目前网络上对Tesla自动驾驶硬件(AP1-AP4、HW1.0-HW4.0)迭代的相关介绍比较混乱,本文这里进行系统化梳理并澄清,并对一些错误进行更正。
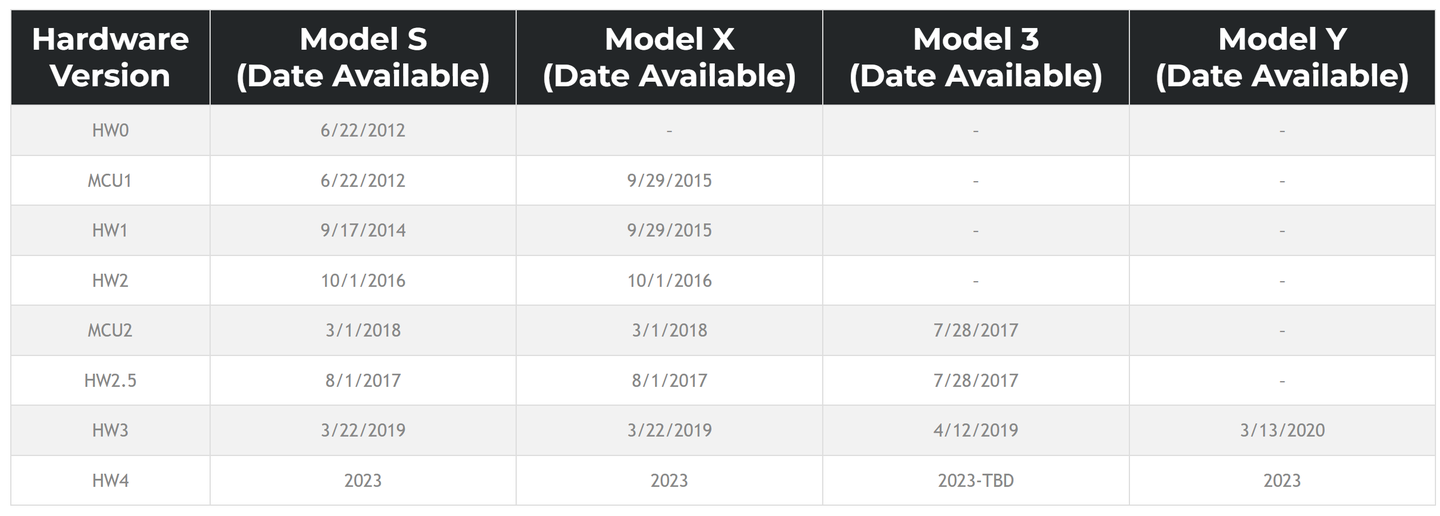
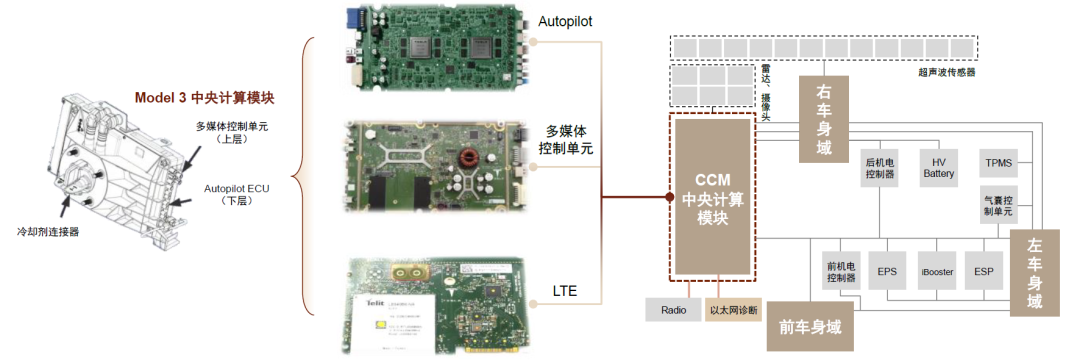
1、AutoPilot HW迭代图
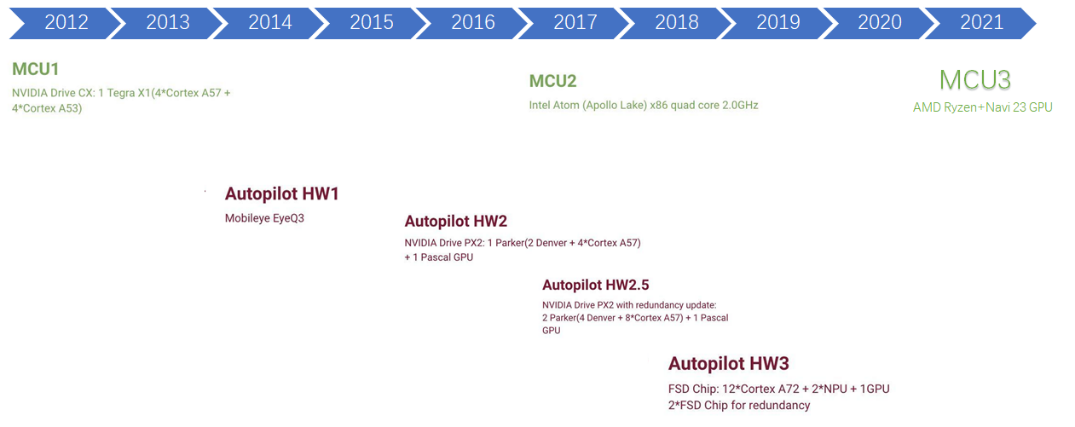
上面的图中没有包含AutoPilot HW4.0,下图列出了从AutoPilot HW1.0 到AutoPilot HW4.0的迭代情况,以及MCU1到MCU3的迭代情况(左下角的表格)。
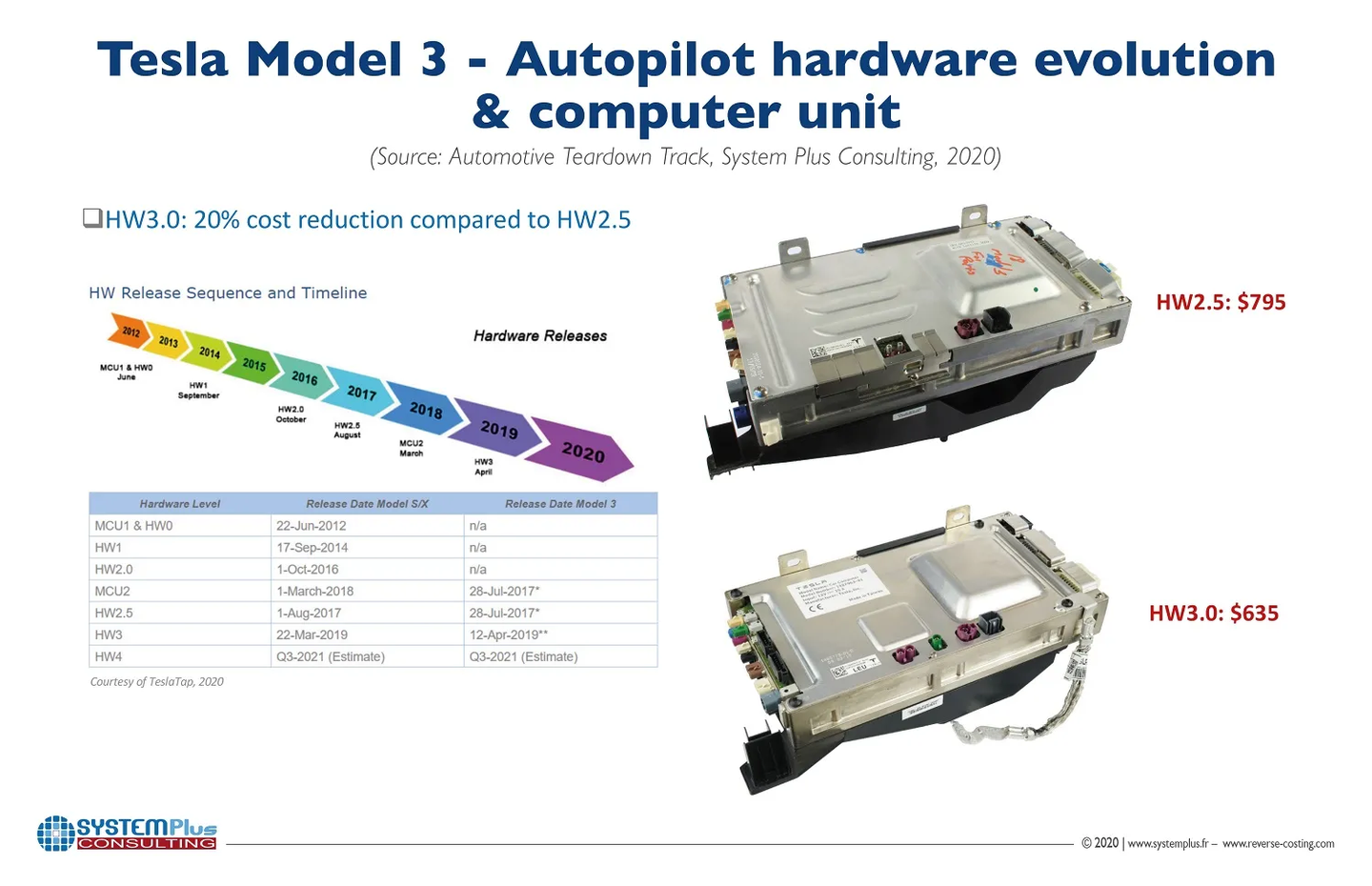
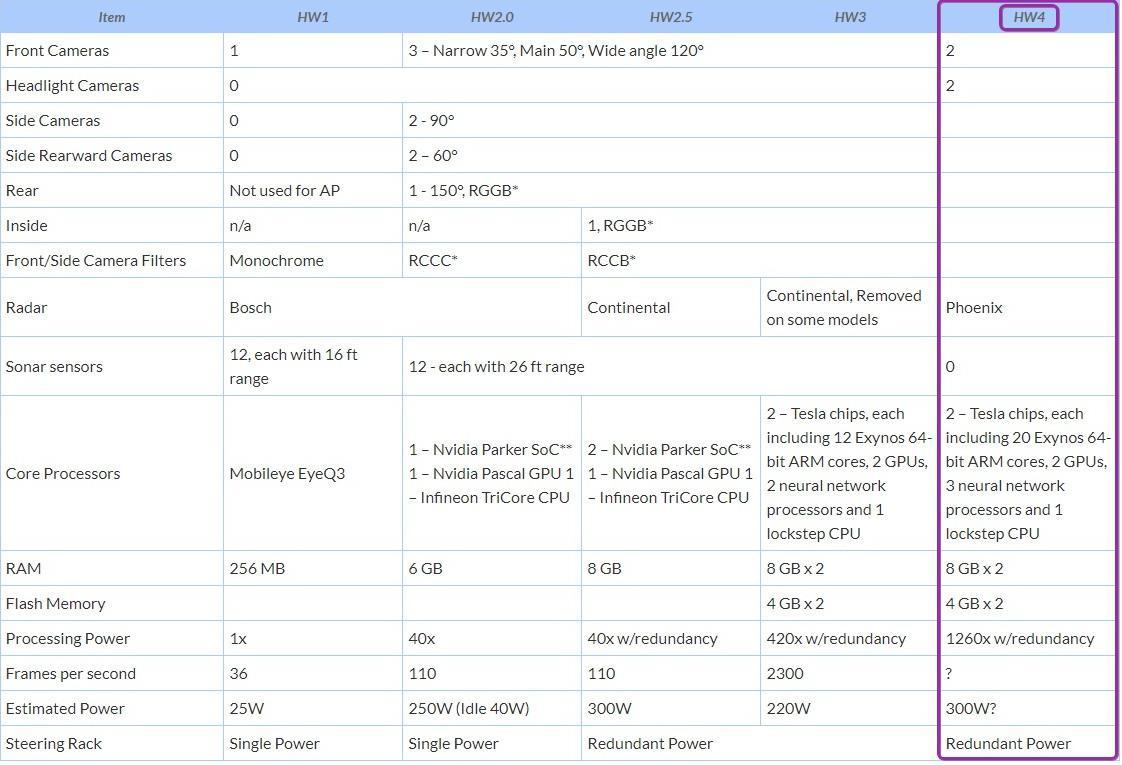
下表中列出了从AutoPilot HW1.0 到AutoPilot HW4.0域控以及配套传感器的迭代情况。但是HW4的信息,下表没有列完整。
Ref:https://teslatap.com/articles/autopilot-processors-and-hardware-mcu-hw-demystified/
自驾域控 | Camera | USS | Radar | |
|---|---|---|---|---|
HW1.0 | Mibleye Q3 | Front Camera(黑白)*1; | 12(5m) | 1(160m博世) |
HW2.0 | Drive PX2 | Camera(RCCC)*8: | 12(8m) | 1(160m博世) |
HW2.5 | Drive PX2 | Camera(RCCB)*8: | 12(8m) | 1(大陆170m) |
HW3.0 | TESLA FSD1代(14nm)*2 | Camera(RCCB)*8: | 12(8m) | 1(大陆170ms)部分车型取消 |
HW4.0 | TESLA FSD2代(7nm)*2 | Camera(RGGB)*11: | 无?? | 1(自研4D Radar) |
AutoPilot Hardware (AP)
硬件发布 | 年 | 常用名 |
AP1 | 2014年10月 – 2016年10月 | AP1、HW1、AutoPilot1、Mobileye AutoPilot |
AP2 | 2016年10月 – 2017年7月 | AP2、HW2、AutoPilot2 |
AP2.5 | 2017年7月 – 2019年4月 | AP2.5、HW2.5、AutoPilot2.5 |
AP3 | 2019年4月 – 2023年 | AP3,HW3,全自动驾驶 (FSD) |
AP4 | 2023年 | AP4、HW4、FSD 2 |
Ref:https://hk.evoffer.com/blog/introducing-car-computer/
Ref:https://www.findmyelectric.com/tesla-autopilot-ultimate-guide/
Ref:https://teslatap.com/articles/autopilot-processors-and-hardware-mcu-hw-demystified/
