随着自动驾驶技术的迅速发展,车道线检测与跟踪技术在提高道路安全性和驾驶自动化水平方面发挥着至关重要的作用。本文针对基于机器视觉的车道线检测与跟踪关键技术进行了深入研究,旨在提升车道线检测的准确性与系统的实时响应能力。通过采用先进的深度学习模型和图像处理技术,本研究设计并实现了一种高效的车道线检测与跟踪系统。
在系统实现方面,首先采用改进的UNET_SERESNEXT101模型,结合深度卷积网络,对车道线特征进行有效学习和提取。通过引入加权损失函数优化训练过程,并利用多尺度特征融合技术增强模型对复杂交通场景的适应性。此外,本系统还融合了图像语义分割技术,利用DistributedDataParallel (DDP)框架提高了模型的训练效率,确保了检测系统在多种驾驶环境下的鲁棒性和准确性。
实验部分,本研究构建了一个包含多种驾驶条件和环境的车道线检测数据集,使用MyDataset进行数据加载并通过DataLoader进行高效管理。实验结果表明,所提出的模型在保证实时性的同时,相较于现有技术在检测准确率上有显著提升。同时,采用模型指数移动平均(ModelEMA)和策略性学习率调整(PolyWarmup)进一步优化了模型性能。
总结而言,本文提出的车道线检测与跟踪系统基于深度学习和机器视觉技术,有效解决了车道线检测在复杂环境下的准确性和实时性问题,为自动驾驶领域提供了一种可靠的技术支持。未来研究将探索更多的模型优化方向和实时处理策略,以应对更广泛的应用场景和更高的安全要求。
关 键 词:车道线检测;自动驾驶;机器视觉;深度学习;图像处理;模型优化;实时性能;数据集
ABSTRACT
With the rapid development of autonomous driving technology, lane detection and tracking technology plays a crucial role in improving road safety and driving automation level. This article conducts in-depth research on key technologies for lane detection and tracking based on machine vision, aiming to improve the accuracy of lane detection and the real-time response ability of the system. By adopting advanced deep learning models and image processing techniques, this study designs and implements an efficient lane detection and tracking system.
In terms of system implementation, the improved UNETSERESNEXT101 model is first adopted, combined with deep convolutional networks, to effectively learn and extract lane line features. By introducing a weighted loss function to optimize the training process and utilizing multi-scale feature fusion technology to enhance the model's adaptability to complex traffic scenes. In addition, this system also integrates image semantic segmentation technology and utilizes the Distributed Data Parallel (DDP) framework to improve the training efficiency of the model, ensuring the robustness and accuracy of the detection system in various driving environments.
In the experimental section, this study constructed a lane detection dataset containing multiple driving conditions and environments, loaded the data using MyDataset, and efficiently managed it through DataLoader. The experimental results show that the proposed model significantly improves detection accuracy compared to existing technologies while ensuring real-time performance. Meanwhile, the performance of the model was further optimized by using Model Exponential Moving Average (ModelEMA) and Strategic Learning Rate Adjustment (PolyWarmup).
In summary, the lane detection and tracking system proposed in this article is based on deep learning and machine vision technology, effectively solving the accuracy and real-time issues of lane detection in complex environments, and providing a reliable technical support for the field of autonomous driving. Future research will explore more directions for model optimization and real-time processing strategies to address a wider range of application scenarios and higher security requirements.
