阅读 WiscKey 论文时随手记录一些笔记。
这篇论文的核心思想理解起来还是很简单的,但是具体涉及到实现还有一些想不明白的地方,后来看到 TiKV 的 Titan 实现也很有趣,索性把这些问题都记录下来并抛出来。
本文中和论文相关的内容,斜体均为我个人的主观想法,关于 Titan 的实现,我只看过几篇公开文章以及粗浅的扫过一遍代码,如果这两部分的内容有理解错误欢迎指出,感谢!
背景
基于 LSM 树(Log-Structured Merge-Trees)的键值存储已经广泛应用,其特点是保持了数据的顺序写入和存储,利用磁盘的顺序 IO 得到了很高的性能(在 HDD 上尤其显著)。但是同一份数据会在生命周期中写入多次,随之带来高额的写放大。
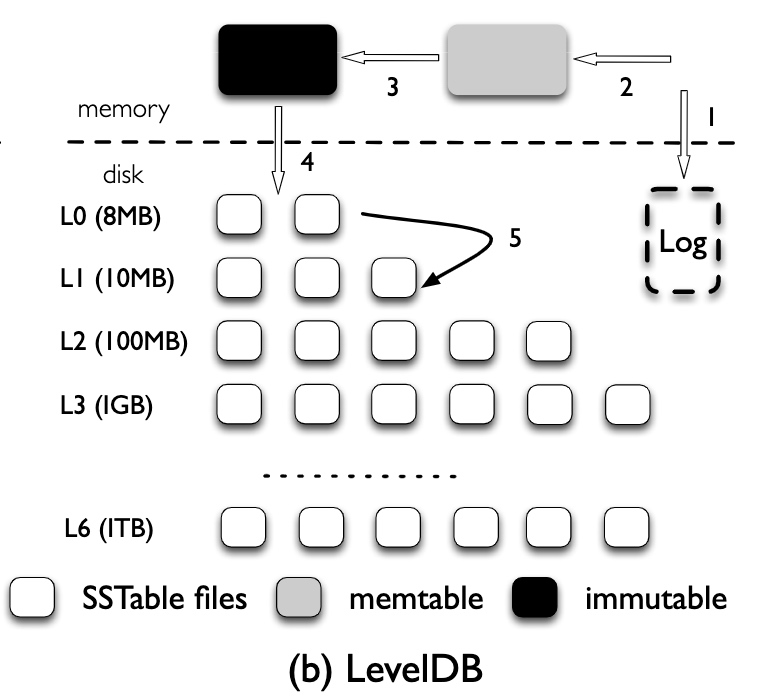
以 LevelDB 为例,数据写入的整个流程为:
- 数据首先会被写入 memtable 和 WAL
- 当 memtable 达到上限后,会转换为 immutable memtable,之后持久化到 L0(称为 flush),L0 中每个文件都是一个持久化的 immutable memtable,多个文件间可以有相互重叠的 Key
- 当 L0 中的文件达到一定数量时,便会和 L1 中的文件进行合并(称为 compaction)
- 自 L1 开始所有文件都不会再有相互重叠的 Key,并且每个文件都会按照 Key 的顺序存储。每一层通常是上一层大小的 10 倍,当一层的大小超过限制时,就会挑选一部分文件合并到下一层
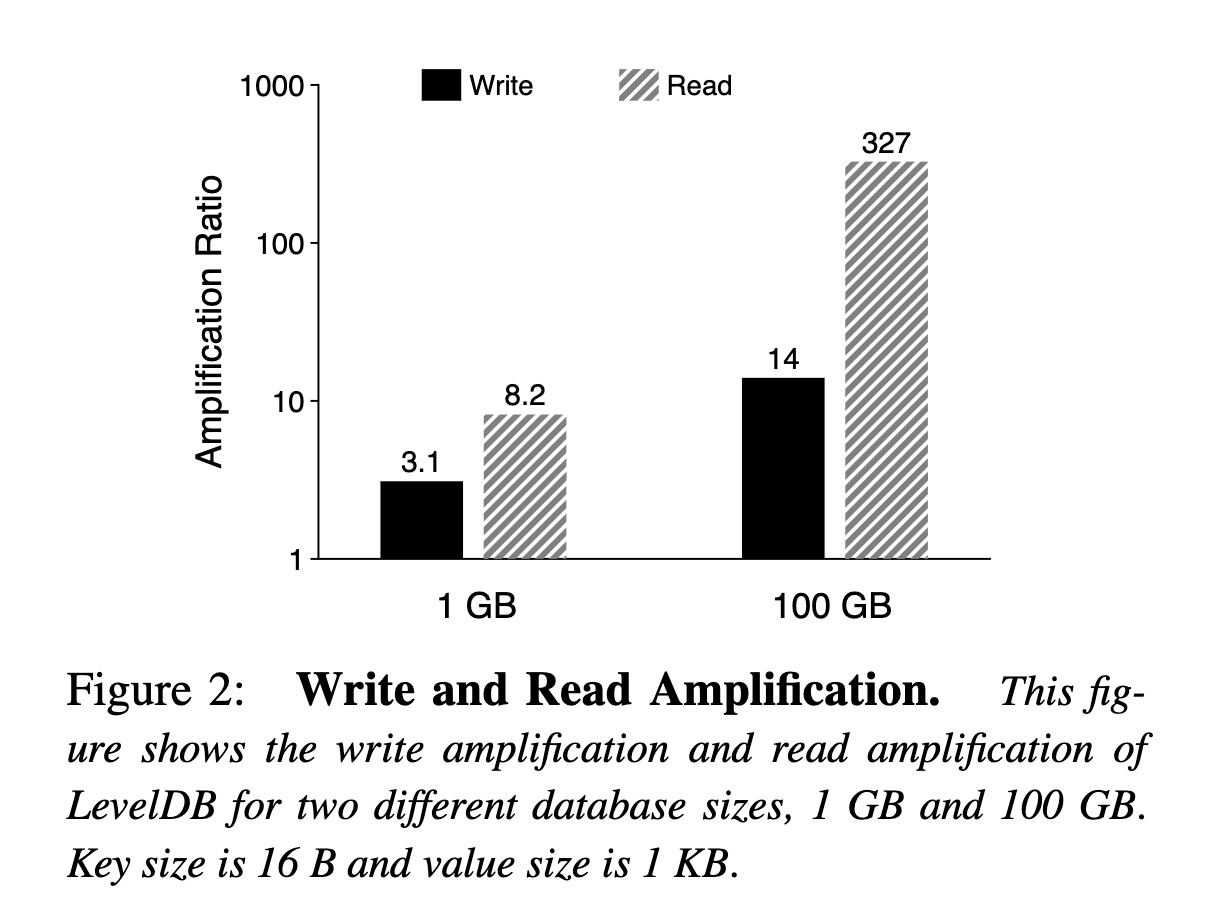
由此可以计算出 LevelDB 的写放大比率:
- 由于每一层是上一层大小的 10 倍,所以在最坏情况下,上一层的一个文件可能需要和下一层的十个文件进行合并,所以合并的写放大是 10
- 假设每行数据经过一系列 compaction 最终都会落入最终层,每层都需要重新写一次,那么从 L1 到 L6 的写放大为 5
- 加上 WAL 和 L0,最终写放大可能会超过 50
另一方面,由于数据在 LevelDB 中的每一层(memtable/L0/L1~L6)都有可能存在,所以对于读请求,也会有一定的读放大:
- 由于 L0 的多个文件允许有数据重叠,所以最坏情况需要查询所有文件
- 对于 L1 到 L6,因为数据有序且不重叠,所以每层需要查询一个文件
- 为了确认 Key 是否存在,对于每个文件都需要读取 index block、bloom-filter blocks 和 data block