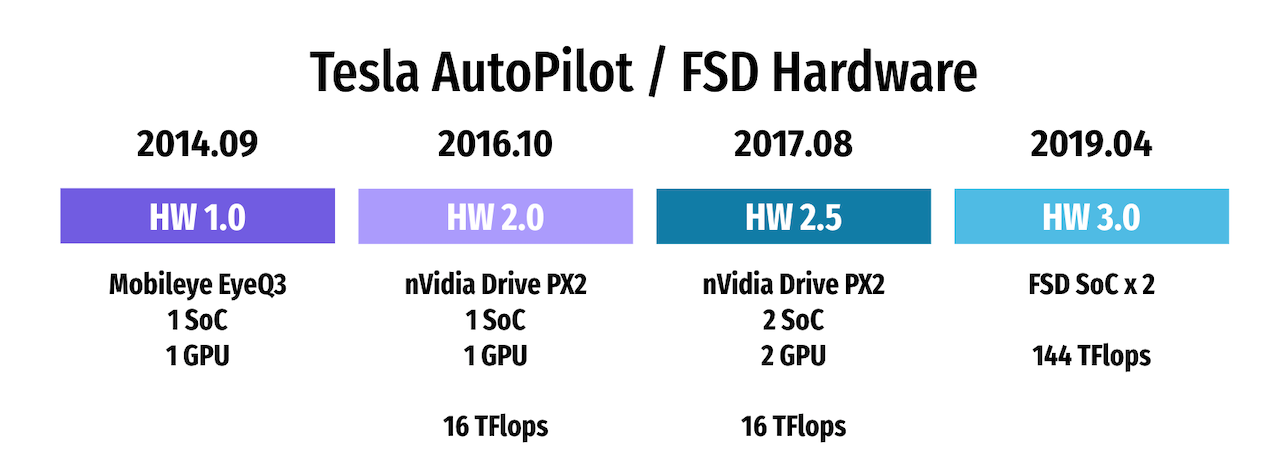
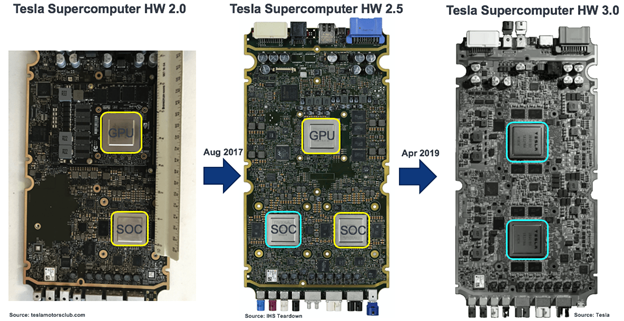
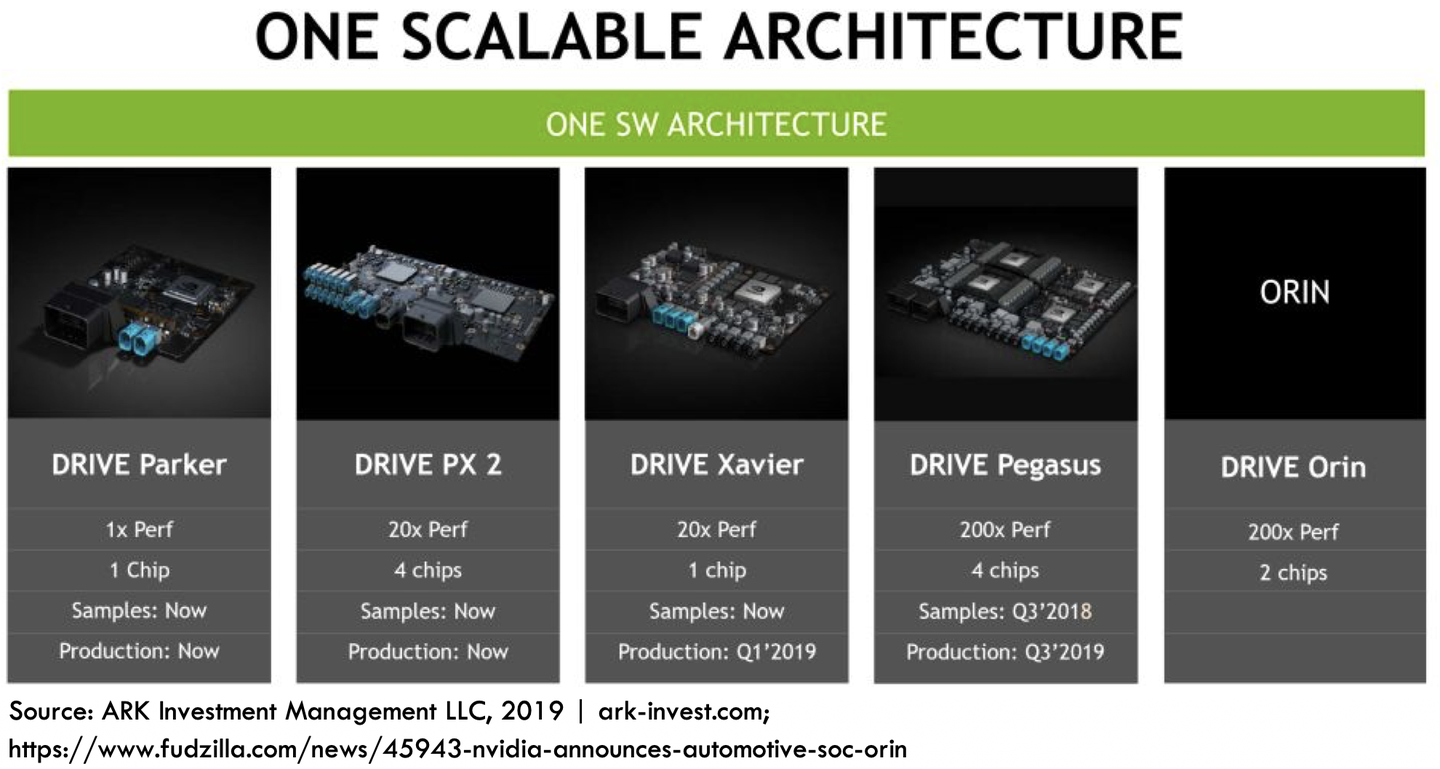
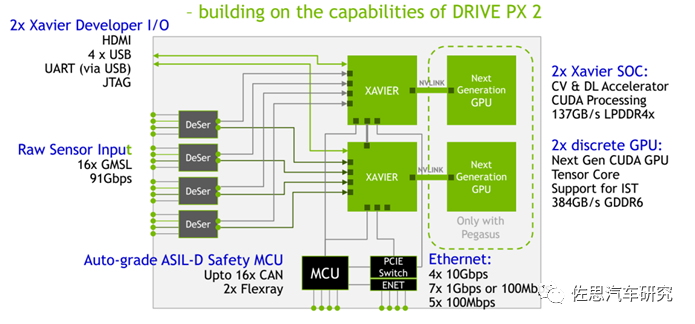
在自动驾驶领域,从第一代 Autopilot HW1 的 Mobileye Eye Q3;迭代到第二代的 Autopilot HW2,主要采用了Nvidia 的 Drive PX2,这里应用了一颗 Parker 和 Pascal GPU;在一年之后又迭代为 2 颗 Parker 和 Pascal GPU,即Autopilot HW2.5;而到了第三代特斯拉进入了芯片领域,采用了自己的 FSD 芯片;后续到第四代,特斯拉升级了自己的FSD芯片。
每代的详细情况,如下:
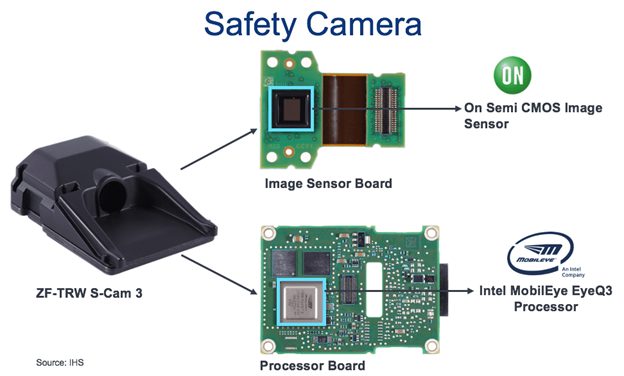
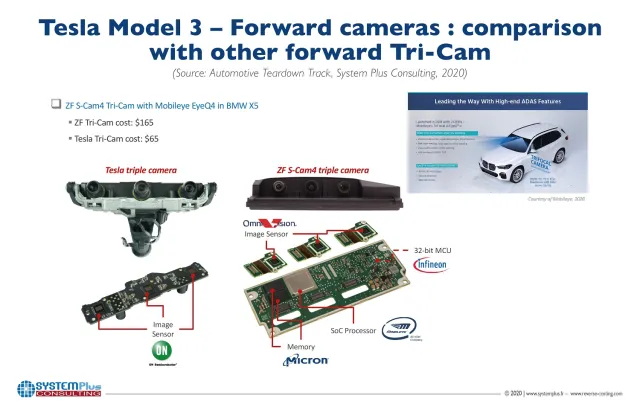
2、AP1 HW1.0 – Mobileye EyeQ3
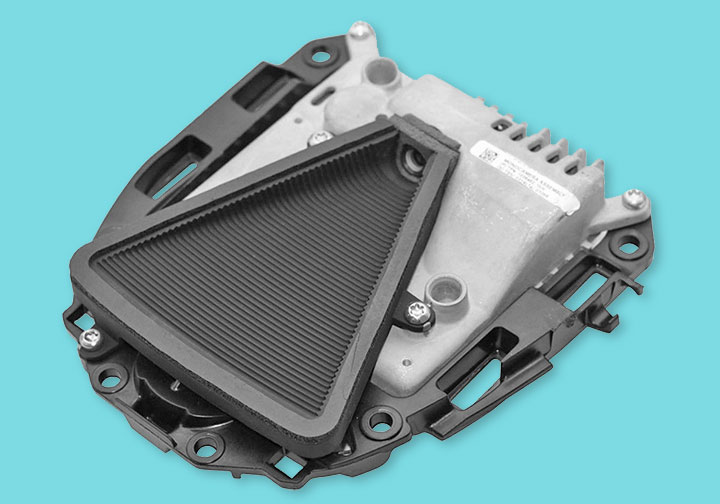
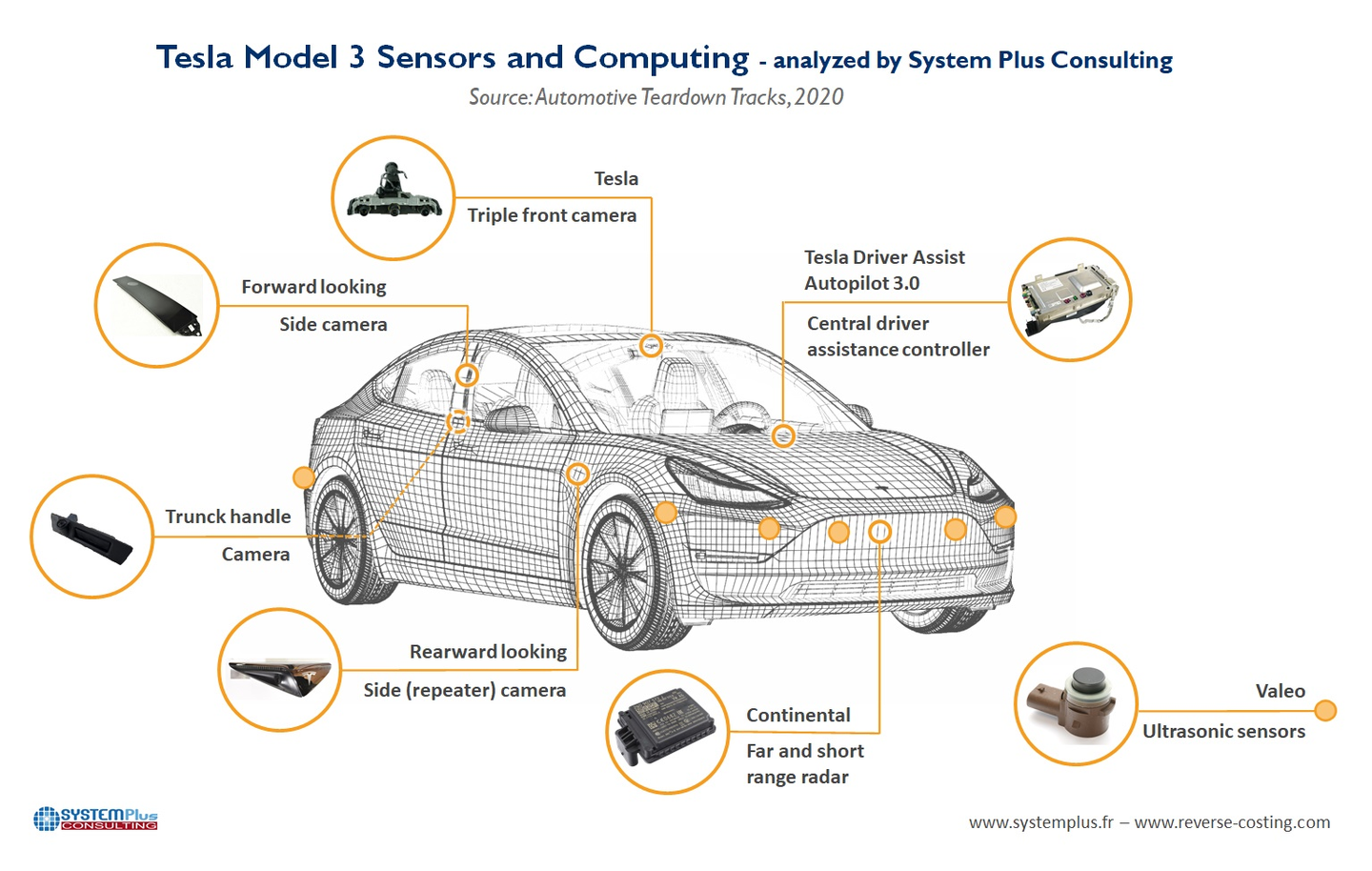
基于Mobileye芯片的第一代驾驶辅助硬件。它使用了Mobileye EyeQ3平台,全车共1个单色摄像头,单个前向毫米波雷达和12个超声波传感器,毫米波雷达是由博世提供,摄像头布置于后视镜附近,硬件选型都是基于市场上成熟的供应商产品,在HW1.0阶段特斯拉的主要工作是多传感器融合+应用层软件开发。
最初的 Autopilot 系统于 2014 年发布,并在 Model S 和 Model X 上配备。
它配备了一个前置摄像头和雷达来感知环境。
AP1 车辆于 2014 年至 2016 年生产。
AP1 的功能有限,包括交通感知巡航控制和自动驾驶。
AP1 Hardware Suite:
Front camera (single monochrome)
Front radar with range of 525 feet / 160 meters (Bosch Mid-range radar sensor)
12 ultrasonic sensors with 16 ft range / 5 meters
Rear camera for driver only (not used in Autopilot)
Mobileye EyeQ3 computing platform
AP1 Core features:
Traffic-Aware Cruise Control (TACC), start & stop
Autosteer (closed-access roads, like freeways)
Auto Lane Change (driver initiated)
Auto Park
Summon
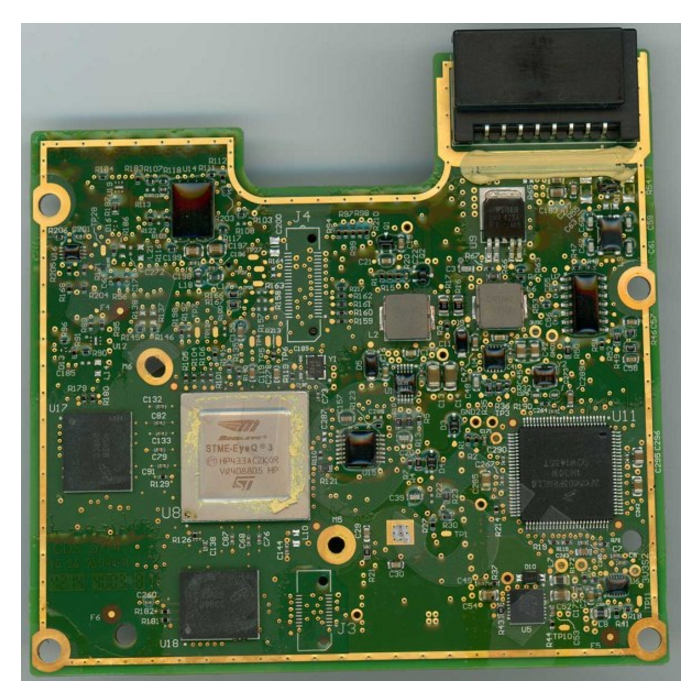
以上雷达目标和视觉目标都在Mobileye EyeQ3平台中处理,12个超声的处理不确定是否在Mobileye EyeQ3中。