KEY WORDS: Lane detection; Autonomous driving; Machine vision; Deep learning; Image processing; Model optimization; Real time performance; data set
目 录
1 绪论
1.1 研究背景和意义
1.2 研究现状
1.3 系统设计思路
1.4 设计方法
2 相关技术介绍
2.1 卷积神经网络
2.2 GPU训练数据
2.3 Python技术
2.4 Pycharm开发工具
3 系统需求分析
3.1 功能需求分析
3.2 非功能需求分析
3.3 可行性分析
3.3.1 时间可行性
3.3.2 经济可行性
3.3.3 技术可行性
3.4 系统业务流程
4 系统设计
4.1 模型训练
4.2 硬软件环境
4.3 数据集
5 系统实现
5.1 车道线检测的实现
5.2 结果与分析
6 结论
参考文献
致 谢
在现代交通系统中,确保道路安全和提高驾驶效率是至关重要的。随着智能交通系统的快速发展,车道线检测与跟踪技术成为自动驾驶和辅助驾驶系统中的核心组成部分[1]。车道线是道路交通标记的重要元素,提供了驾驶路径的关键视觉信息,对于保持车辆在车道中行驶和防止交通事故起着决定性作用。因此,提高车道线检测与跟踪的准确性和可靠性,对于实现全自动驾驶技术具有重大的研究和实际意义。
传统的车道线检测技术主要基于简单的图像处理方法,如边缘检测和几何模型拟合,这些方法在高光、阴影或道路磨损情况下容易失效[2]。随着深度学习技术的兴起,基于机器视觉的方法展示出对复杂场景的高适应性和优越的性能。通过训练深度神经网络,可以有效识别和跟踪在不同光照、气象条件下的车道线,极大提高系统的鲁棒性。
然而,实时性是车道线检测系统设计中的另一大挑战。为了适应高速行驶的需求,检测系统必须能够在极短的时间内准确响应,这要求算法不仅要有高准确率,还需要有快速的处理速度[3]。此外,系统还应具备良好的普适性,能够在全球不同的道路条件和交通规则下有效工作。
因此,本研究旨在通过利用先进的机器视觉和深度学习技术,开发一套高效、准确、鲁棒的车道线检测与跟踪系统,以推动自动驾驶技术的实际应用,为智能交通系统的发展做出贡献。这将不仅提升道路安全,减少交通事故,还将为未来交通系统的智能化和自动化开辟新的可能。
车道线检测与跟踪技术是智能交通系统和自动驾驶车辆领域的重要研究课题。过去几年中,国内外许多研究机构和企业都在此领域取得了显著进展。
在国际上,谷歌的Waymo和特斯拉都是自动驾驶技术的先驱,他们在车道线检测与跟踪技术上投入了大量的研发资源。特斯拉的Autopilot系统使用了先进的图像识别技术,结合深度学习,不仅可以识别车道线,还能在复杂的交通环境中实现准确的车道保持[5]。此外,Mobileye,一家以色列公司,也在这一领域领先全球,他们开发的视觉感知技术被多家汽车制造商采用,用于提高车辆的安全性和导航能力。
在国内,百度Apollo项目也在车道线检测技术上取得了突破。Apollo平台采用基于深度学习的多传感器融合方法,能够实时准确地进行车道线定位和追踪,即使在夜间或恶劣天气条件下也能保持高性能。同济大学的自动驾驶实验室也进行了相关研究,他们开发的基于机器视觉的车道线检测系统能够适应中国复杂的道路和交通状况,显著提高了检测的准确率和系统的稳定性[6]。
