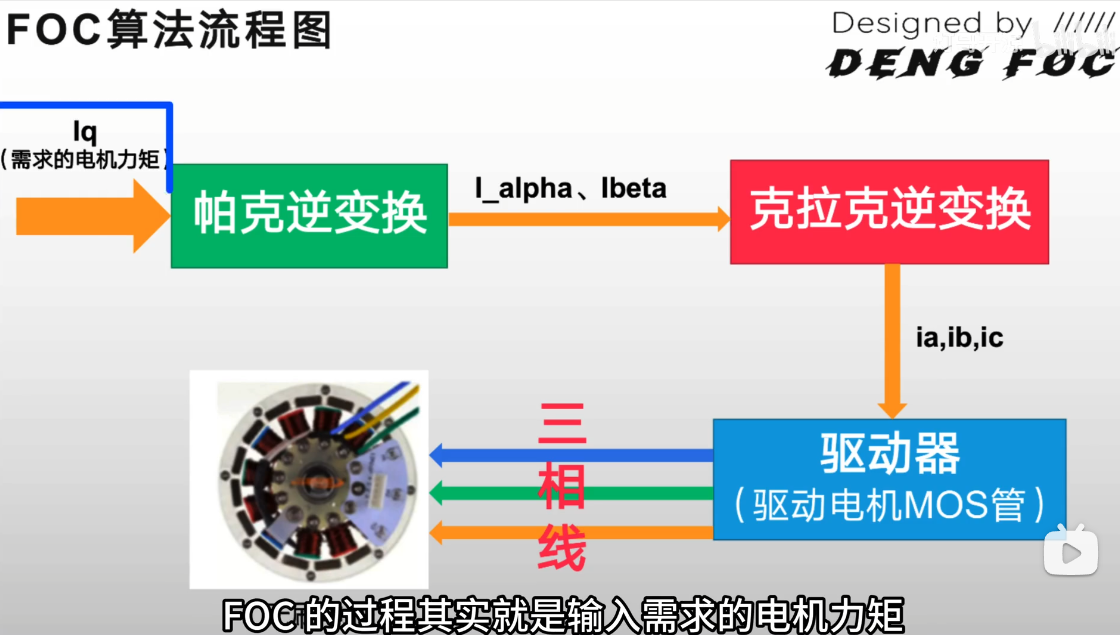
FOC的过程其实就是输入需求的电机力矩,把需求的电机力矩转化为三相线电压输出,并且让电机物理输出你所需求的力矩的过程,这也被称为电机控制三环中的力矩环,所有后面的位置闭环和速度闭环都得基于这个力矩环,而这个力矩环的算法实际上就是一个无刷电机旋转状态的数学模型
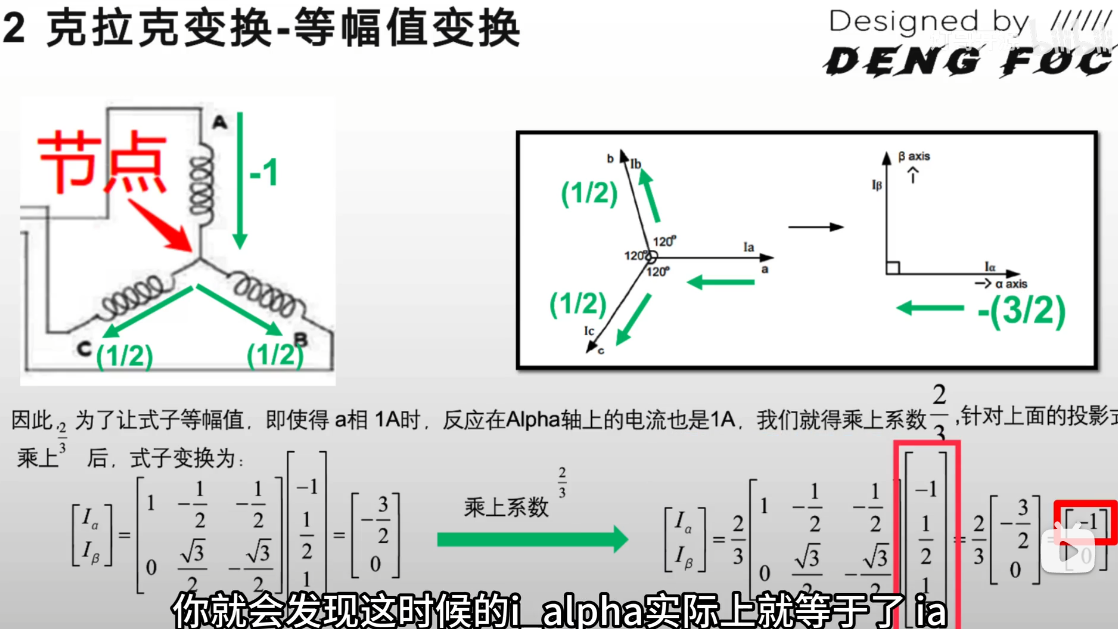
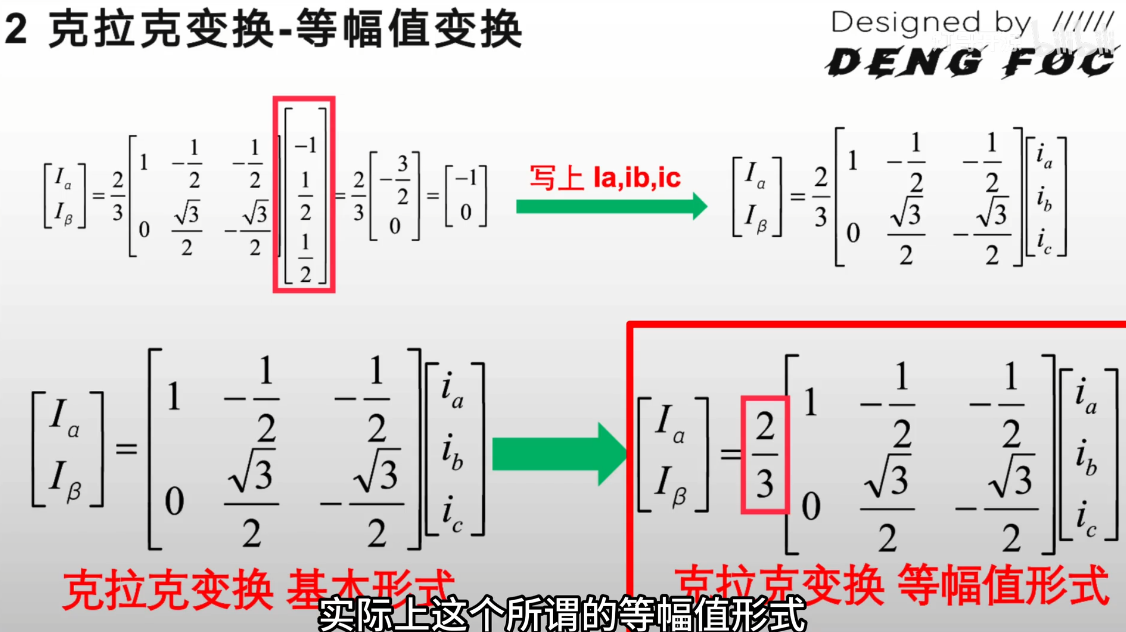
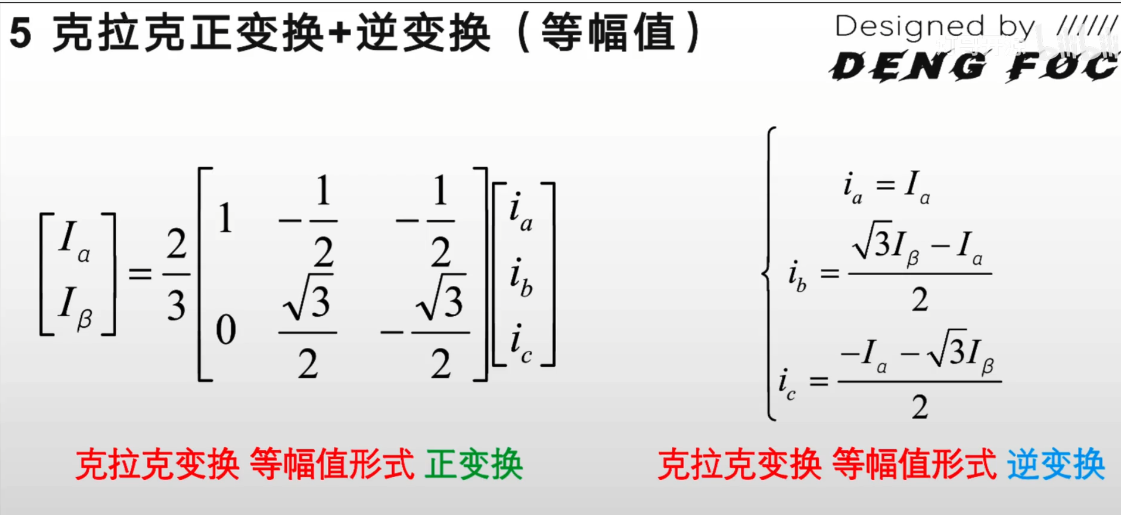