3、AP2 HW2.0 – Nvidia Drive PX 2: 1 Parker SoC+1 Pascal GPU
Tesla 于2016 年7 月宣布(嫌Mbileye 太慢)自行开发全自动驾驶技术,基于Nvidia的Drive PX2系统打造了一个全新的AP2 硬件(位于手套箱下方),同时传感器数量大幅提升,使用8个摄像头,12个远程超声波传感器和一个前置毫米波雷达,这套传感器配置为特斯拉FSD功能打下良好的基础,现在回看当时的特斯拉传感器布局的前瞻性。特斯拉基于英伟达Drive PX2开发一个全新的驾驶辅助硬件,MCU芯片采用英飞凌TriCore系列产品,毫米波雷达仍然是博世产品,该驾驶辅助硬件安装于手套箱下方,这个阶段特斯拉掌握图像识别算法+多传感器融合+应用层软件开发。
AP2 的八个摄像头安装在了车辆周围,可提供 360 度全景视野,并配备了更强大的计算技术,而 AP1 则仅使用一个前置摄像头和雷达。虽然AP2并没有立即释放所有潜在功能,但这使 AP2 能够执行更复杂的操作,原因如下:
3、AP2 HW2.0 – Nvidia Drive PX 2: 1 Parker SoC+1 Pascal GPU
Tesla 于2016 年7 月宣布(嫌Mbileye 太慢)自行开发全自动驾驶技术,基于Nvidia的Drive PX2系统打造了一个全新的AP2 硬件(位于手套箱下方),同时传感器数量大幅提升,使用8个摄像头,12个远程超声波传感器和一个前置毫米波雷达,这套传感器配置为特斯拉FSD功能打下良好的基础,现在回看当时的特斯拉传感器布局的前瞻性。特斯拉基于英伟达Drive PX2开发一个全新的驾驶辅助硬件,MCU芯片采用英飞凌TriCore系列产品,毫米波雷达仍然是博世产品,该驾驶辅助硬件安装于手套箱下方,这个阶段特斯拉掌握图像识别算法+多传感器融合+应用层软件开发。
AP2 的八个摄像头安装在了车辆周围,可提供 360 度全景视野,并配备了更强大的计算技术,而 AP1 则仅使用一个前置摄像头和雷达。虽然AP2并没有立即释放所有潜在功能,但这使 AP2 能够执行更复杂的操作,原因如下:
更好的传感器套件:新的摄像头、雷达和超声波传感器可以实现更好的物体和车道标记检测。
改进的自动驾驶和车道保持功能:车道保持能力提升,尤其是在高速公路上。
首次推出召唤和自动泊车功能:更先进的泊车功能,可实现远程驾驶。
采用Machine Learning Neural Network 令汽车可以不断跟据之前行驶路段学习。
AP2 Hardware Suite:
Front cameras (3 cameras, medium, narrow and wide angle)
Side cameras (4 total, 2 forward and 2 rear-facing, on each side)
Rear camera (1 rear-facing)
Front radar with range of 525 feet / 160 meters (Bosch Mid-range radar sensor)
12 ultrasonic sensors with 26 ft range / 8 meters
