点到相机平面原点的转换
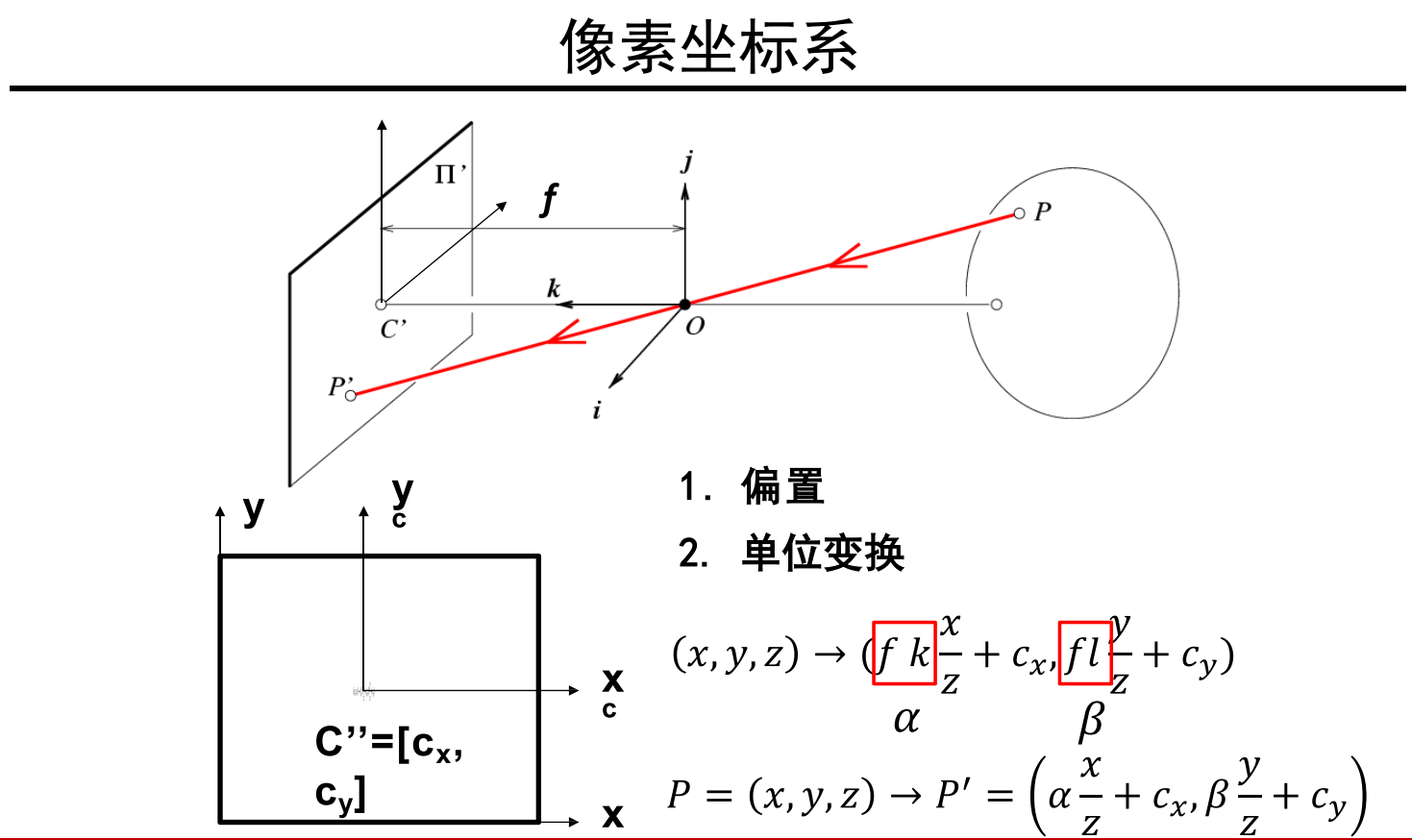
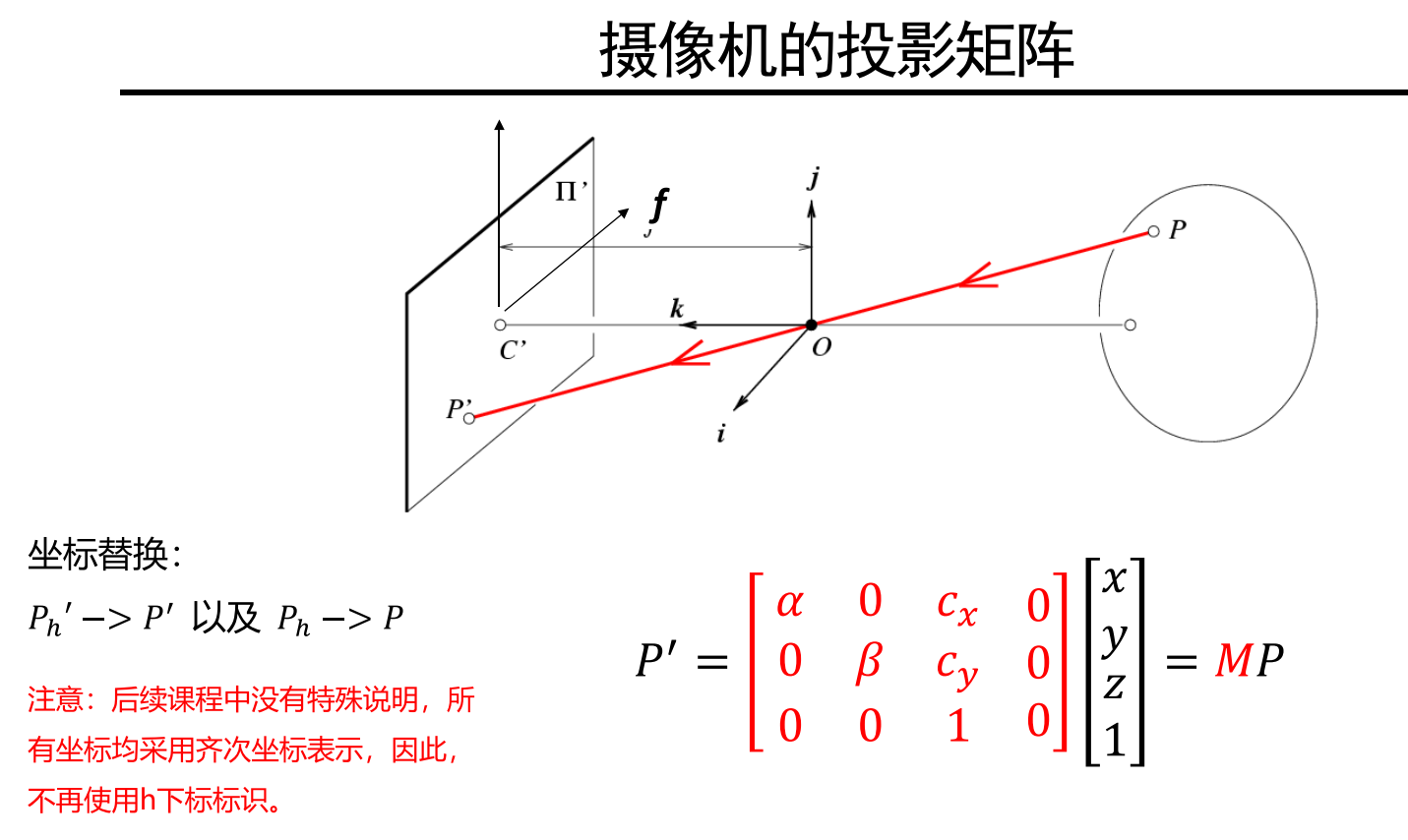
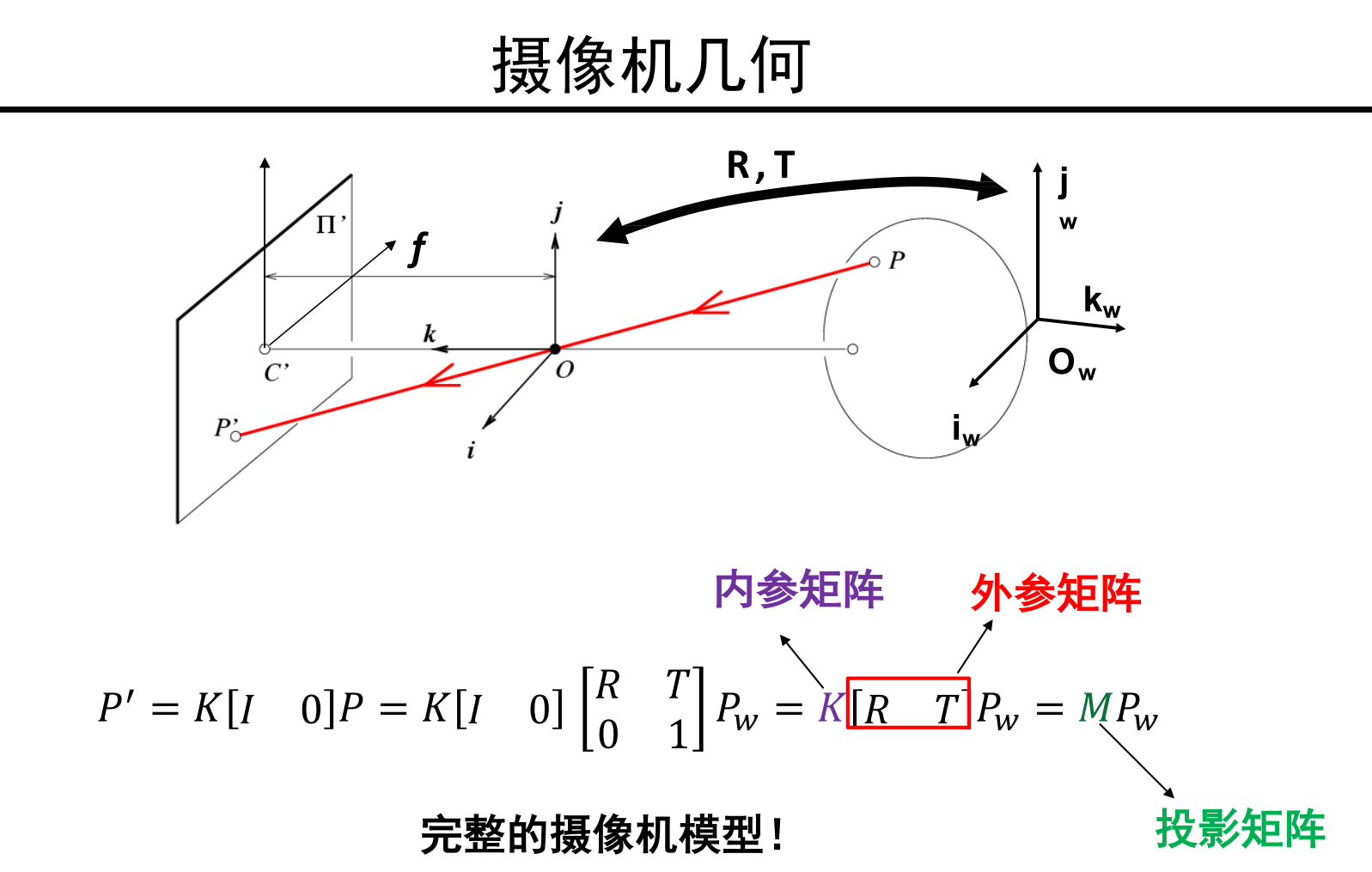
为了方便表示与计算,使用齐次坐标的形式
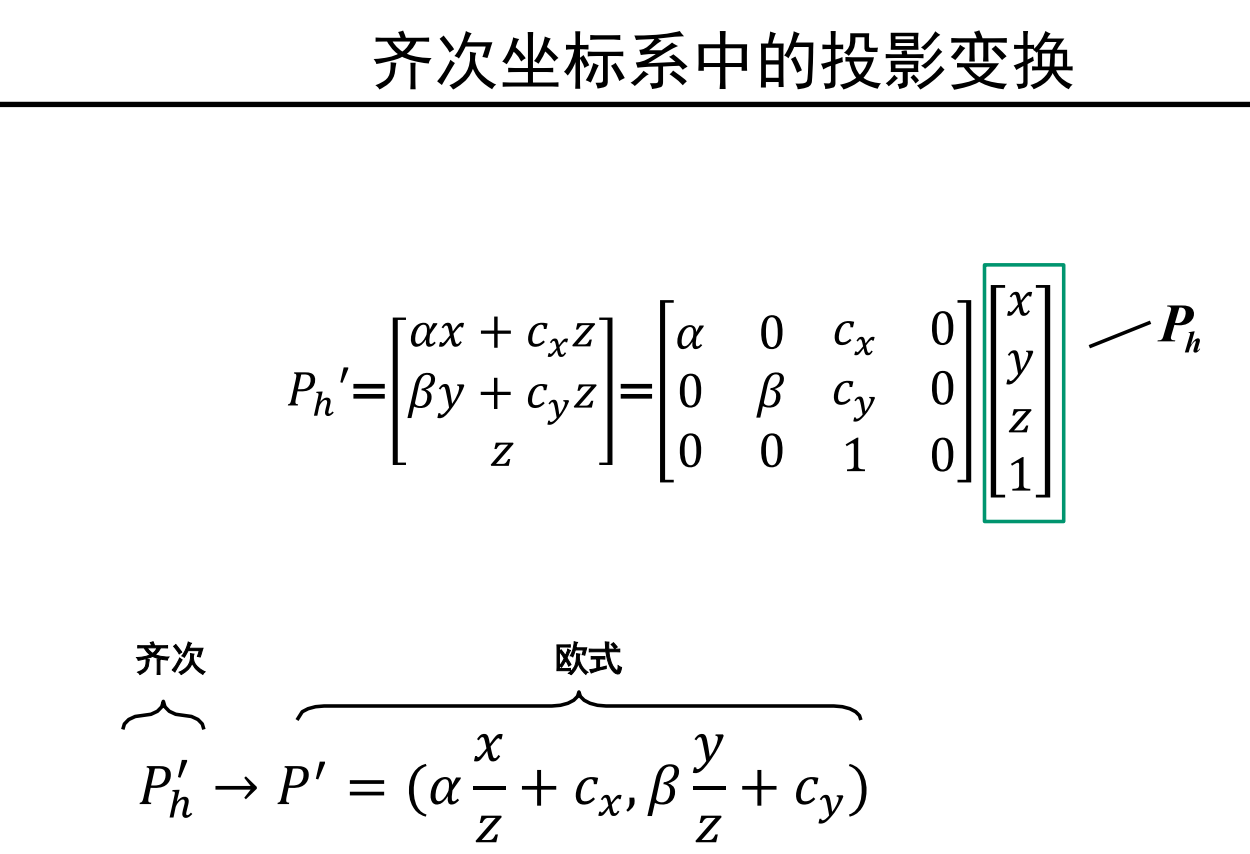