总结一下,实际上这个所谓的等幅值形式,其实就是想建立出一种i_α=i_a 这样一种简化的运算环境,为了达到这一点,它给式子乘上了2/3。
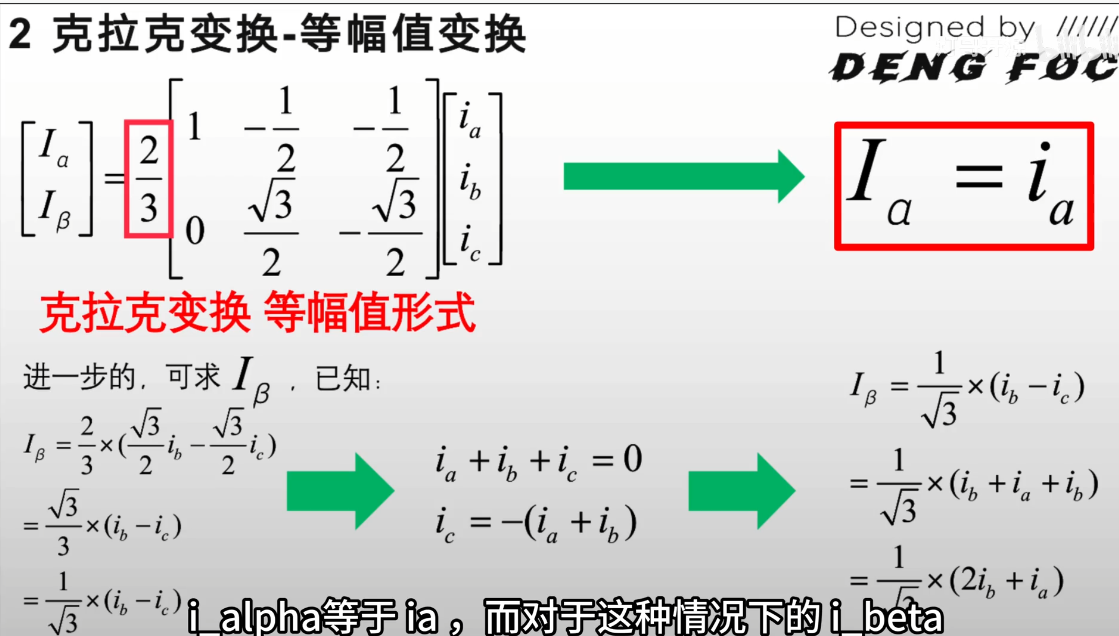
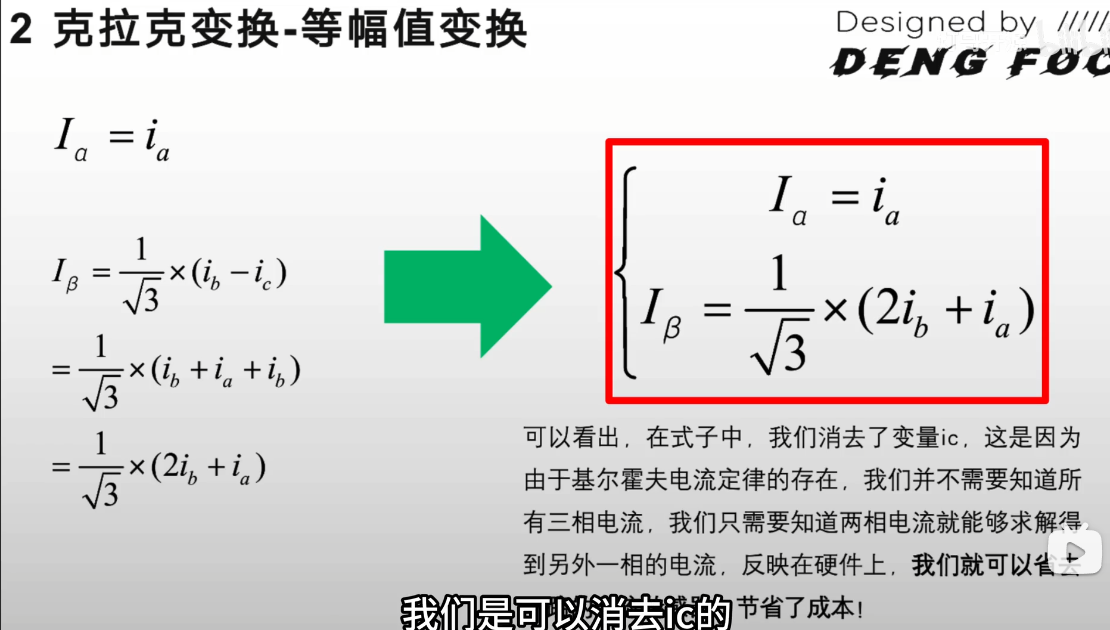
这样我们就可以得到化简之后的克拉克等幅值变换形式,由于基尔霍夫电流定理的存在,实际上在整个克拉克变换等幅值形式的变换里面,我们是可以消去ic的,在消去i_c后,Iα和Iβ我们只需要用a,b相的电流就可以算出来了,我们并不需要知道所有的三相电流,只要知道其中的两相:ia和ib就可以了。
以简单的二维坐标形式来描述三相电机运转时的电流情况为我们下一步深入建立电机的运动模型并且实现FOC打下了基础,但是只有它是不够的,我们还需要把这个理论和旋转状态中的电机对应起来,也就是建立电机旋转时的数学模型,要实现这一步就要用到帕克变换



![文生3D实战:用[灵龙AI API]玩转AI 3D模型 – 第7篇](http://pic.xiahunao.cn/文生3D实战:用[灵龙AI API]玩转AI 3D模型 – 第7篇)




)









算法(附matlab代码))