NVIDIA DRIVE PX 2 AI computing platform
AP2 Core features:
Traffic-Aware Cruise Control (TACC), start & stop
Autosteer (closed-access roads, like freeways)
Auto Lane Change (driver initiated)
Navigate on Autopilot (on-ramp to off-ramp)
Auto Park
Summon
智慧召唤– Smart Summon
NoA – 自动驾驶导航




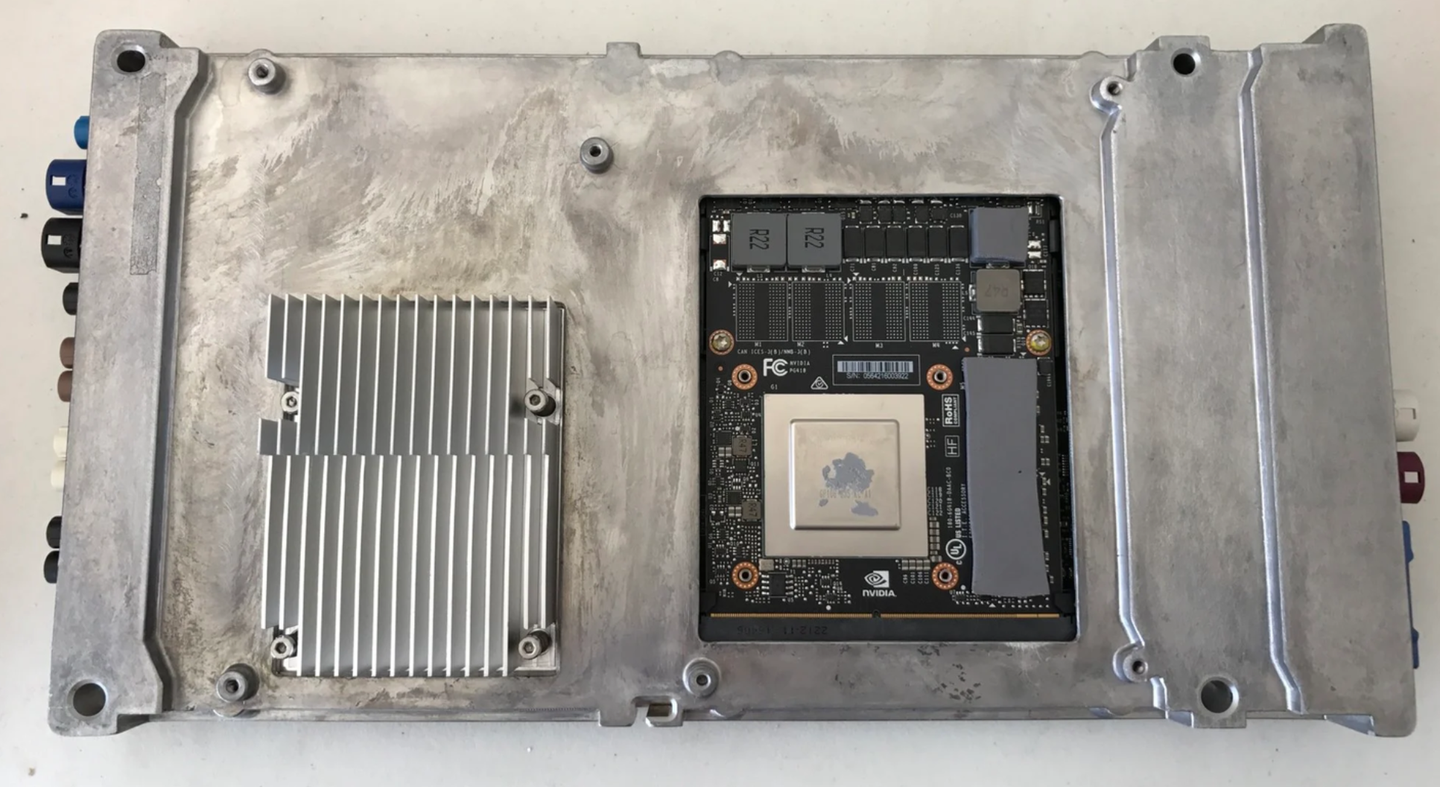


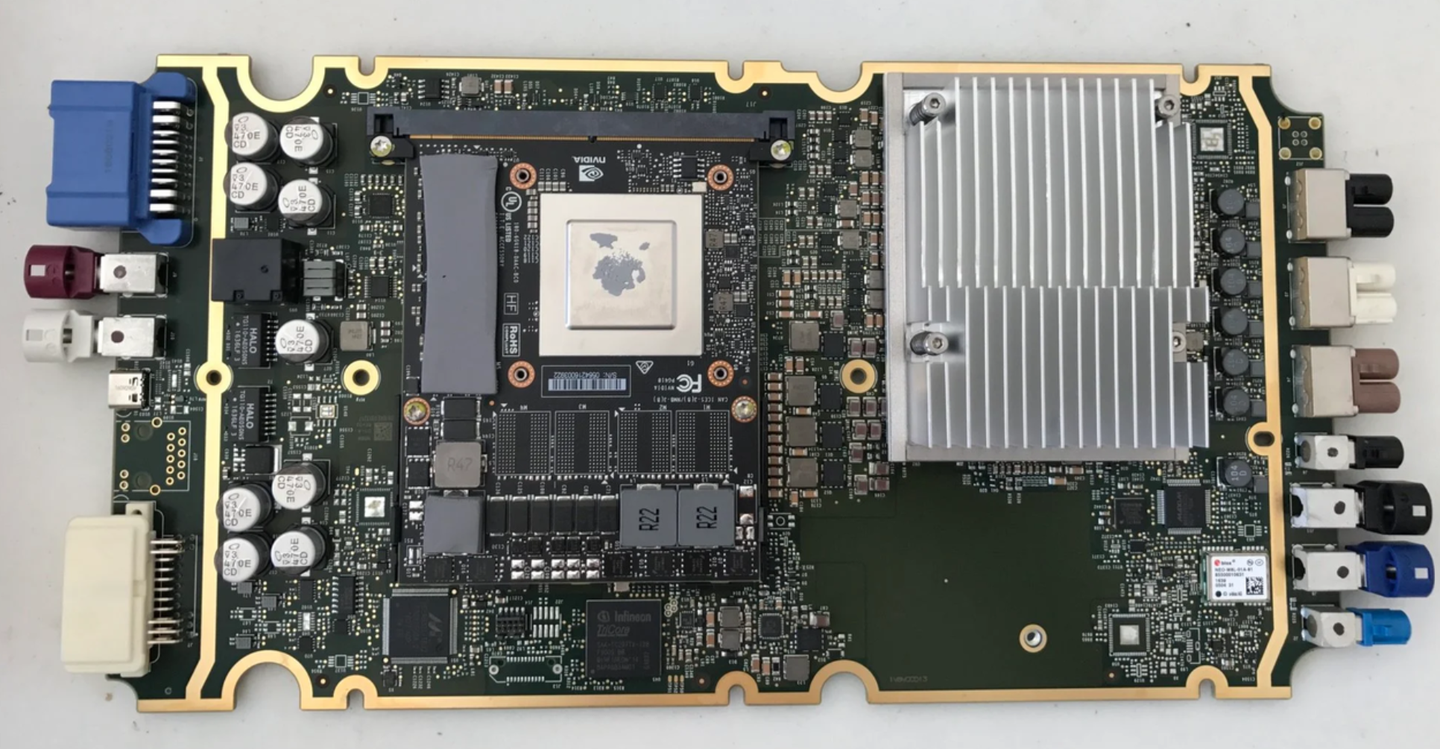
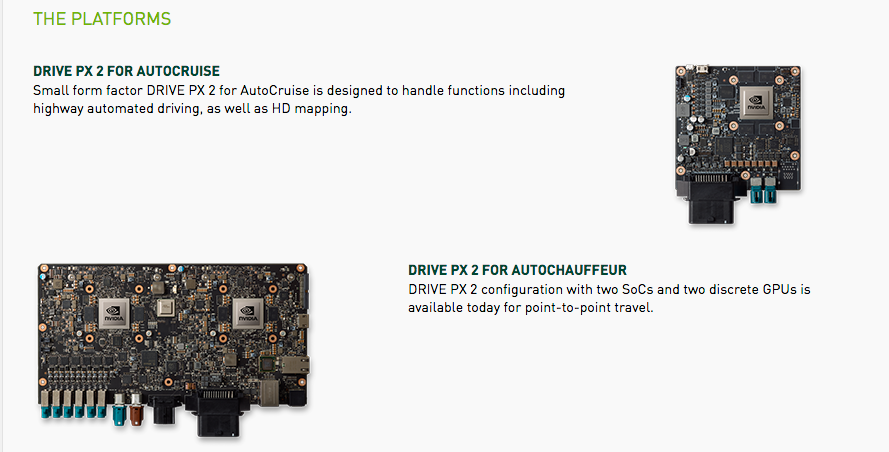
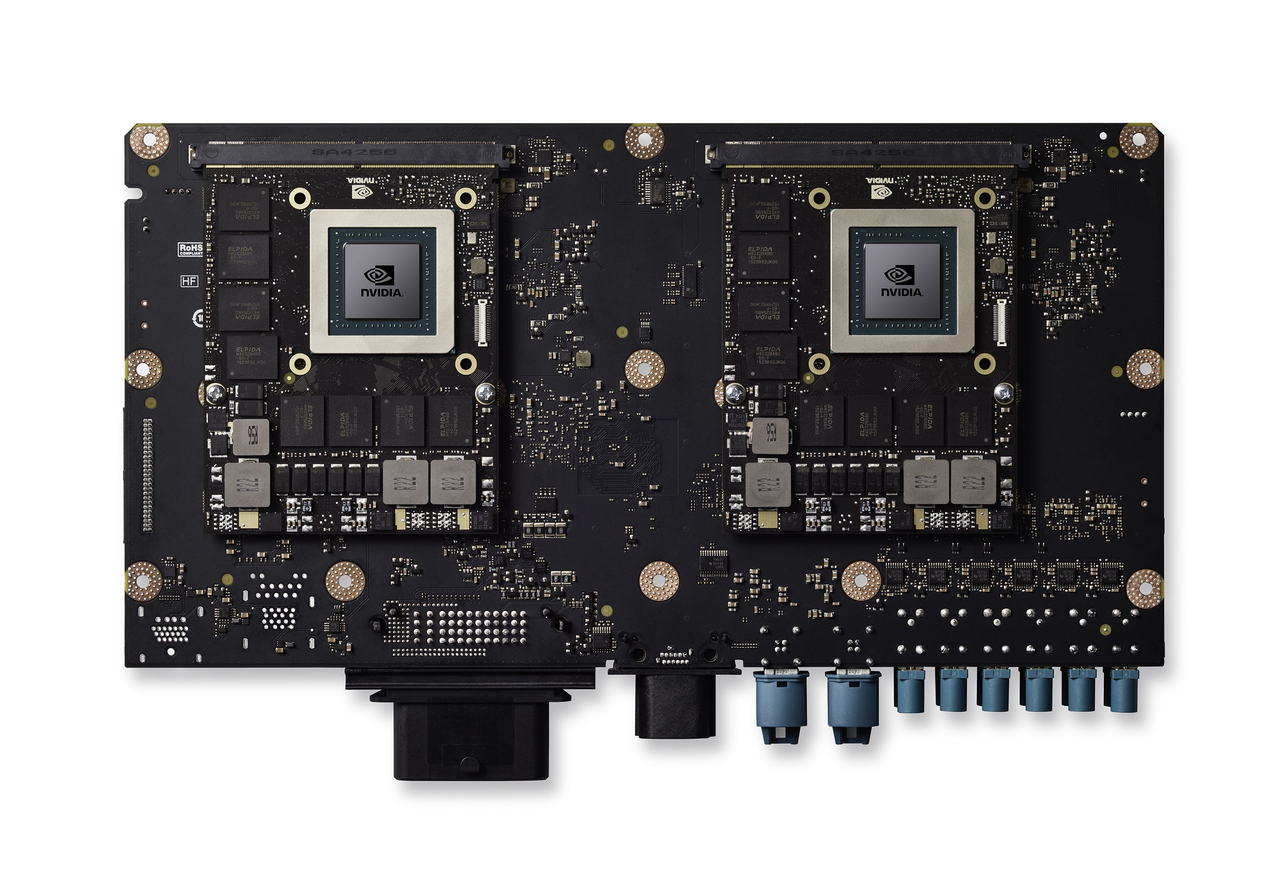
需要明确的是 HW2.0 的方案是1 Parker SoC+1 Pascal GPU;而图23和图24并没有在实际产品中出现。
Ref:https://teslamotorsclub.com/tmc/threads/inside-the-nvidia-px2-board-on-my-hw2-ap2-0-model-s-with-pics.91076/
4、AP2.5 HW2.5 – Nvidia Drive PX 2:2*Parker SoC+1 Pascal GPU
AutoPilot2.5 (AP2.5) – 系统升级于 2017 年年中推出,在 AP2 的基础上进行了小幅改进。虽然计算机处理能力和传感器集成度有所提升,但硬件基本保持不变。AP2.5 中更强大的机载计算机增强了AutoPilot的整体功能和可靠性。
提高处理能力:更强大的车载计算机可以实现更快的数据处理,从而提高车辆的决策速度和准确性。
略微改进的摄像头和传感器:为了提高性能和集成度,对摄像头和传感器进行了微调。
正在进行的自动驾驶和召唤开发:尽管 AP2.5 仍然缺乏特斯拉所追求的复杂功能,但它增强了现有的功能。
到 AP2.5 发布时,特斯拉已经开始解锁更多高级功能,例如 Summon(使车辆能够自行驶出停车位或到达车主所在地)和 Autopilot 穿越(可以穿越高速公路立交桥和出口)。 传感器升级:主要将前置雷达换成更长距离既Continental Advanced Radar Sensor ARS410 及将黑白镜头换成彩色镜头,功能上与AP2 并无很大差异;
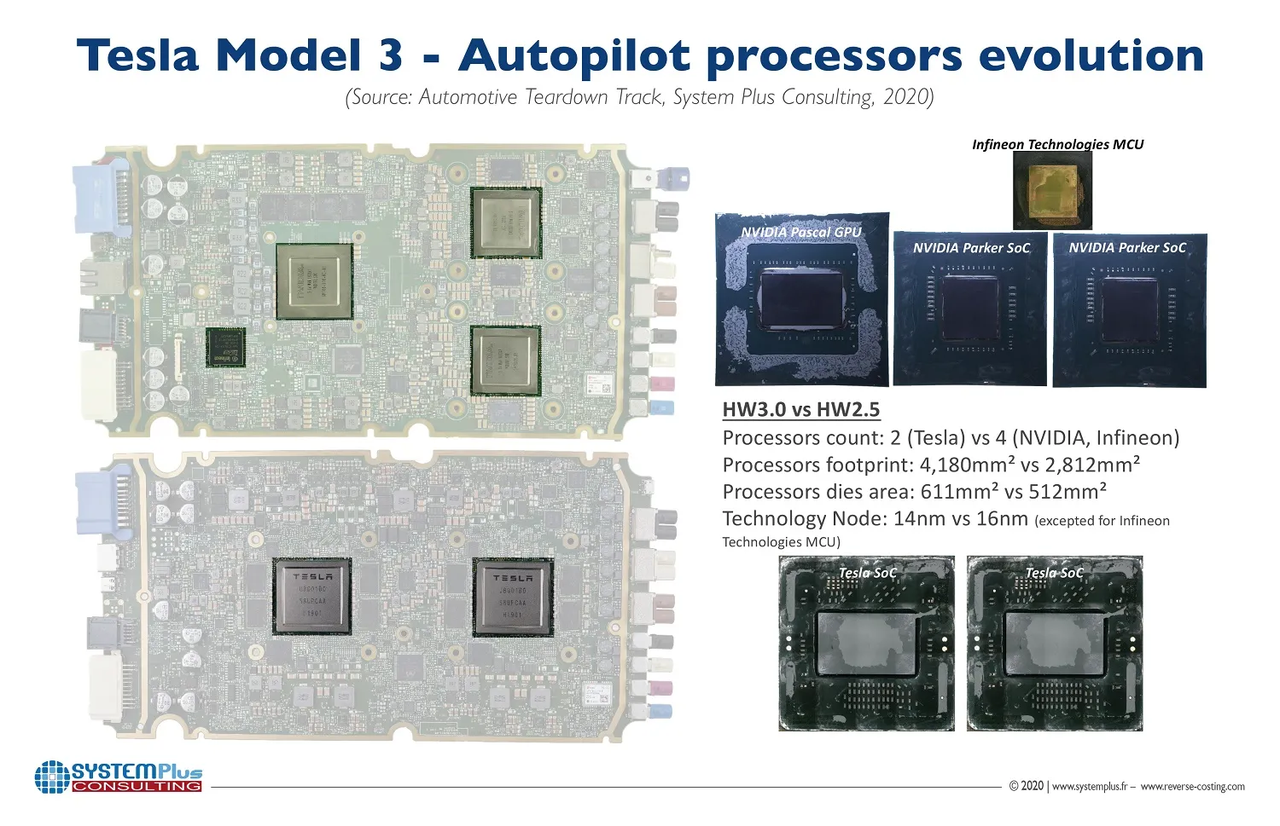
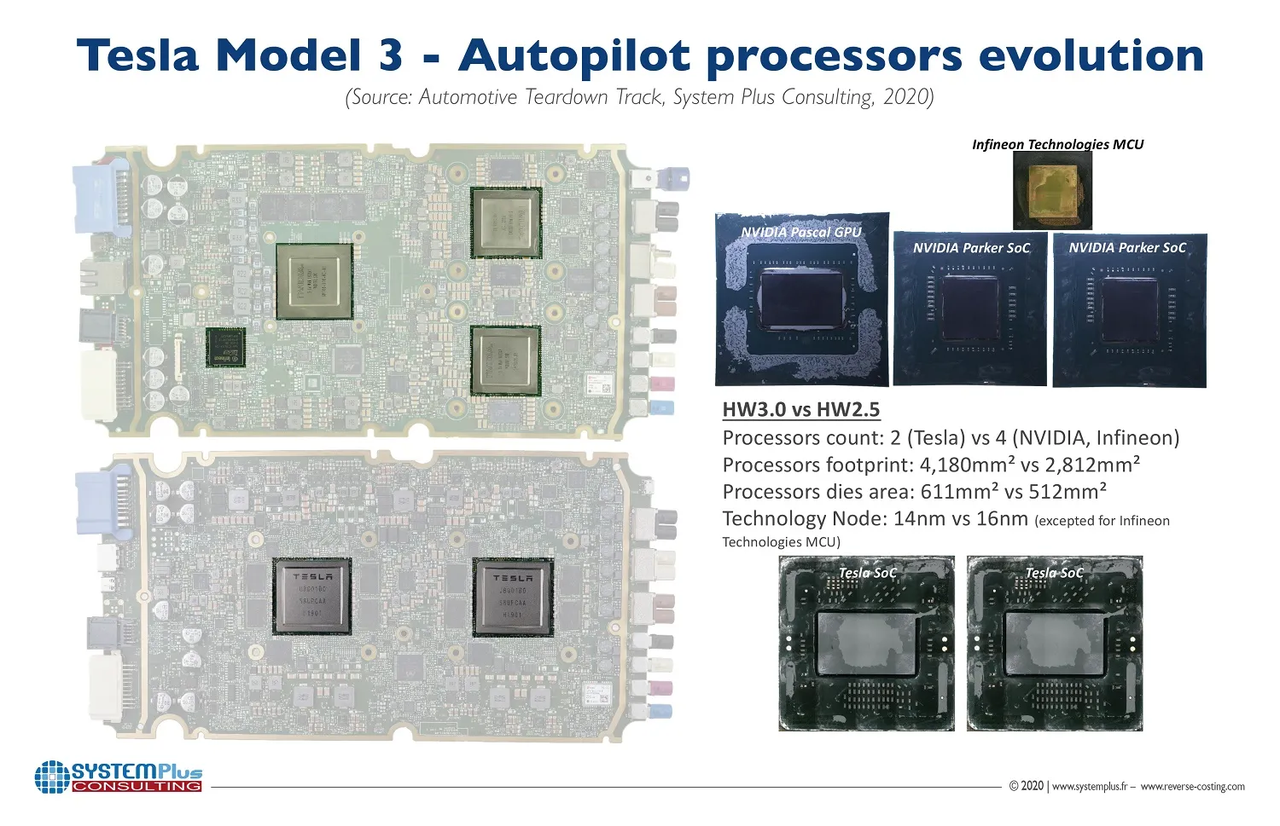
HW2.5是对HW2.0的一个小版本更新,主要用于冗余和略微提高的可靠性。从1 Parker SoC+1 Pascal GPU升级到2 Parker SoC+1 Pascal GPU;
另外AP2.5版本还新增两个功能:行车记录仪和带有本地保存视频的哨兵模式。
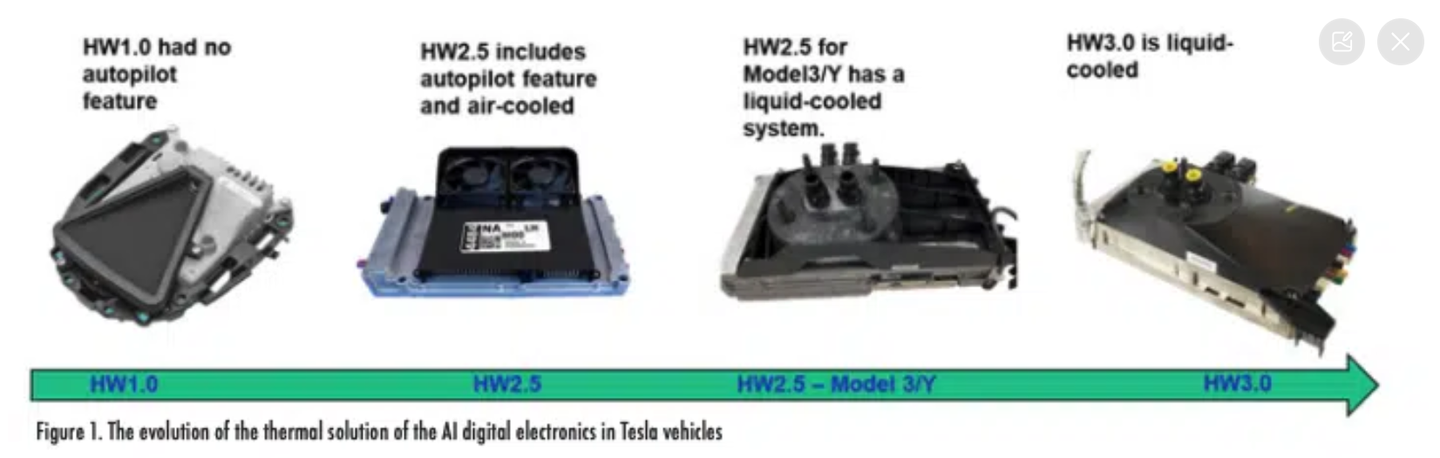
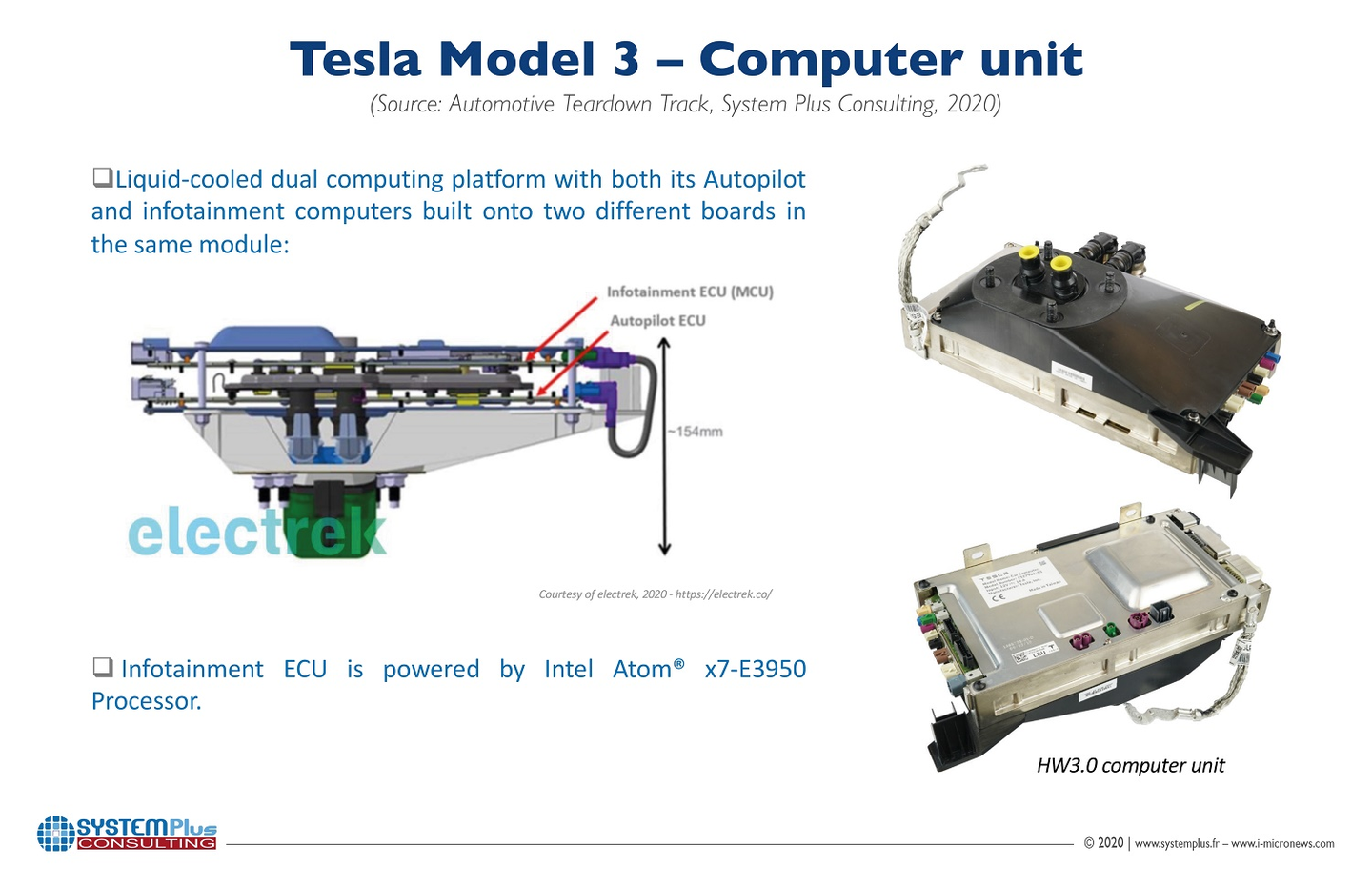