论文中提供了一个实际的数据:
WiscKey 介绍
设计目标
WiscKey 的核心思想是将数据中的 Key 和 Value 分离,只在 LSM-Tree 中有序存储 Key,而将 Value 存放在单独的 Log 中。这样带来了两点好处:
- 当 LSM-Tree 进行 compaction 时,只会对 Key 进行排序和重写,不会影响到没有改变的 Value,也就显著降低了写放大
- 将 Value 分离后,LSM-Tree 本身会大幅减小,所以对应磁盘中的层级会更少,可以减少查询时从磁盘读取的次数,并且可以更好的利用缓存的效果
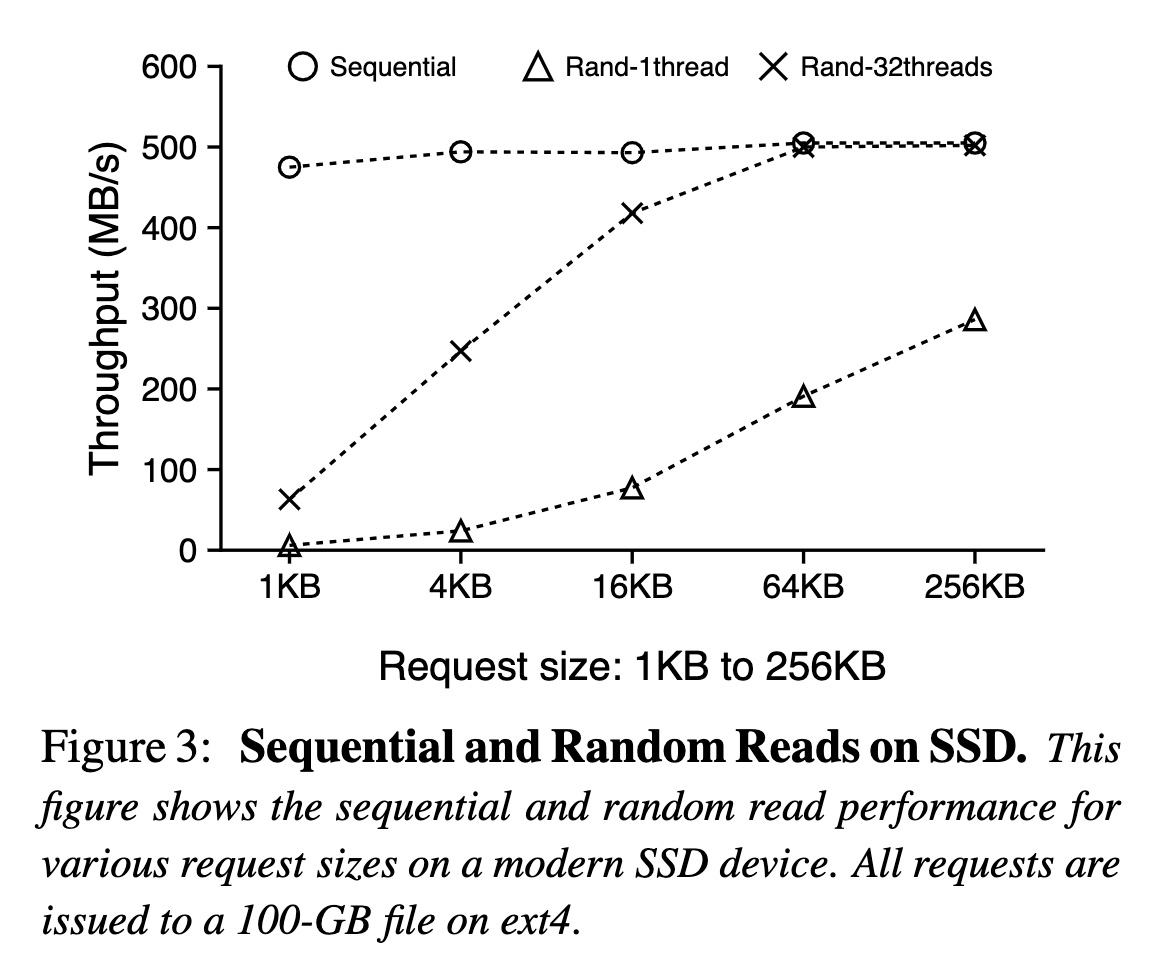
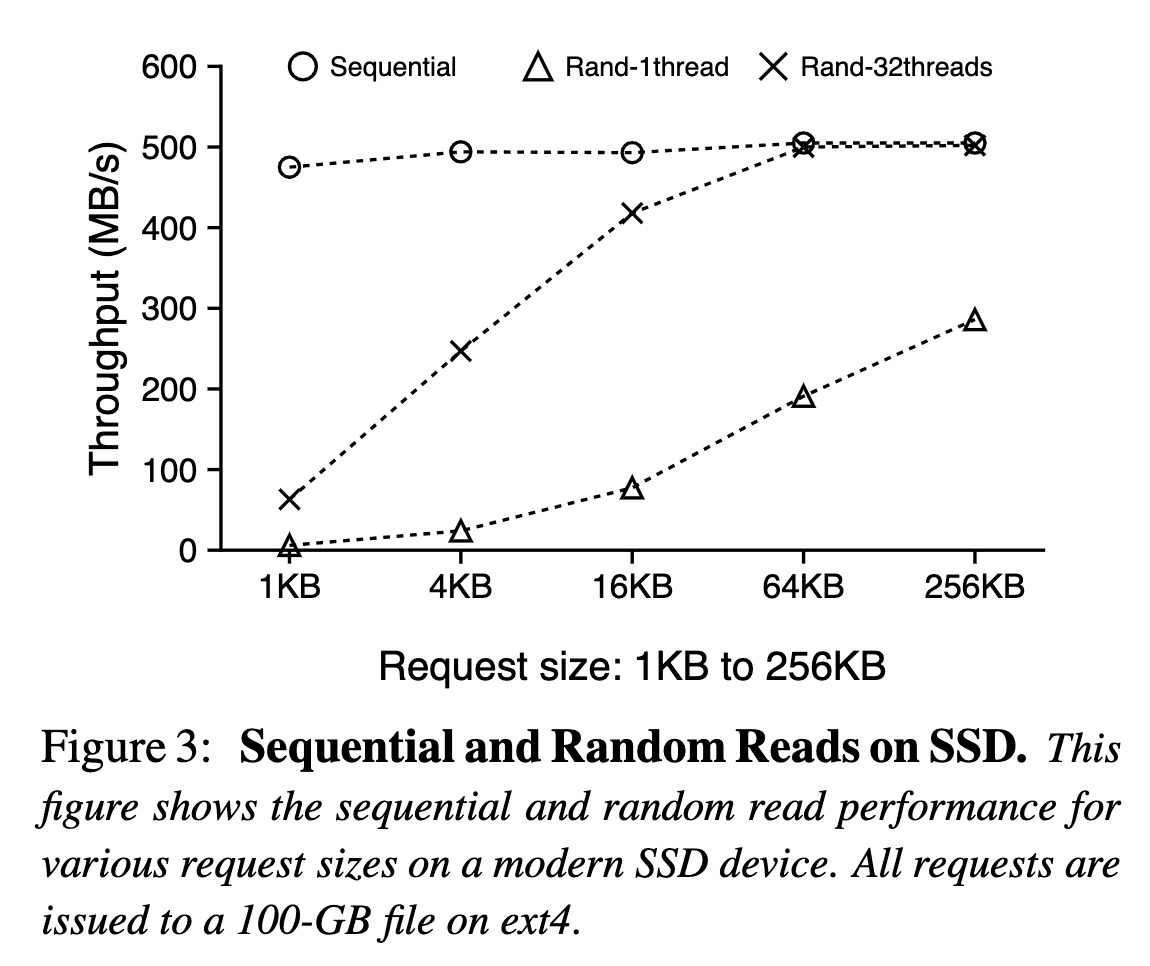
另外,WiscKey 的设计很大一部分还建立在 SSD 的普及上,相比 HDD,SSD 有一些变化:
- SSD 的随机 IO 和顺序 IO 的性能差距并不像 HDD 那么大,所以 LSM-Tree 为了避免随机 IO 而采用了大量的顺序 IO,反而可能会造成了带宽浪费
- SSD 拥有内部并行性,但 LSM-Tree 并没有利用到该特性
- SSD 会因为大量的重复写入而产生硬件损耗,LSM-Tree 的高写入放大率会降低设备的寿命
下图展示了在不同请求大小和并发度时,随机读和顺序读的吞吐量,可以看到在请求大于 16KB 时,32 线程的随机读已经接近了顺序读的吞吐:
实现
在 LSM-Tree 的基础上,WiscKey 引入了一个额外的存储用于存储分离出的值,称为 Value Log。整体的读写路径为:
- 当用户添加一个 KV 时,WiscKey 会先将 Value 写入到 Value-Log 中(顺序写),然后将 Key 和 Value 在 Value Log 中的地址写入 LSM-Tree
- 当用户删除一个 Key 时,仅在 LSM-Tree 中删除 Key 的记录,之后通过 GC 清理掉 Value Log 中的数据
- 当用户查询一个 Key 时,会先从 LSM-Tree 中查询到 Value 的地址,再根据地址将 Value 真正从 Value-Log 中读取出来(随机读)
假设 Key 的大小为 16 Bytes,Value 的大小为 1KB,优化后的效果为:
- 如果在 LSM-Tree 中的单层的写放大率是 10,那么使用 WiscKey 后单层的写放大率将变为 ((16 x 10) + (1024 x 1)) / (16 + 1024) = 1.14,远小于之前的 10 倍