此外,哈尔滨工业大学的研究团队提出了一种结合图像分割和深度卷积网络的方法,有效提升了车道线检测的准确性和适应不同光照条件的能力。该研究成果已在多个国际知名期刊上发表,得到了国际同行的认可。
尽管车道线检测技术已经取得了显著的进展,但在处理极端天气条件、适应不同地理环境和文化差异方面仍面临挑战[7]。未来的研究需要进一步提高算法的鲁棒性和适应性,同时降低系统的成本,使其更加普及。随着人工智能技术的不断进步,预期这些技术问题将得到有效解决。
在设计基于机器视觉的车道线检测与跟踪系统时,遵循了以下四项核心思路来确保系统的高效性、准确性、稳定性和实用性:
- 深度学习模型的应用:
为了实现高准确率的车道线检测,系统采用了基于深度学习的图像识别技术。选择了卷积神经网络(CNN)作为主要的算法框架,由于其在图像处理领域表现出的卓越能力,特别是在特征提取和模式识别方面。通过训练包含多种道路和光照条件下的数据集,使模型能够识别并跟踪不同环境下的车道线。
- 多传感器数据融合:
考虑到仅依靠单一摄像头输入的局限性,系统设计集成了多种传感器数据,如雷达和激光雷达(LiDAR),以提高检测的鲁棒性。通过融合这些传感器提供的多维度数据,系统能够更准确地进行车道线定位,特别是在视觉信息不足或受阻的情况下。
- 实时性能优化:
车道线检测系统需要在毫秒级响应时间内准确地输出结果以符合自动驾驶的需求。因此,在系统设计中特别注重优化计算流程和算法效率。采用了模型压缩和硬件加速技术,如使用GPU进行并行处理,以确保系统能够快速处理输入的视频流并即时反馈车道线状态。
- 用户交互与反馈机制:
为了使系统更加用户友好并增强实用性,设计了直观的用户界面,允许操作者轻松设定参数并监视系统状态。此外,系统还包括了一个反馈机制,能够根据实际驾驶情况自动调整检测参数,如校正检测阈值和优化跟踪算法,从而提高系统适应不同驾驶环境的能力。
通过这些设计思路的实施,期望该车道线检测与跟踪系统不仅能够提供高准确率的检测结果,同时也能满足实时性和灵活性的需求,为自动驾驶车辆在复杂交通环境中的安全运行提供坚实的技术支持。
在撰写关于基于机器视觉的车道线检测与跟踪技术的研究论文过程中,采用合适的研究方法对于确保论文质量和科学性至关重要。以下是本文所采用的几种关键研究方法:
文献综述:文献综述为研究提供了坚实的理论基础和背景知识。计算机视觉领域,尤其是车道线检测与跟踪,已经经历了众多发展阶段,各个阶段都积累了丰富的研究成果和技术更新。通过对历史和现存文献的全面回顾,可以把握领域内的发展脉络,避免重复研究,同时借鉴先进的理论和技术以指导自己的实验设计。
比较分析法:通过比较分析法,本研究明确了当前系统与市场上主流车道线检测系统之间的差异和潜在优势。通过深入分析不同系统的设计架构、功能实现与性能表现,可以识别本系统的短板和优势,进而针对性地进行优化和提升。
实地调查法:为了确保研究成果的实际应用价值和系统设计的用户友好性,采用实地调查法来收集目标用户群的反馈和需求是非常必要的。通过调查潜在用户的使用习惯、偏好及功能需求,可以在系统设计初期就将用户的声音融入产品开发中,确保最终产品能够更好地服务于实际用户。
这些研究方法不仅加深了对车道线检测与跟踪技术的理解,而且提高了研究的实用性和科学性,确保研究成果能够有效地支持自动驾驶技术的发展,为相关领域提供有力的技术支撑。