另外HW2.5开始使用汽车冷却液回路中的液体冷却而不是风扇。
Ref:https://news.eeworld.com.cn/qcdz/ic495216.html
5、AP3 HW3.0 – FSD一代
特斯拉在 AP3 中开始区分 Autopilot 和全自动驾驶 (FSD) 套件。尽管 Autopilot 3.0 仍然只是部分自动驾驶,但随着特斯拉致力于打造一个能够执行更复杂任务的系统,这是迈向完全自动驾驶的重要一步。 Autopilot 3.0 的显著特点包括完全自动驾驶计算机(FSD),这是一种专门的人工智能芯片,可以分析比之前技术更多的数据,使特斯拉能够不断改进其自动驾驶汽车软件。
更快的数据处理:通过更快地处理传感器数据,新计算机可以更精确、更平稳地控制车辆的移动。
使用AutoPilot进行导航改进:特斯拉开始为AutoPilot导航提供越来越复杂的功能,包括在很少的用户交互下自动驶出匝道和自动变换车道。
其他全自动驾驶功能(测试版):特斯拉的 FSD Beta 功能可让车辆在城市街道上自动驾驶、转弯、在停车标志处停车以及在更复杂的路口行驶,并可由 AP3 硬件支持。
Autopilot 2.5 和 3.0 不仅在硬件方面有所不同,在软件功能方面也存在差异。提高自动化程度所需的复杂机器学习和神经网络可以由 AP3 的计算机处理。
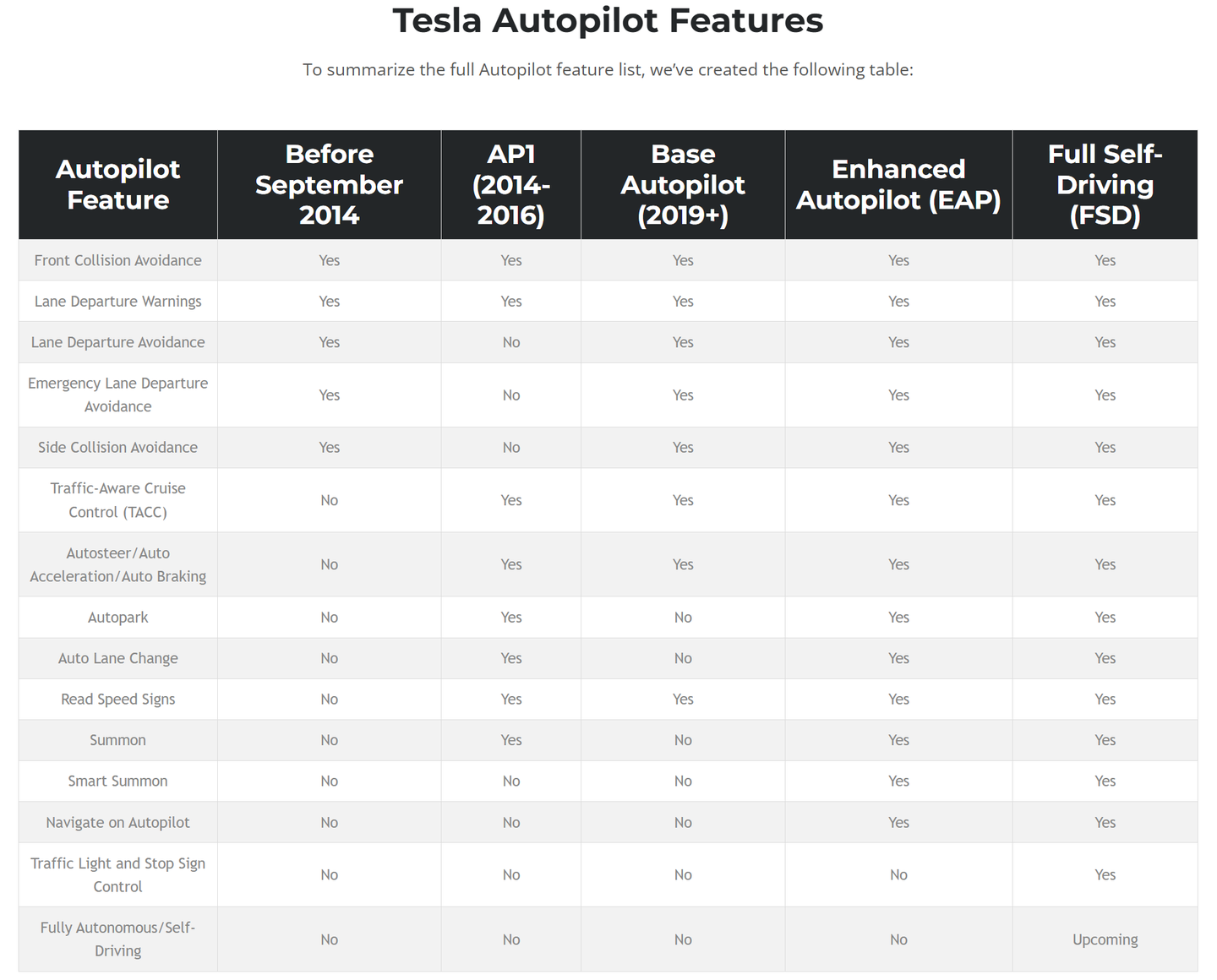
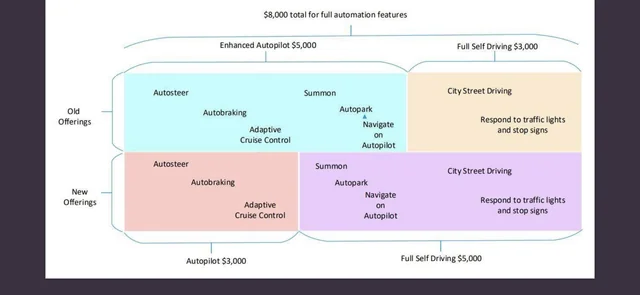
增强型AutoPilot是特斯拉汽车的可选驾驶辅助系统。(图7中的EAP)
该系统使用多种传感器,包括超声波传感器、摄像头和 GPS,实现自动转向、速度调节和自动停车等功能。
增强型AutoPilot允许车辆制动并调整速度,这使其成为自动驾驶功能的关键特性。
Ref:https://news.eeworld.com.cn/qcdz/ic495216.html
8个Camera的Image Sensor均采用AR0136AT
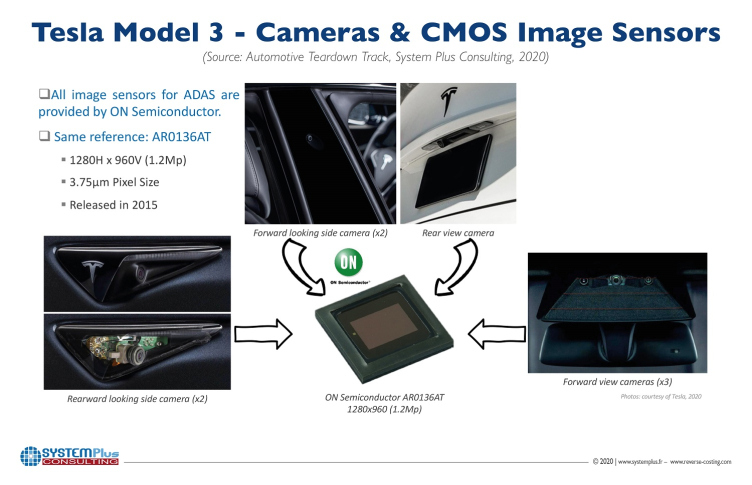
只更换镜头,就可以配置不同的FOV和探测距离的Camera

不在Camera端进行图像处理,Camera只负责采集,数据处理放到自驾域控中,Camera端的成本下降比较大

Tesla 于2018 年底曾经宣布自行开发AP 硬件,弃用其他厂牌晶片,而AP3 则是其完全自主研发的AP 电脑,Tesla 称之为Full Self-Driving Computer (FSD Computer)。此组晶片于2019 年4 月正式用于全线Tesla 品牌汽车上。现有AP2 或AP2.5 车主如已购买全自动驾驶配置,将可以免费升级硬件。 AP3 可用功能包括:
定速巡航 – Traffic-Aware Cruise Control
自动转向– Autosteer
自动切线– Auto Lane Change
自动泊车– Auto Park
召唤– Summon
智慧召唤– Smart Summon
NoA – 自动驾驶导航
Tesla 于2021 年低调将AP 硬件更新至3.2 版本(Part # 1566786-S1-C),暂时网上极少资料及讨论,估计系提升MCU 及AP 电脑之间既资料传输速度。