- 如果一个标准的 LSM-Tree 的大小为 100G,那么将 Value 分离后 LSM-Tree 本身的大小将会减少到 2G,层级会减少 1~2 级,并且缓存到内存中的比例会更高,从而降低读放大
看上去实现很简单,效果也很好,但是背后也存在了一些挑战和优化。
挑战一:范围查询
在标准的 LSM-Tree 中,由于 Key 和 Value 是按照顺序存储在一起的,所以范围查询只需要顺序读即可遍历整个 SSTable 的所有数据。但是在 WiscKey 中,每个 Key 都需要额外的一次随机读才能读取到对应的 Value,因此效率会很差。
论文中的解决方案是利用上文中所提到的 SSD 内部的并行能力。WiscKey 内部会有一个 32 线程的线程池,当用户使用迭代器迭代一行时,迭代器会预先取出多个 Key,并放入到一个队列中,线程池会从队列中读取 Key 并行的查找对应的 Value。
疑问:
- 预取在某些场景是否会有浪费?(用户不准备迭代完所有数据的场景,例如 Limit 或是 Filter)
- 为什么用线程池 + 队列,而不是直接用异步 IO?
挑战二:垃圾收集(GC)
上文中提到了,当用户删除一个 Key 时,WiscKey 只会将 LSM-Tree 中的 Key 删除掉,所以需要一个额外的方式清理 Value-Log 中的值。
最简单的方法是定期扫描整个 LSM-Tree,获得所有还有引用的 Value 地址,然后将没有引用的 Value 删除,但是这个逻辑非常重。
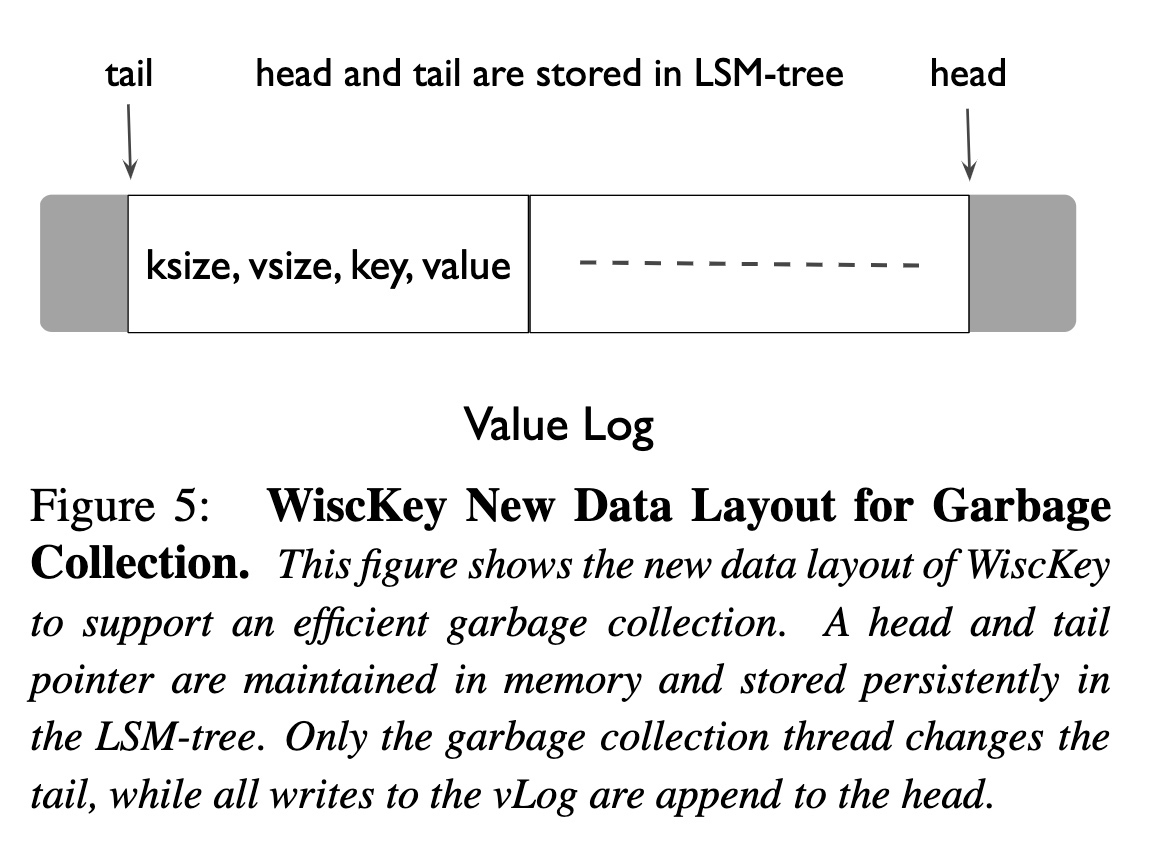
论文中介绍的方式是通过维护一个 Value Log 的有效区间(由 head 和 tail 两个地址组成),通过不断地搬运有效数据来达到淘汰无效数据。整个流程为:
- 对于 Value-Log 中的每个值,需要额外存储 Key,为了方便从 LSM-Tree 中进行反查(相对 Value,Key 会比较小,所以写入放大不会增加太多)
- 从 tail 的位置读取 KV,通过 Key 在 LSM-Tree 中查询 Value 是否还在被引用
- 如果 Value 还在被引用,则将 Value 写入到 head,并将新的 Value 地址写回 LSM-Tree 中
- 如果 Value 已经没有被引用,则跳过这行数据,接着读取下一个 KV
- 当已经确认数据写入 head 之后,就可以将 tail 之后的数据都删除掉了
因为需要重新写入一次 Value,并且需要将 Key 回填到 LSM-Tree 中,所以这个 GC 策略会造成额外的写放大。并且即使不做 GC,也只会影响到空间放大(删除的数据没有真正清理),所以感觉可以配置一些策略:
- 根据磁盘负载和 LSM-Tree 的负载计算,仅在低峰期执行
- 计算每一段数据中被删除的比例有多少,当空洞变得比较大的时候才触发 GC
挑战三:崩溃一致性
当系统崩溃时,LSM-Tree 可以保证数据写入的原子性和恢复的有序性,所以 WiscKey 也需要保证这两点。
WiscKey 通过查询时的容错机制保证 Key 和 Value 的原子性:
- 当用户查询时,如果在 LSM-Tree 中找不到 Key,则返回 Key 不存在
- 如果在 LSM-Tree 中可以找到 Key,但是通过地址在 Value-Log 中无法找到匹配的 Value,则说明 Value 在写入时丢失了,同样返回不存在
这个前提建立在于 WiscKey 通过一个 Write Buffer 批量提交 Value Log(下面有详细介绍),所以才会出现 Key 写入成功后 Value 丢失的场景,用户也可以通过设置同步写入,这样在刷新 Value Log 之后,才会将 Key 写入 LSM-Tree 中。
另外,WiscKey 通过现代的文件系统的特性保证了写入的有序性,即写入一个字节序列 b1, b2, b3…bn,如果 b3 在写入时丢失了,那么 b3 之后的所有值也一定会丢失。
优化一:Write Buffer
为了提高写入效率,WiscKey 首先会将 Value 写入到 Write Buffer 中,等待 Write Buffer 达到一定大小再一起刷新到文件中。所以查询时首先也要先从 WriteBuffer 中查询。当崩溃时,Write Buffer 中的数据会丢失,此时的行为就是上文中的崩溃一致性。
疑问:
- 根据这个描述,Value-Log 似乎是异步写入?结合上文中崩溃一致性的介绍,会有给用户返回成功但是数据丢失的情况?
优化二:WAL 优化
LSM-Tree 通过 WAL 保证了在系统崩溃时 memtable 中的数据可恢复,但是也带来了额外的一倍写放大。
而在 WiscKey 中,Value-Log 和 WAL 都是基于用户的写入顺序进行存储的,并且也具备了恢复数据的所有内容(前提是基于上文中的 GC 实现,Value Log 里存有 Key),所以理论上 Value-Log 是可以同时作为 WAL 的,从而减少 WAL 的写放大。
由于 Value Log 的 GC 比 WAL 更加低频,并且包含了大量已经持久化的数据,直接通过 Value-Log 进行恢复的话可能会导致回放大量已经持久化到 SST 的数据。所以 WiscKey 会定期将已经持久化到 SST 的 head 写入到 LSM-Tree 中,这样当恢复时只需要从最新持久化的 head 开始恢复即可。