CNN的核心在于其能够自动、有效地从图像中提取特征。这一能力归功于网络的多层结构,包括卷积层、池化层和全连接层。卷积层通过滤波器对图像进行卷积操作,提取出图像的局部特征;池化层(如最大池化)则用于降低特征维度,增强网络对图像变换的不变性;全连接层则负责将学到的“高级”特征映射到最终的输出,如车道线的位置。
在车道线检测任务中,CNN能够从原始的道路图像中直接学习到有用的特征表示,无需手动设计图像处理算法。此外,通过深层网络,CNN可以学习到从简单到复杂的多级特征,这对于处理在复杂背景下的车道线检测尤为重要。现代的车道线检测系统常采用如UNet、SegNet等改进的CNN架构,这些网络通过特殊设计增强了对图像中车道线位置的精确识别,极大提升了检测的准确性和系统的实用性。
总之,卷积神经网络在车道线检测与跟踪的研究中扮演着关键角色,其强大的特征提取能力和适应性使其成为该领域内不可或缺的技术之一。
基于PyTorch框架的深度学习训练过程,特别是针对使用多GPU环境下的分布式训练(DDP, DistributedDataParallel)。这一实现首先涉及设置环境变量以确定训练是否在分布式环境中执行,通过LOCAL_RANK、RANK和WORLD_SIZE变量控制GPU的分配与任务分发。
在SegTrainer类的初始化中,系统根据是否使用CUDA以及是否在多GPU环境中决定是否将模型封装在DDP中。如果启用了同步批归一化(sync_bn),模型会转换为同步批归一化模式以保持各设备间批归一化参数的一致性。
训练过程中,根据交叉验证的设置(可选的折数kfolds_number),数据被划分为训练集和验证集。训练集和验证集各自加载到对应的DataLoader中,以便进行批处理。UNET_SERESNEXT101模型用于车道线检测任务,与一个特定的优化器和学习率调度器(采用PolyWarmup策略)一起配置。此外,使用了混合精度训练来优化性能和内存使用。
总结而言,这一GPU训练框架利用了现代深度学习工具和技术来高效地训练复杂的网络模型,提升了训练的速度和效率,同时确保了在多GPU环境中的可扩展性和稳定性。
Python是一种高级编程语言,以其简洁的语法和强大的库支持在科学计算、数据分析和机器学习领域中广受欢迎。对于基于机器视觉的车道线检测与跟踪技术研究,Python提供了一系列优秀的库,如NumPy、Pandas进行数据处理,Matplotlib进行数据可视化,以及TensorFlow、PyTorch等深度学习框架进行复杂的图像处理和模型训练。
在车道线检测与跟踪项目中,Python允许研究人员利用OpenCV库进行高效的图像处理操作,如图像裁剪、色彩转换、滤波和边缘检测等。这些操作是提取用于车道线识别的关键特征的基础。此外,PyTorch和TensorFlow等库提供的深度学习功能使研究人员能够设计、训练和部署复杂的卷积神经网络,这些网络能够从道路图像中学习到判别车道线的有效特征。
Python的跨平台性和庞大的开发社区也为车道线检测技术的研发提供了极大的便利。研究人员可以通过社区分享的资源和经验,快速解决开发中遇到的问题,并持续获得关于最新工具和技术的更新。这使Python成为开展此类研究的理想选择,可以加速从理论探索到实际应用的转化过程。
PyCharm 是由 JetBrains 开发的一款强大的 Python 集成开发环境(IDE),广泛应用于各种 Python 项目,包括机器视觉和深度学习应用。对于进行基于机器视觉的车道线检测与跟踪的研究,PyCharm 提供了一套完整的工具和功能,极大地提升开发效率和代码质量。