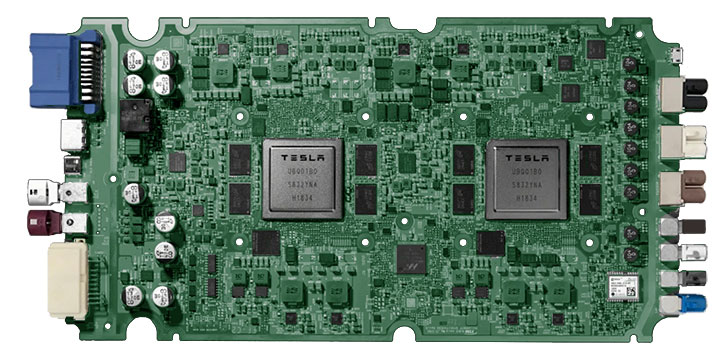
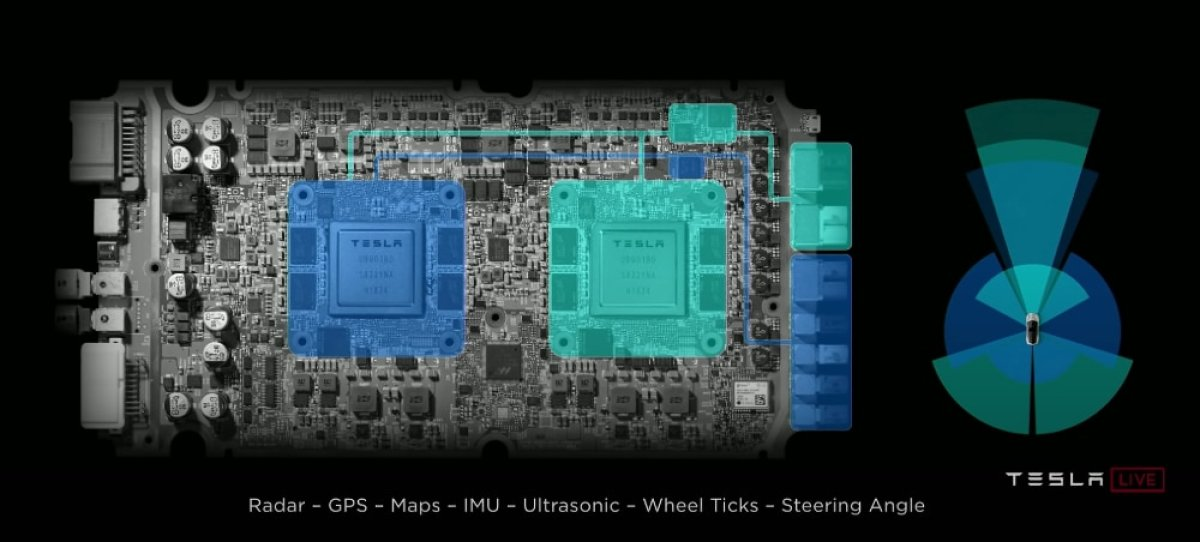
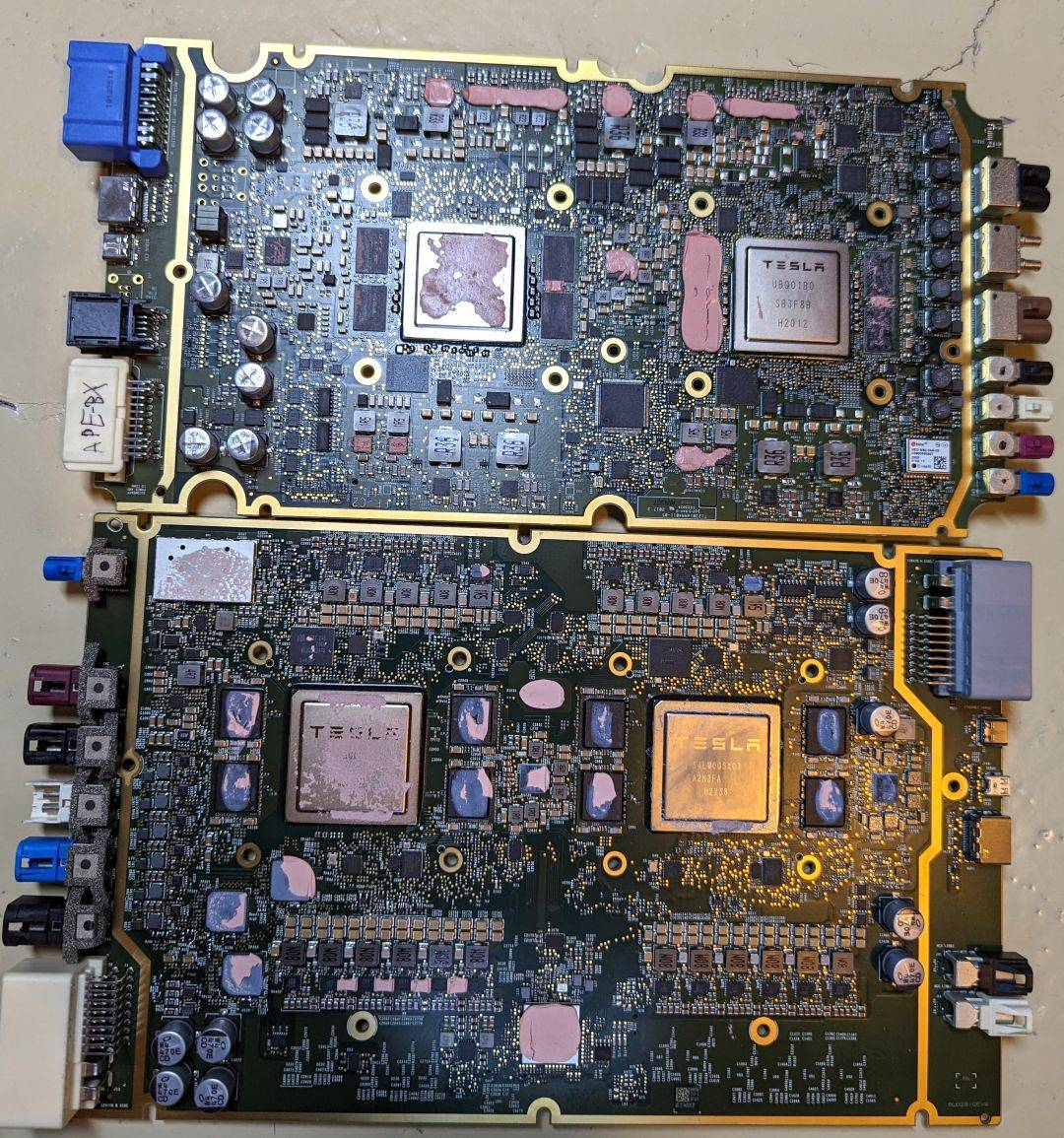
早在2016年初,特斯拉就启动了全自动驾驶(FSD)计算机(也称为硬件3,简称HW3)的研发工作,当时他们意识到市场上没有其他好的解决方案。两年后,也就是2018年末,FSD计算机正式投入生产。
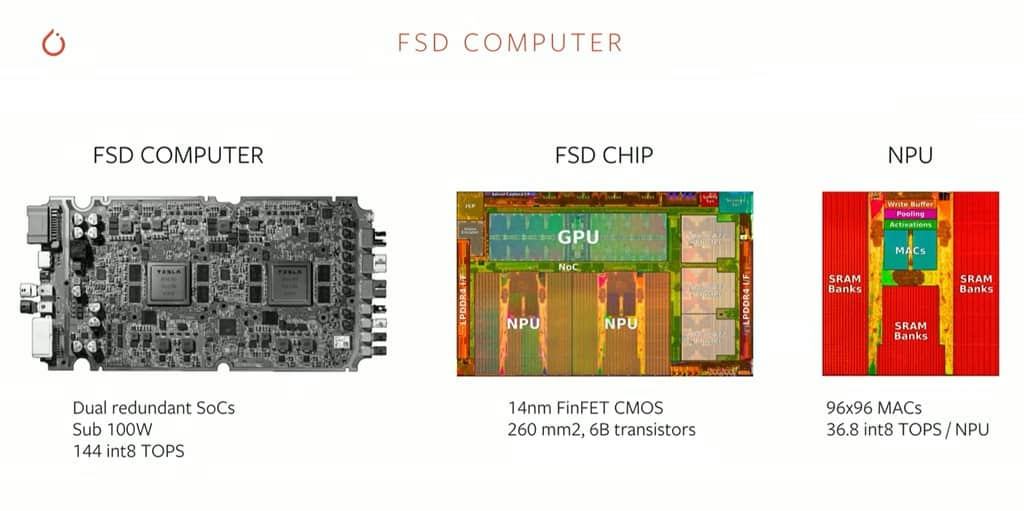
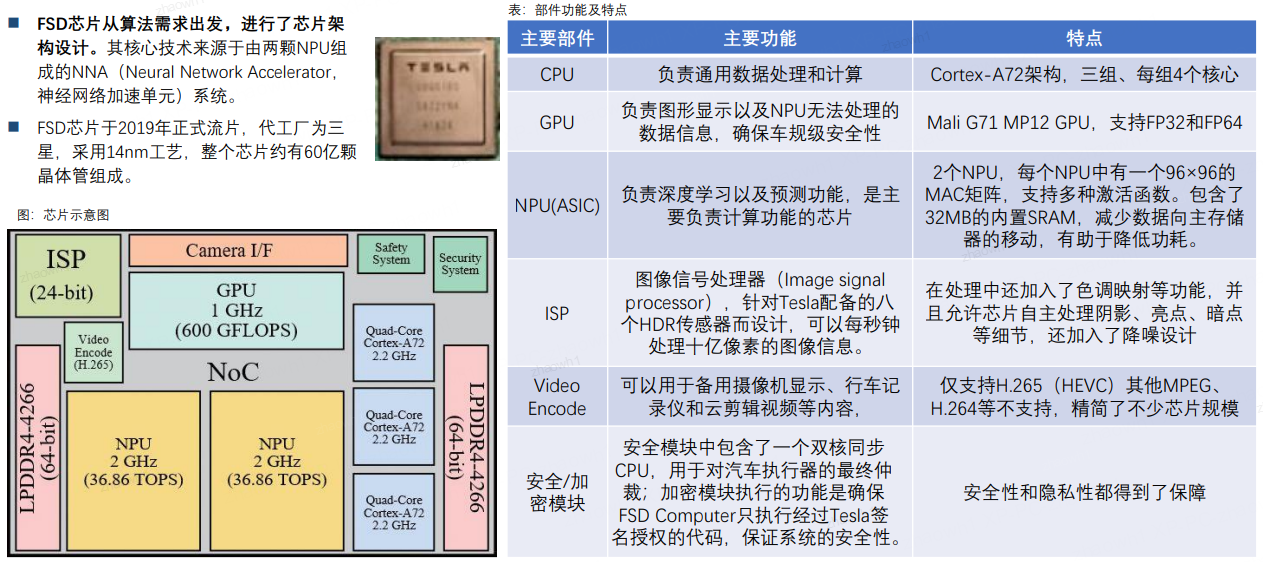
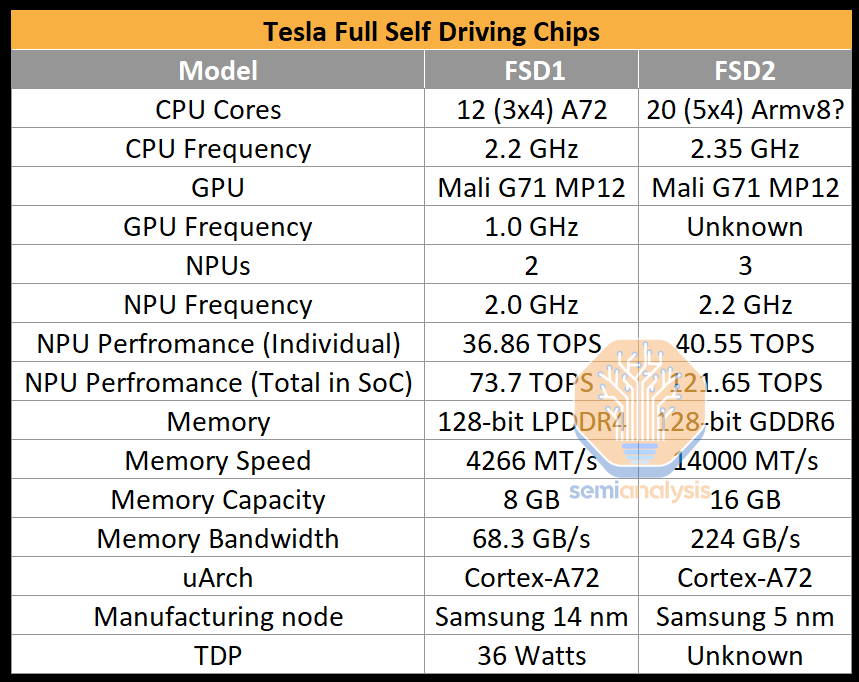
HW3.0 FSD采用三星 14 纳米工艺制造,集成 3 个四核 Cortex-A72 集群,共计 12 个 CPU,主频为 2.2 GHz。它还配备了一个定制设计的神经网络加速器,可提供高达 36 TOPS(万亿次运算/秒)的性能。 HW3.0取代了自 2016 年底以来在特斯拉汽车上使用的 NVIDIA DRIVE PX 2 AI 计算平台HW2.0(或 AP2)。HW3.0的性能明显高于 NVIDIA 平台,后者最高只能提供 21 TOPS 的性能。
特斯拉于2019年4月/5月左右开始在其所有车型上安装HW3。新硬件使特斯拉能够改进其FSD功能,例如自动驾驶导航、智能召唤、交通信号灯和停车标志控制以及FSD Beta测试版。新硬件还为显示屏添加了更多可视化功能,例如交通信号灯、交通锥、垃圾桶以及道路上绘制的转向箭头。
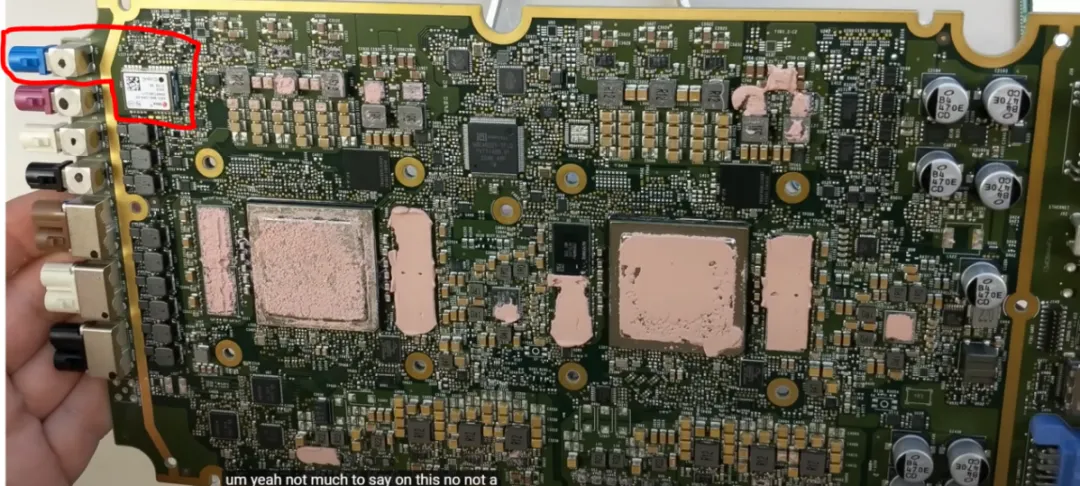
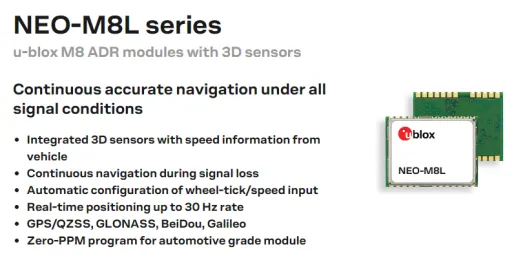
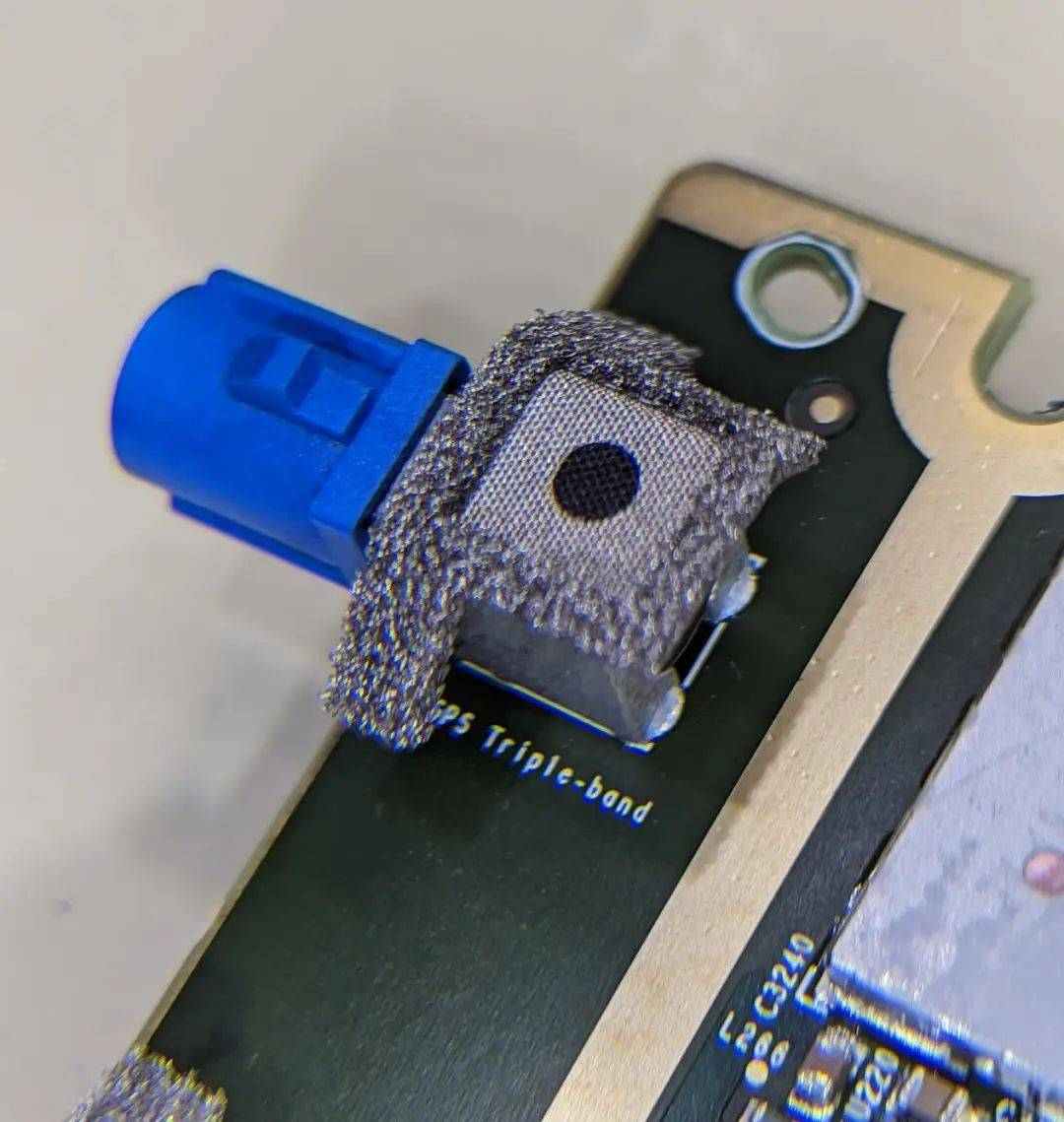
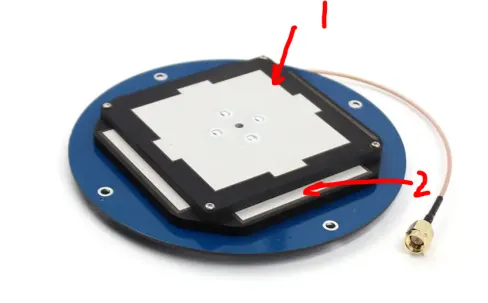
在HW3.0上,特斯拉使用了UBLOX生产的M8L,主要问题是仅支持单频GNSS(GPS BEIDOU),容易丢失GNSS卫星信号。M8L在静态、低速状态下的定位精度在2m左右波动,属于低端产品。 由于消费级GPS已经集成在LTE模块中,在FSD上使用同样低端的M8L显得有些过时。从下图可以看出,天线上只有一个贴片,因此只能支持一个频段。

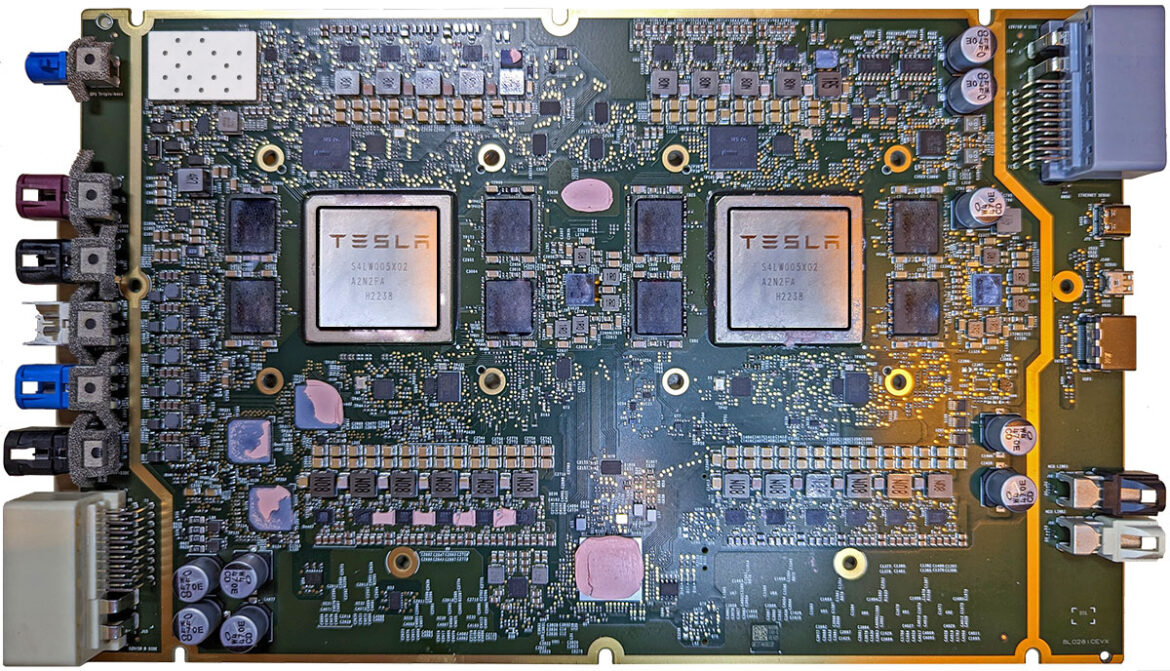
6、AP4 HW4.0 – FSD二代
HW4.0 – 是使用特斯拉第二代芯片设计的最新 Autopilot ECU 更新版本。据称,它的神经网络性能是 HW3 的三倍。它最初出现在 2023 年 3 月的 Model S/X 车型中,后来也应用于其他车型。由于尺寸、设计和连接器略有不同,因此不太可能作为 HW3 的升级版提供。
AI3 / HW3 (FSD Computer 1) | AI4 / HW4 (FSD Computer 2) |
|---|---|
Samsung Exynos-IP Based | Samsung Exynos-IP Based |
12 CPU Cores | 20 CPU Cores |