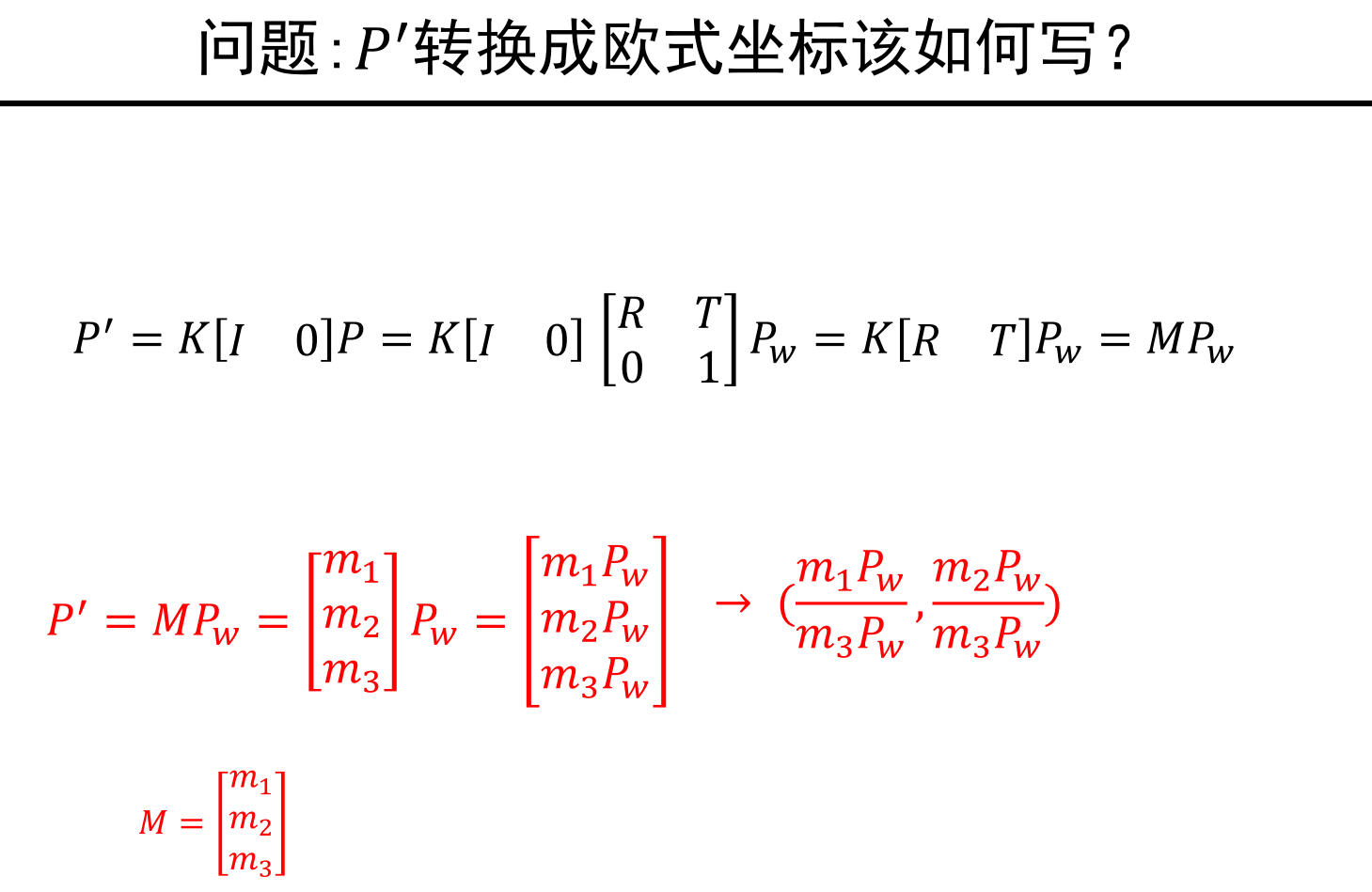
得到投影矩阵M, P是相机空间中坐标, M投影矩阵,p_1 投影
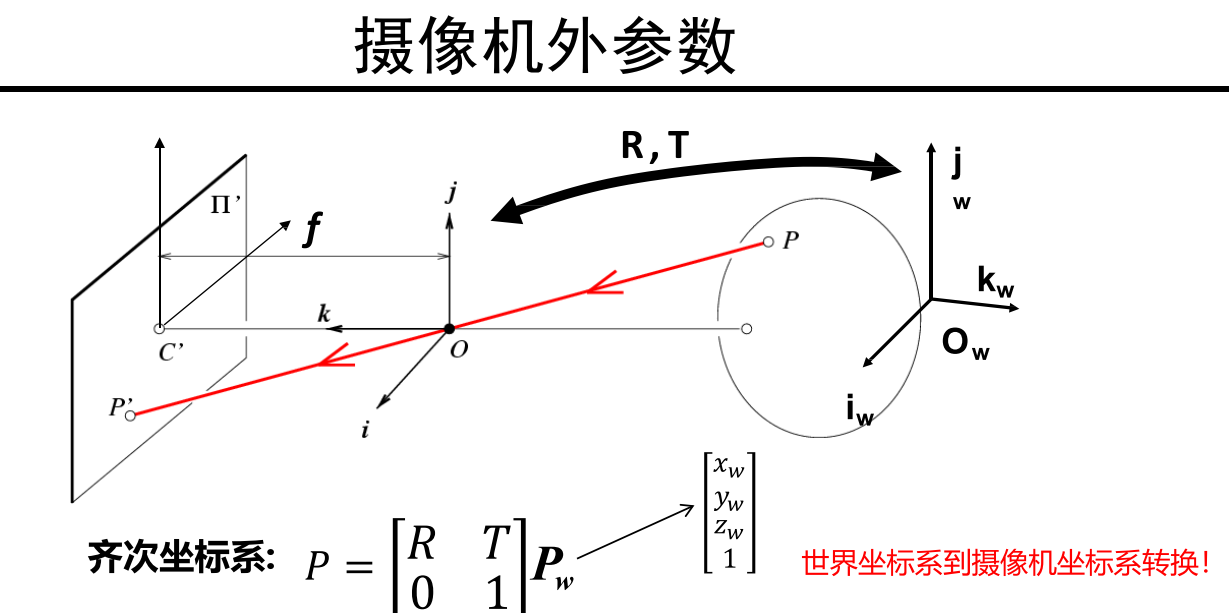
世界坐标系到相机坐标系转换
需要经过 旋转和平移,
一个空间中点到像素平面转换,需要经过
1. 空间坐标系转换到相机坐标系
2. 相机坐标系下3D点到相机平面转换
3. 相机平面到像素平面转换
1. 3D点到相机平面转换
2. 相机平面到像素平面转换
涉及到单位的转换,和像素原点到相机平面原点的转换
为了方便表示与计算,使用齐次坐标的形式
得到投影矩阵M, P是相机空间中坐标, M投影矩阵,p_1 投影
需要经过 旋转和平移,
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.pswp.cn/bicheng/98193.shtml 繁体地址,请注明出处:http://hk.pswp.cn/bicheng/98193.shtml 英文地址,请注明出处:http://en.pswp.cn/bicheng/98193.shtml
如若内容造成侵权/违法违规/事实不符,请联系英文站点网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!









![[vue.js] 树形结点多选框选择](http://pic.xiahunao.cn/[vue.js] 树形结点多选框选择)


—外部中断EXTI)