疑问:
- Delete 操作只需要写 LSM-Tree,但如果需要 Value Log 作为 WAL,则 Delete 也需要写入到 Value Log 中
- 如果不应用这个优化,则可以做到只将大 Value 分离出 LSM-Tree,应用此优化后,小 Value 也必须要额外存到 Value Log 中了
- 与其说是用 Value Log 替代 WAL,不如说是让 WAL 支持读 Value…
效果
说完实现再看看效果,论文中有 db_bench 和 YCSB 的数据,为了节约篇幅,只贴一部分 db_bench 的数据。
db_bench 的场景分两种,一种是所有 Key 按顺序写入(这样写放大会更低,数据在每一层会更紧凑),另一种是随机写入(写放大更高,数据在每一层分布更均匀)。
顺序写入
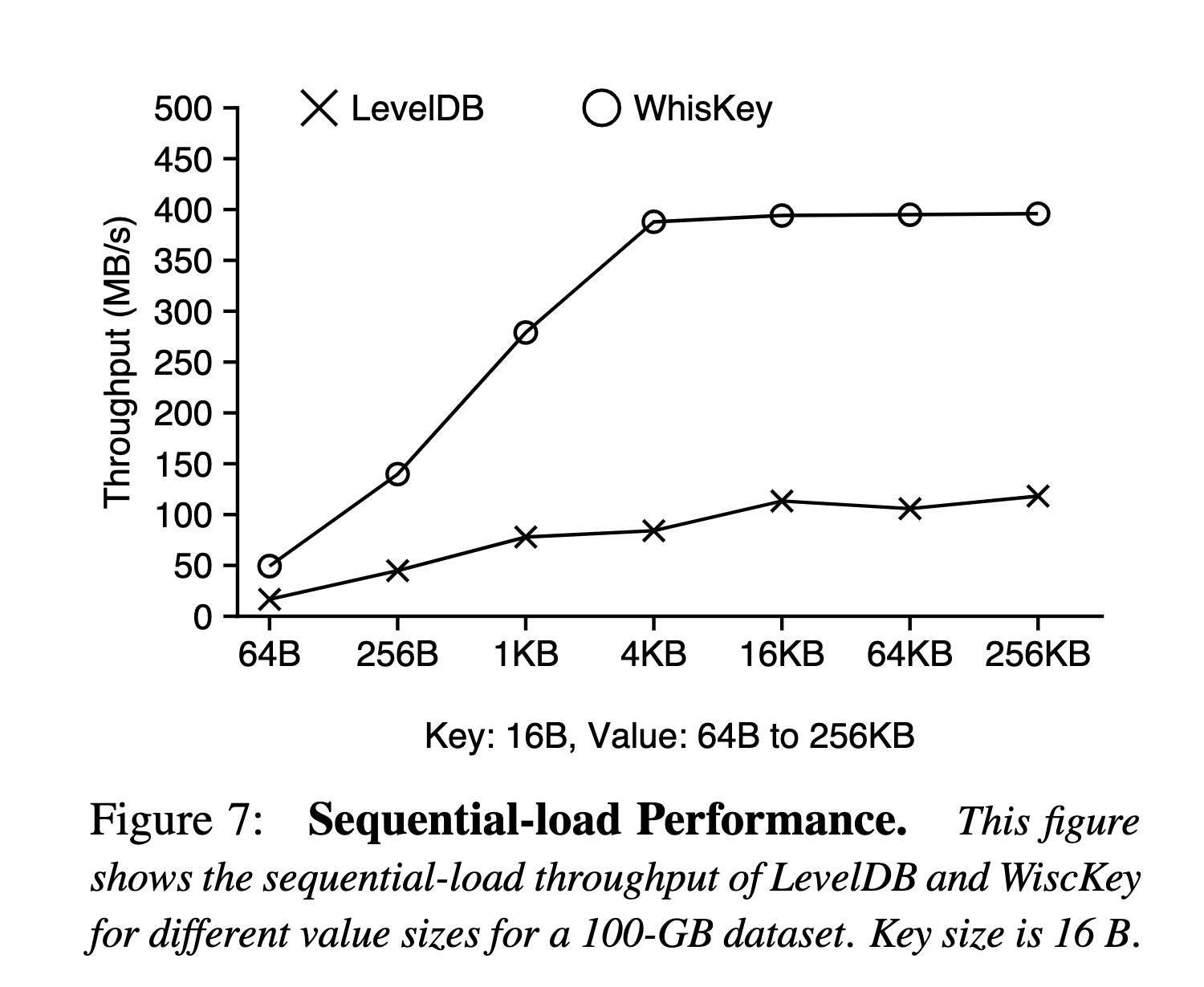
效果应该来自两部分:
- WAL 没了直接省了一倍写放大
- 顺序写入,每一层合并可以认为没有写放大,但是数据依旧要在每一层写一次,100 G 可能是 4~5 次(对应 L5 的大小)
随机写入
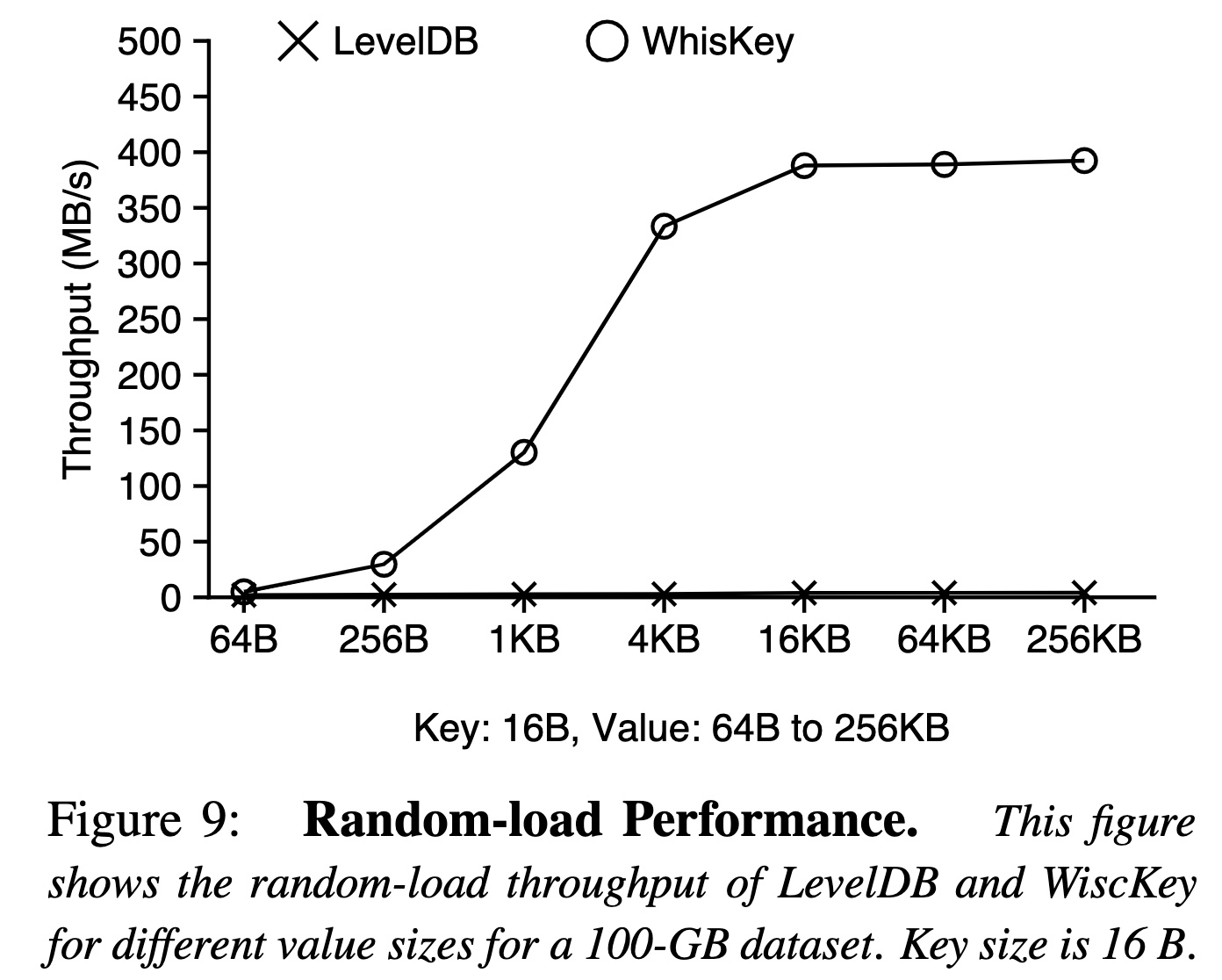
效果对比顺序写入,如果说为什么差距会这么大,只有可能是每一层合并造成的写放大了。
点查
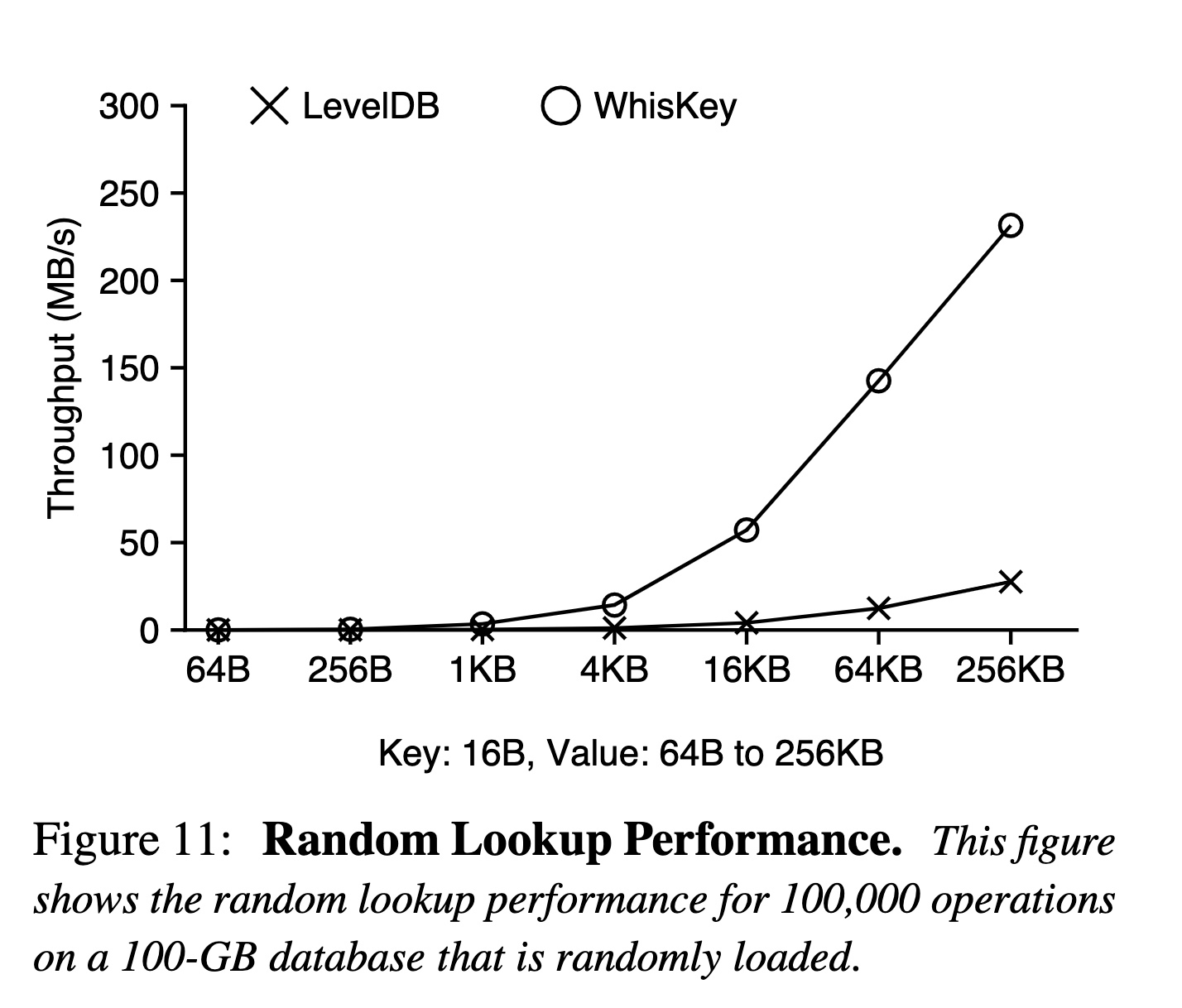
- 当 Value 比较小时,WiscKey 的劣势在于额外的一次随机读,而 LevelDB 的劣势在于读放大。当 Value 变得更大时,基于 SSD 内部的并行能力,随机读依旧能读满带宽,但是 LevelDB 读放大造成的带宽浪费却没有改善。
- 另外这个测试场景是数据库大小为 100G,对于 LevelDB 来说,层级和 KV 大小挂钩,对于 WiscKey 来说,层级和 Key 大小挂钩,所以当 Value 越大,WiscKey 中的 LSM-Tree 反而更小,层级也就更低,甚至可能仅在内存中 (例如 Value 为 256KB 时,Key 加起来才 100G / (16 + 256 1024) 16 ~= 610KB)
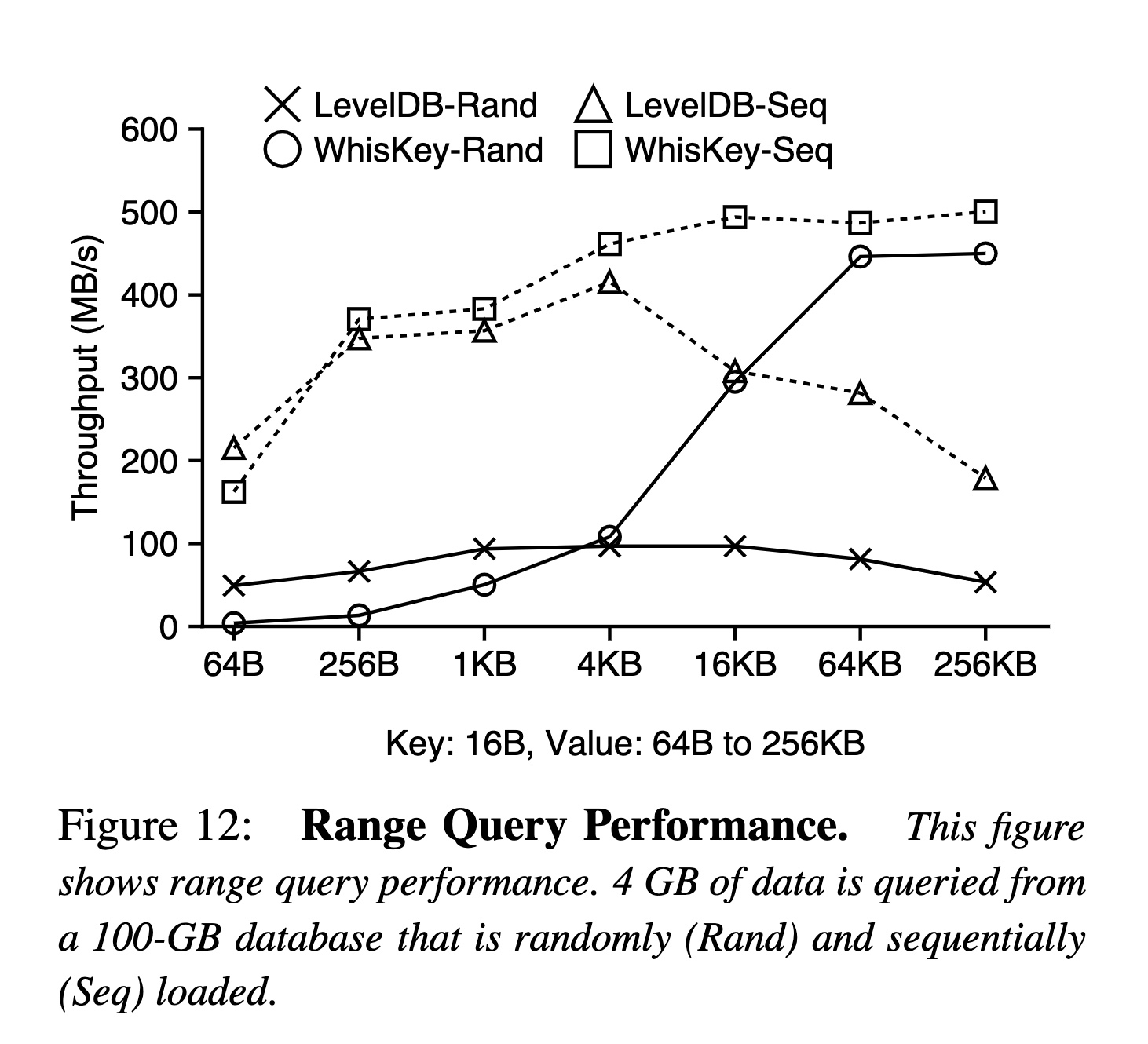
这个有点看不懂…:
- 在数据集是顺序写的场景下,LevelDB 的性能随着 Value 的增大反而降低了,这个不太理解原因(理论上读放大不会很大,而且是顺序读,很容易就能读满带宽),WiscKey 因为是随机读,并且有上文中提到的 LSM-Tree 本身很小,随着 Value 变大性能越高是符合预期的
- 在数据集是随机写的场景下,一开始 WiscKey 性能低是因为随机读的延迟,随着 Value 增大,优势应该和点查类似
GC
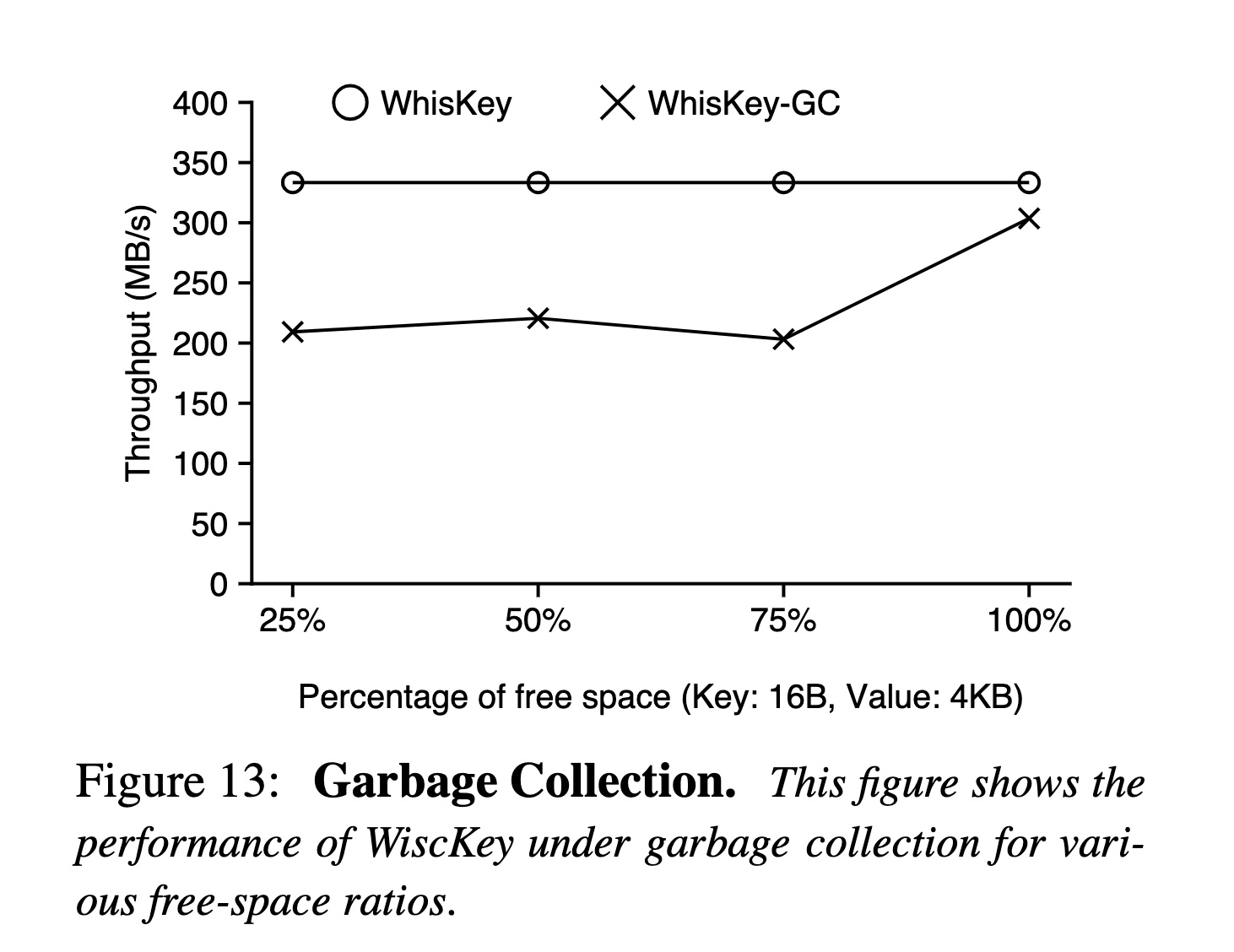
上文提到了 GC 会重写 Value 以及写回 LSM-Tree,造成额外的写入。当空余空间的占比越高时(大部分数据都已经被删了),回写的数据越少,对性能的影响也就越小。
Titan 的实现
BlobDB 和 Badger 的实现都和论文比较接近,并且也都是玩具。反而 TiKV 的 Titan 有一些独特的设计可以学习和讨论,所以下面只介绍这一案例。
核心实现
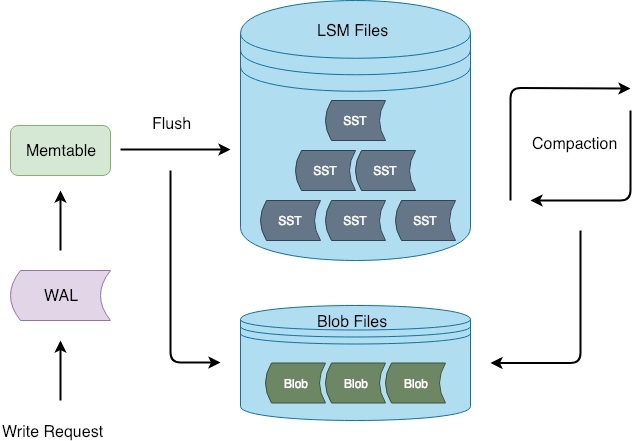
和 WiscKey 的主要区别在于:Titan 在 flush/compaction 时才开始分离键值,并且用于存储分离后 Value 的文件(BlobFile)会按照 Key 的顺序存储,而不是写入的顺序(其实在这个阶段,已经没有写入顺序了)。
因此导致实现上的差异有:
- 范围查询:由于 Value-Log 没有按照 Key 排序,所以 WiscKey 需要将一个范围查询拆解为多个随机读。而 Titan 保证了局部有序,在单个 BlobFile 内部可以顺序读,但是会有多个 BlobFile 的范围有重叠,需要额外做归并。另外对于预取策略,WiscKey 建立在 SSD 并行的优势上,可以靠增加并发预取增加吞吐,而 Titan 暂时没有如此激进的预取策略
- WAL 优化:在 WiscKey 的实现中通过 Value Log 替代 WAL 减少了一倍写放大,而 Titan 在 flush/compaction 时才进行键值分离,肯定是没办法做这个优化的,不过这一点在 Titan 的设计文档里也提到了:「假设 LSM-tree 的 max level 是 5,放大因子为 10,则 LSM-tree 总的写放大大概为 1 + 1 + 10 + 10 + 10 + 10,其中 Flush 的写放大是 1,其比值是 42 : 1,因此 Flush 的写放大相比于整个 LSM-tree 的写放大可以忽略不计。」,个人觉得还是还比较信服的
- GC 策略:Titan 目前有两个版本的 GC 策略,会在下面详细介绍
GC 策略
第一种策略(传统 GC):