CPU Frequency: 2.2 Ghz | CPU Frequency: 2.35 Ghz |
2 Neural Network (NN) Processors | 3 Neural Network (NN) Processors |
NN Processor Frequency: 2.0 Ghz | NN Processor Frequency: 2.2 Ghz |
14 nm Process | Estimated TSMC’s 7nm or N4 (4nm class) |
36 TOPS | 50 TOPS |
1.2MP cameras around the car | 5MP cameras around the car |
Radar previously used was Continental’s ARS410 with a range of 160 meters. Discontinued in 2021. | TI 2243*2 6T8R and a 300 meter range. |
配套的AP4系统新硬件包括以下内容:
新型前置摄像头,分辨率更高,视野更宽(某些型号,例如 Cybertruck)。
每个 B 柱上都装有一个新的摄像头,可以观察侧面和稍微向前的情况。
每个 C 柱上都装有一个新的摄像头,可以观察侧面和稍微向后的情况。
新型后置摄像头,分辨率更高,视野更宽。
具有更高分辨率和更宽视野的新型客舱摄像机。
每个挡泥板上都安装了一个新摄像头,可以看到车辆后方的情况(有待确定,传闻)
车辆两侧各安装两个新摄像头,安装位置比以前更低、更靠前(有待确定,传闻)
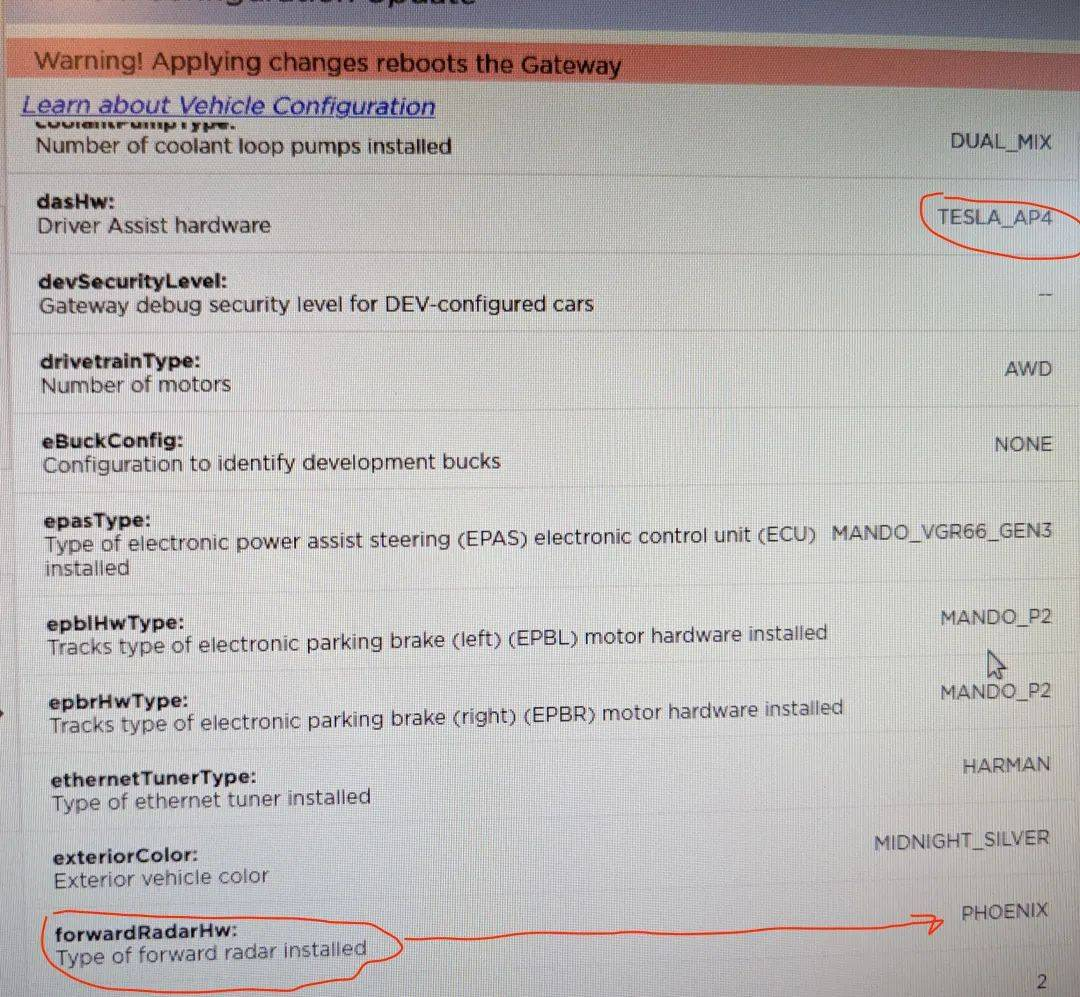
预计新雷达将被称为“凤凰”,其精度将高于之前的雷达。
新硬件最多可添加 12 个摄像头,而 HW3 中只有 9 个摄像头。电路板上的一个摄像头连接器标有“备用”,这表明特斯拉未来可能会添加另一个摄像头。


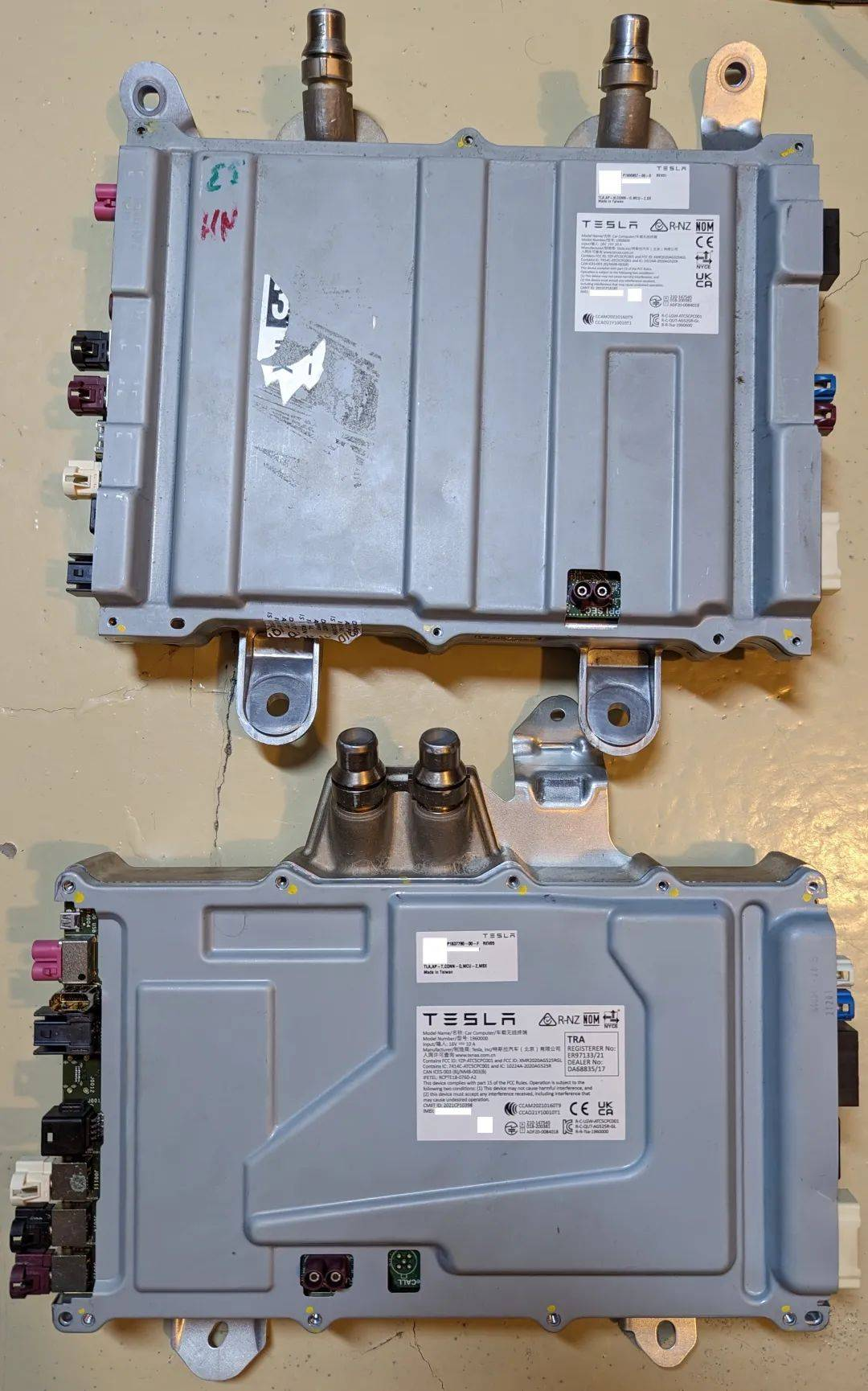
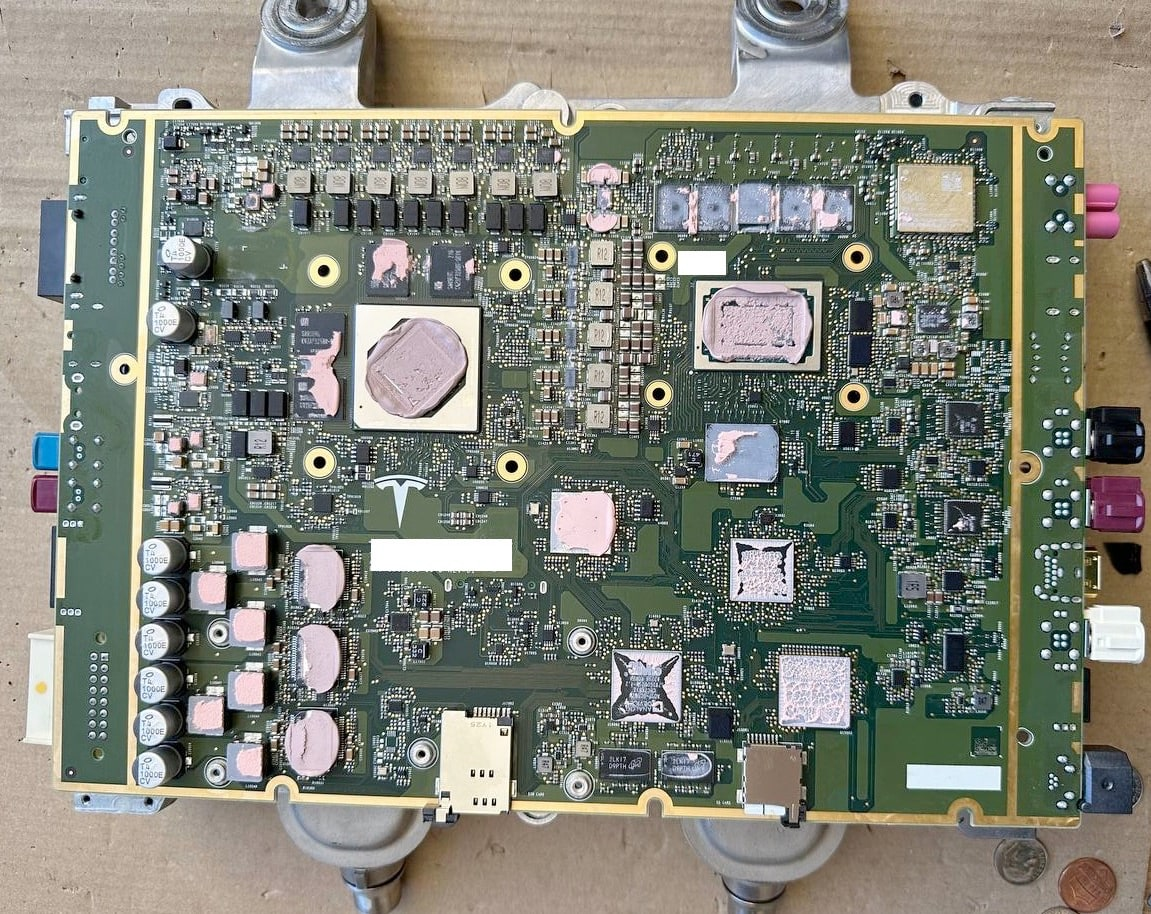
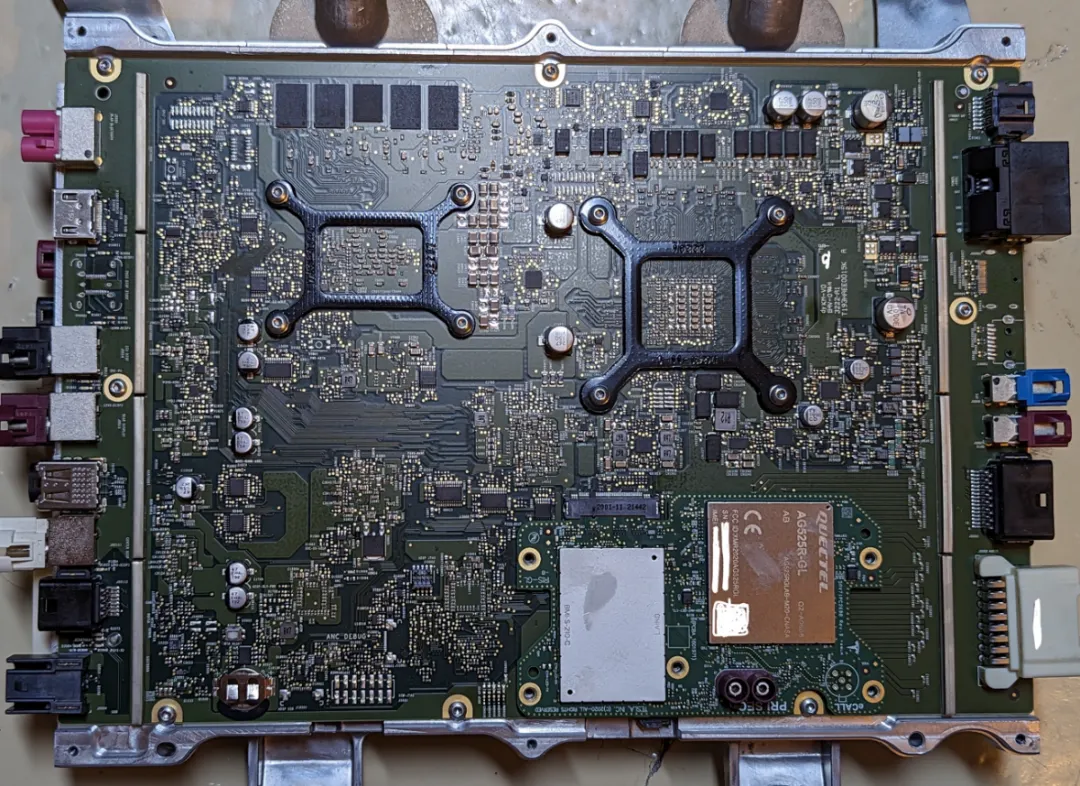
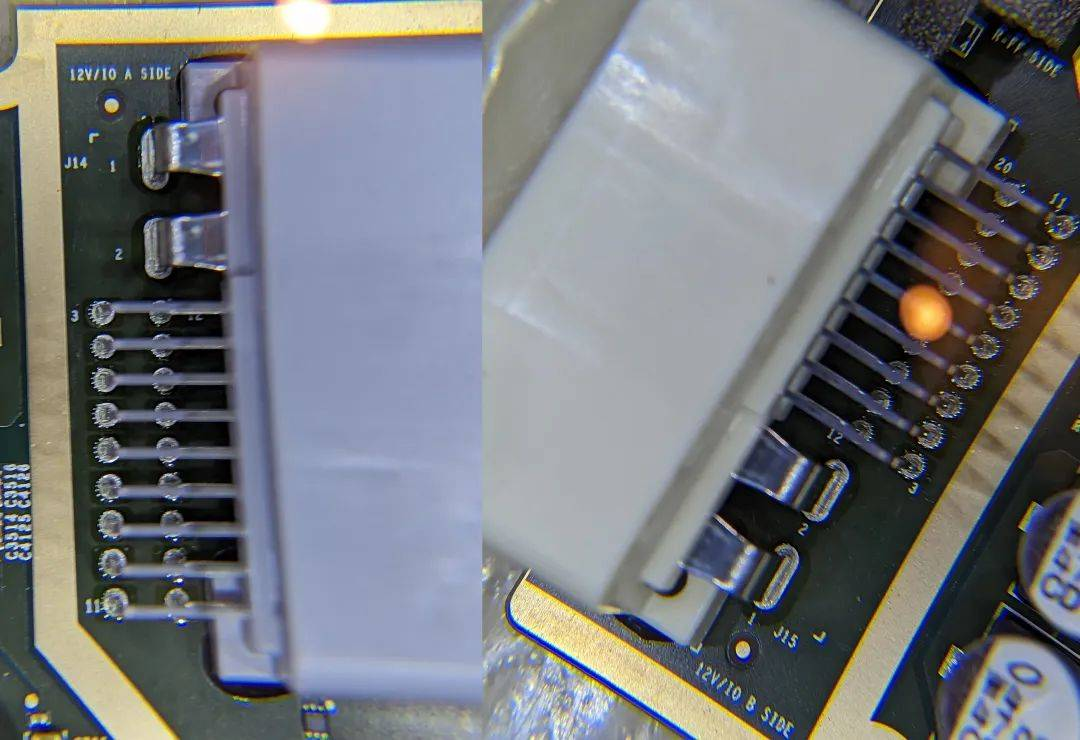
全新的 FSD 芯片属于改良而非重新构建,毕竟 Jim Keller 大神也离职了,芯片依然基于三星的 Exynos 架构,但是 CPU 核心从之前的 12 个增加到了 20 个,最高频率 2.35GHz,低功耗频率 1.37GHz,TRIP 内核数量从 2 个增加到 3 个,最高频率 2.2GHz。 全新全自动驾驶计算机(FSD Computer 2)预计将比硬件 3 快 2 到 4 倍,处理能力显著提升。它同样基于与前代相同的三星 Exynos 架构,但此次迭代的性能更胜一筹,每侧 CPU 核心数量从 12 个增加到 20 个,每个核心的最高频率为 2.35 GHz,空闲速度为 1.37 GHz。神经网络加速器也得到了改进,性能高达 50 TOPS,而 HW3 仅为 36 TOPS。 同之前的 HW3.0 一样,每辆车也提供了两块 FSD 芯片,提供双重算力的时候也可以做到冗余,使得整个 PCB 看起来也呈现对称的状态,两侧的电源接口相同,也具备两个 MCU 的连接模块,但目前来看,HW4.0 还不能做到真正意义上的完全冗余,如果一侧电源失效,依然会让整个系统的数据连接出现问题。