首先,PyCharm 提供了代码编辑、调试和优化的高级功能,如代码自动完成、项目导航、智能错误检测和一键式代码修复建议,这些功能使得编写和维护复杂的图像处理和机器学习代码变得更加高效和直观。其内置的代码分析和重构工具可以帮助开发者优化代码结构,提高代码的可读性和可维护性。
此外,PyCharm 支持直接集成多种科学包和框架,如 NumPy、SciPy、Matplotlib、Pandas、TensorFlow 和 PyTorch,允许研究人员在同一环境中开发、测试和部署机器视觉模型。它的虚拟环境管理工具也非常方便,可以帮助开发者在隔离的环境中管理不同的依赖和库版本,避免了版本冲突问题。
PyCharm 还提供了版本控制系统的完整集成,支持 Git、Subversion、Mercurial 等,这对于团队协作和代码版本管理至关重要。通过这些集成的版本控制工具,团队成员可以轻松地共享工作进度并追踪代码变更。
综上所述,PyCharm 作为一款专业的 Python IDE,其全面的开发支持和丰富的功能,特别适合用于复杂的机器视觉项目,如车道线检测与跟踪,大大提升了开发的效率和项目的成功率。
在基于机器视觉的车道线检测与跟踪系统的研究中,功能需求分析是确保系统设计满足预期目标的关键步骤。以下是系统设计中考虑的四项主要功能需求:
- 高精度的车道线检测能力:
系统必须能够在各种环境条件下(如不同光照、天气状况和道路类型)准确检测车道线。这要求系统具备强大的图像处理能力,能够从复杂背景中准确分辨出车道线,同时对于断裂或部分遮挡的车道线也能进行有效的识别和重建。
- 实时跟踪和响应:
考虑到车辆行驶的动态性,系统应具备快速响应能力,能够实时跟踪车道线的变化,并即时更新检测结果。这要求系统具有较高的处理速度和低延迟,以支持车辆在高速行驶时的安全驾驶需求。
- 鲁棒性:
系统需要对各种干扰因素具有较强的抵抗力,包括光线反射、阴影、路面磨损和临时覆盖物等。鲁棒性的增强可以通过改进算法和增加环境适应性调整来实现,确保在多变的道路环境中依然能够稳定运作。
- 用户交互与反馈机制:
车道线检测系统应提供直观的用户界面,让操作者能够轻松设置参数、监控系统状态及查看检测结果。此外,系统应具备反馈机制,允许用户报告问题和建议,系统根据这些输入进行自我优化和调整,以不断提升系统性能和用户满意度。
通过上述功能需求的详尽分析和实施,可以确保车道线检测与跟踪系统在提供高效、准确服务的同时,也能适应不同用户和环境的需求,为智能驾驶技术的发展做出贡献。
在基于机器视觉的车道线检测与跟踪系统的开发中,除了满足特定的功能需求外,非功能需求同样扮演着至关重要的角色。以下是系统设计中必须考虑的四项主要非功能需求:
- 系统性能:
系统必须具备高性能处理能力,能够在极短的时间内处理大量的图像数据,并实时输出检测结果。这要求后端处理必须优化,以减少任何可能的延迟,确保在实际驾驶过程中的连续性和实时性。
- 可扩展性:
随着技术的发展和需求的变化,系统应能支持后续的升级和扩展。这包括能够集成新的技术和算法,以及扩展到更多的硬件和软件平台上。可扩展性确保了系统的长期有效性和适应未来技术变革的能力。
- 安全性:
系统必须确保所有数据的安全,特别是用户的输入和系统的输出数据。应采取适当的加密和安全措施,防止数据泄露或被未授权访问。同时,系统还需要有能力检测和防御可能的安全威胁,如入侵尝试或数据篡改。