- 首先挑选一些需要合并的 BlobFile,在 flush/compaction 时可以统计出每个 BlobFile 中已经删除的数据大小,从而挑选出空洞较大的文件
- 迭代这些 BlobFile,通过 Key 查询 LSM-Tree,判断 Value 是否还在被引用
- 如果 Value 还在被引用就写到新的 BlobFile 中,并把更新后的地址回填到 LSM-Tree 中
这个实现和论文中的 GC 方案类似,只不过论文为了 WAL 需要写入一条完整的 Value Log,所以需要维护 head 和 tail。Titan 的实现只需要每次都生成新的 BlobFile 即可。
不同点在于:WiscKey 是随机读,Value Log 的大小不会影响到读 Value 的成本。GC 策略在于写放大和空间放大的权衡,所以 GC 可以更加低频。而 BlobFile 是顺序读,如果 BlobFile 中的无效数据太多,会影响到预取的效率,间接也会影响到读的性能。
第二种策略(Level-Merge):
- 不存在单独的 GC,由 LSM-Tree 的 compaction 触发
- compaction 时,如果遍历到的值已经是一个 BlobIndex(代表值已经写入了某个 BlobFile),依旧将其读出来重新写入新的 BlobFile,也就是说每次 compaction 都会生成一批与新的 SST 完全对应的 BlobFile
- 目前 Level Merge 只在最后两层开启
开启 Level Merge 后相当于 GC 频率和 compaction 频率持平了(GC 频率最多也只能和 compaction 持平),并且在这个基础上,直接在 compaction 里做 GC,可以减少一次回写 LSM-Tree 的成本(因为在 compaction 的过程中就能将老的 Value 地址替换掉)。
这种策略的优点在于 BlobFile 中不再有无效数据,可以用更加激进的预取策略提高范围查询的性能,缺点是写放大肯定会比之前更大(个人觉得开启后,写放大就和标准 LSM-Tree 完全一样了吧(一次 compaction 需要合并的 Key 和 Value 都需要重写一遍)?),所以只在最后两层开启。
效果
Titan 的性能测试结果摘自官网的文章,大部分结论都和 WiscKey 类似,并且文章中也分析了原因,就不在此赘述了。
因为文章是 19 年初的,所以还没有上文中的 Level Merge GC,不过 GC 策略理论上只影响范围查询的性能,所以在此贴一下范围查询的性能:
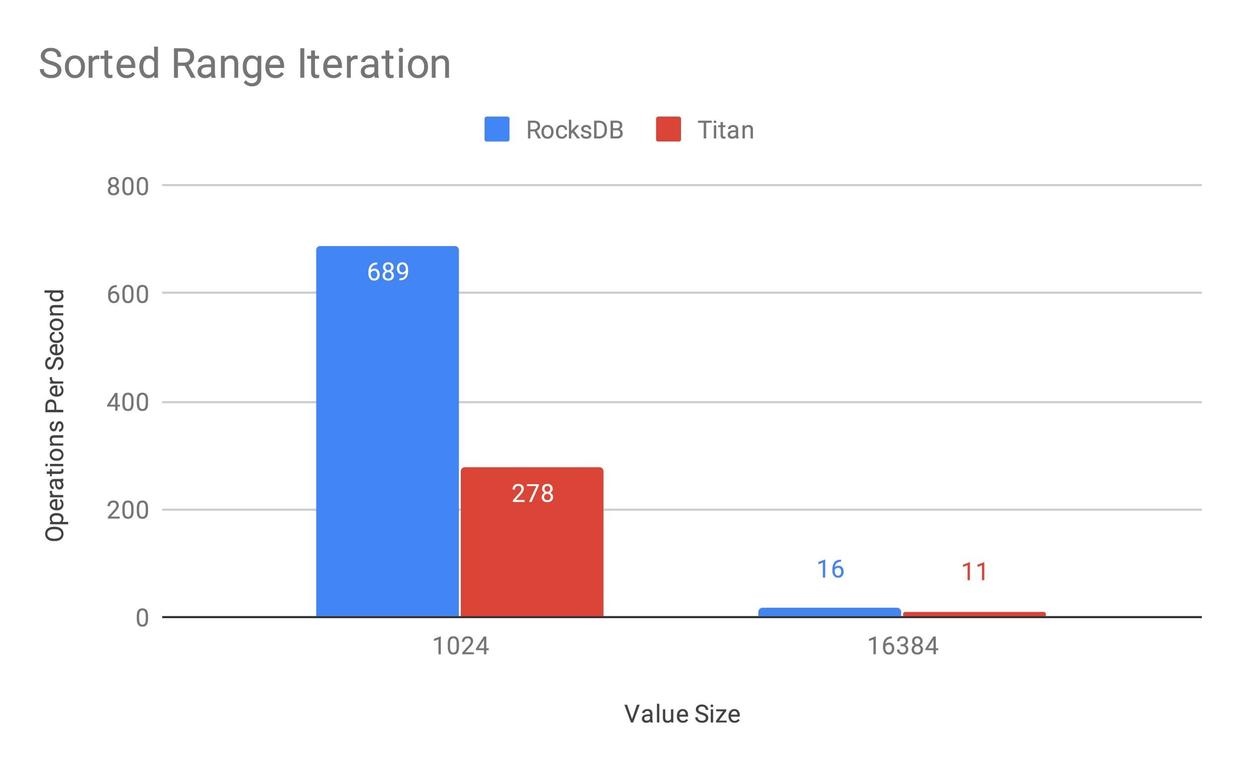
在实现 Level Merge GC 的策略之前,Titan 的范围查询只有 RocksDB 的 40%,主要原因应该还是分离后需要额外读一次 Value,以及没办法并行预取增加吞吐。 这点文章最后也提到了:
我们通过测试发现,目前使用 Titan 做范围查询时 IO Util 很低,这也是为什么其性能会比 RocksDB 差的重要原因之一。因此我们认为 Titan 的 Iterator 还存在着巨大的优化空间,最简单的方法是可以通过更加激进的 prefetch 和并行 prefetch 等手段来达到提升 Iterator 性能的目的。
另外在 TiDB in Action 也提到了 Level Merge GC 可以「大幅提升 Titan 的范围查询性能」,不知道除了完全去掉无效数据之外,是否还有其他的优化,还需要再看下代码。
感受
个人认为 WiscKey 的核心思想还是比较有意义的,毕竟适用的场景很典型而且还比较常见:大 Value、写多读少、点查多范围查询少,只要业务场景命中一个特点,效果应该就会非常显著了。
对于论文中的具体实现是否能套用在一个真实的工业实现中,我觉得大部分实现还是简单有效的,但是也有一些设计个人不太喜欢,例如使用 Value Log 替代 WAL 的方案,感觉有些过于追求减少写放大了,可能反而会引入其他问题,以及默认的 GC 策略还要写回 LSM-Tree 也有些别扭。
在和其他同事讨论内部项目的实现时,也畅想过一些其他玩法,例如只将 Value 中的一部分分离出来单独存储,或是一个分布式的 WAL 是否也能转换为 Value Log,会有哪些问题。包括看到 Titan 的实现时,我也很好奇设计成 BlobFile 这种顺序读的方式是否有什么深意(毕竟论文都把利用 SSD 写到标题里了),或者只是因为从 compaction 才开始分离键值最简单的做法就是按顺序存储 KV。
总之,期待将来能有更多工业实现落地,看到更多有趣的案例。
参考资料
- WiscKey: Separating Keys from Values in SSD-conscious Storage
- https://nan01ab.github.io/2018/07/WiscKey.html
- Titan 的设计与实现
- Titan 原理介绍
![week1-[循环嵌套]画正方形](http://pic.xiahunao.cn/week1-[循环嵌套]画正方形)





)
-大模型推理部署(分布式推理与量化部署)-大模型评估测试(OpenCompass))






及线程(1))


)
—条件结构)