- 维护性和可测试性:
系统的代码应该易于维护和升级,且应当具备高可测试性。开发过程中要采用模块化的设计,并编写清晰的文档和注释,使得其他开发者可以轻松理解和维护代码。同时,应该提供全面的测试框架来持续验证系统功能和性能,确保在任何更新后系统依然稳定运行。
通过对这些非功能需求的深入分析和妥善实施,可以大大提升系统的整体质量和用户满意度,确保车道线检测与跟踪系统在实际应用中的稳定性和可靠性。
在进行基于机器视觉的车道线检测与跟踪技术的研究时,时间可行性分析是关键因素之一。当前,深度学习和计算机视觉技术已相当成熟,提供了强大的工具和库,PyTorch,这些工具可以加速开发流程和实验周期。结合现有的高性能计算资源和GPU加速能力,项目的核心技术开发和测试阶段预计能够在合理的时间框架内完成。然而,系统的细化优化和现场实施可能需要额外时间,尤其是在多种交通环境下的广泛测试。综合考虑,项目预计能够在预定的研究周期内达到初步的研究目标,但推向商业化应用可能需要更长时间进行迭代和改进。
对于基于机器视觉的车道线检测与跟踪系统的经济可行性分析来说,虽然初期投资包括高性能计算资源、开发软件许可及人员成本可能较高,但随着技术的普及和成本的逐步降低,长期看这种技术具有经济效益。此外,该技术的实施可以显著提高道路安全,减少交通事故,从而降低因交通事故带来的经济损失和社会成本。同时,随着自动驾驶车辆的逐渐普及,市场对于高效可靠的车道线检测技术的需求日益增加,预期将带来较大的市场回报。因此,从长期和广泛应用的角度来看,投资此项技术是经济上可行的。
基于机器视觉的车道线检测与跟踪技术的技术可行性较高。随着计算机视觉和人工智能领域的迅速发展,已经有许多成熟的算法和模型,如卷积神经网络(CNN),能够有效处理图像识别和分析任务。此外,现有的技术基础设施,包括高性能GPU和大规模数据处理能力,为实现复杂的图像处理提供了必要的硬件支持。在软件方面,开源框架PyTorch提供了强大的工具,可以加速开发和部署过程。因此,从技术实现的角度来看,部署一个高效的车道线检测与跟踪系统是完全可行的。
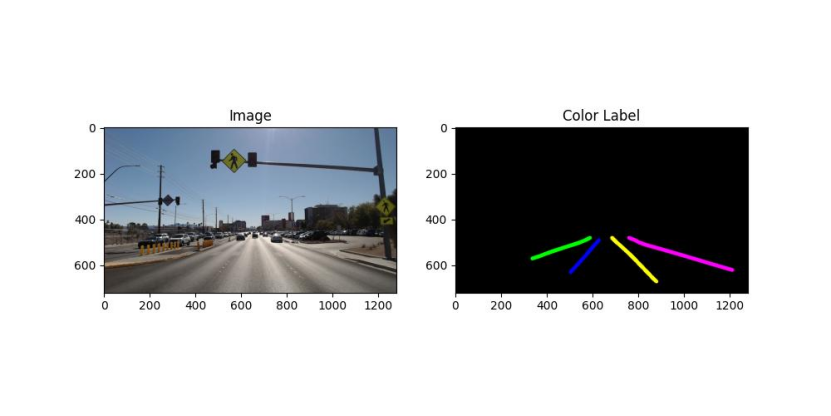
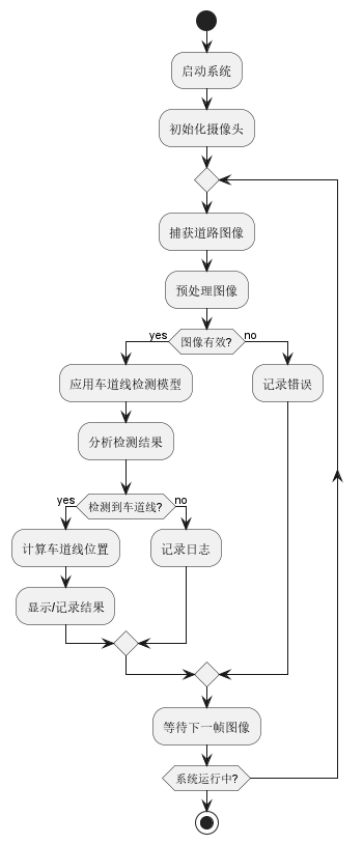
在基于机器视觉的车道线检测与跟踪系统中,整个业务流程旨在实现高效且精确的车道标识识别,以辅助或实现自动驾驶功能。此系统通过连续捕获道路图像并对其进行分析,确保实时性和准确性的同时,也能适应不同的道路和光照条件。
流程开始于系统的初始化,这包括启动摄像头和配置相关参数,确保能够清晰地捕捉到道路图像。随后,系统对捕获的图像进行预处理,这一步骤对于后续的图像分析至关重要,因为它直接影响到检测模型的输入质量和最终结果的可靠性。
通过深度学习模型对预处理后的图像进行车道线检测,模型会输出车道线的位置信息。系统需要分析这些信息,验证检测结果的准确性,并据此进行适当的响应,如调整车辆行驶方向或提醒驾驶员。如果模型未能检测到车道线或检测结果不准确,系统将记录这一事件,供后续分析和模型优化使用。
整个业务流程的设计考虑了系统的实用性和可靠性,确保在实际道路条件下能够有效地辅助驾驶,从而提升行车安全。业务流程图如下:




)


上的适配探索与实践)






JavaScript 基础知识)
(二))