GNSS小幅升级
HW4.0的天线接口和芯片位置基本保持不变,但芯片封装从近似正方形变成了1:2的矩形。根据之前的报道,HW4.0的GNSS天线也发生了变化,因此推测特斯拉更换了GNSS芯片供应商。
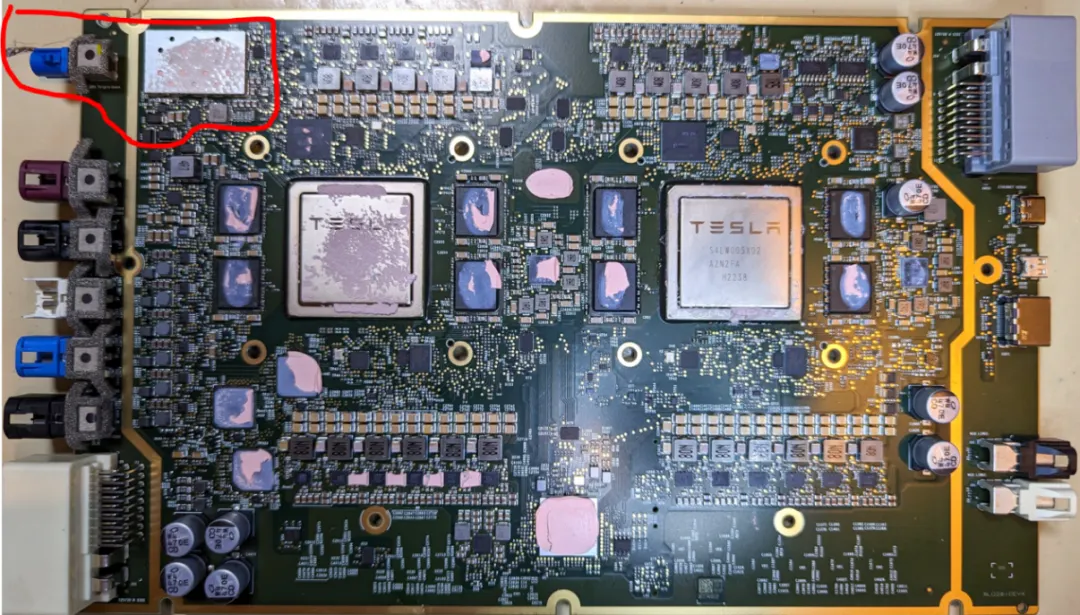
GNSS 模块也得到更新,拥有更强性能的三频天线,之前欧洲的申报文档中就曾说明,这个新的模块会让其他国家标准的全球定位系统也得到受益。
市面上符合车规的GNSS芯片并不多。目前UBLOX F9P在国内新势力中应用较为广泛,性能与测绘RTK接收机相差无几。但主要问题在于价格过高(散片1574.09元)。或许用价格更低的M9 F9h的可能性更大,但是有一点疑点就是包装上没有UBLOX的标志。

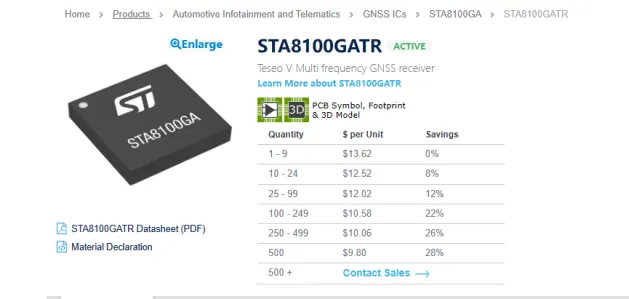
国内另一个主流方案是ST 8100 9100。这款芯片性能未知,但也通过了AECQ100车规认证,支持L1 L5双频甚至L2 E6,信号质量和卫星捕获能力远胜M8L。相对而言,ST的价格有一定优势,Demo板上的封装也是矩形的。特斯拉也可能跟随国内GNSS供应商(如中国移动、中测)采用ST方案。

但单独使用ST是无法实现RTK的,需要做成模块,再加RTK算法。Mobile有基于ST 8100的RTK方案。 第三种可能性是方案比较少,比如SWIFT、华大北斗也有类似的高精度定位方案,这种可能性也是存在的。 值得注意的是,双天线配置至少有两个优点:一是可以在低速下获取高精度航向信息,避免机载导航和IMU的初始化;其次,主从天线互为备份,大大增加了系统的鲁棒性,更容易满足上述ASIL-B的要求。 无论HW4.0具体采用哪款芯片,都可以清晰地看出特斯拉已经彻底放弃了单频单点定位的低端方案,转向了多系统多频方案。不过,是否采用PPP RTK技术,从外观上来看,希望不大。 对于高精度定位市场,目前国内市场UBLOX和ST占据半壁江山,但UBLOX在海外市场占据绝对优势。
雷达:自研6T8R的4D雷达
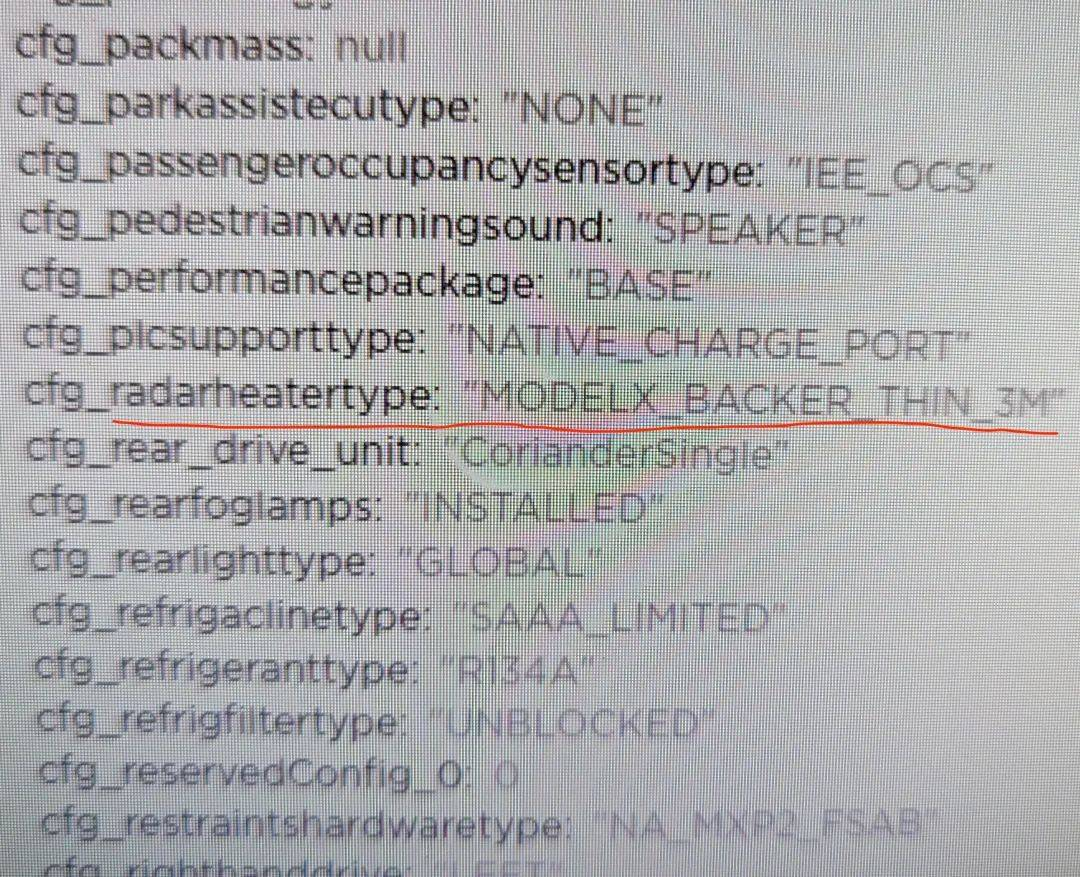
在特斯拉于 2021 年转向纯视觉系统后,HW4.0 加回了雷达(一款名为 Phoenix 的高清雷达),代号 Phoenix(凤凰)的雷达还拥有自己的加热器,保证了更好的全天候性能。
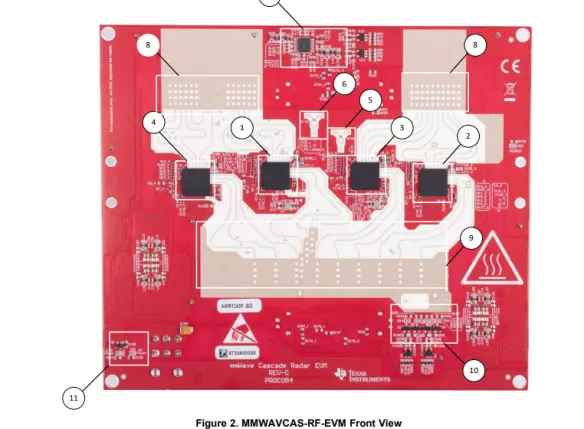
此次将HW4.0重新搭载到毫米波雷达上,被业界广泛誉为新一代4D毫米波。根据照片来看,该方案初步分析应该是六发射八接收的级联方案,采用MIMO雷达体制。TI的2243双级联方案。
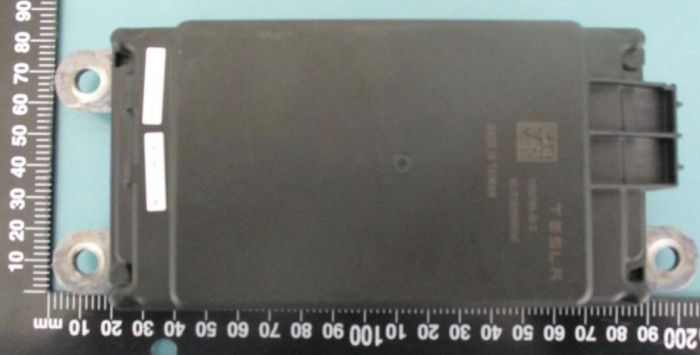
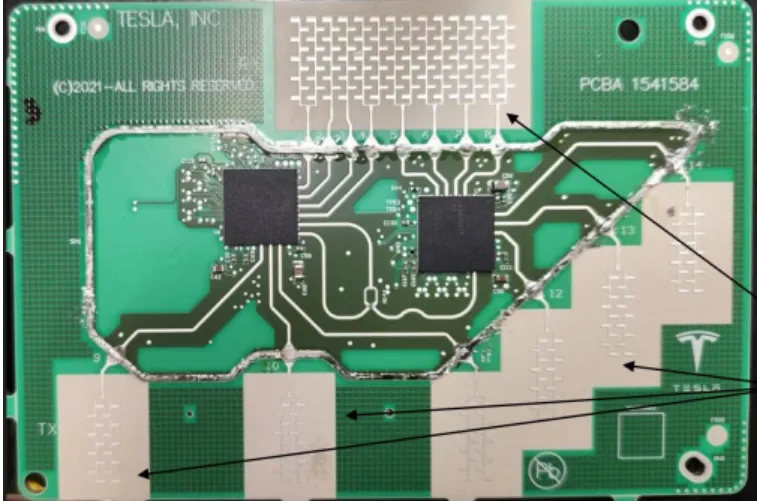
值得注意的是,该雷达的信号处理芯片为Xilinx 7020系列,茂泽的报价为每片1275元,这大大增加了整套毫米波雷达的成本。笔者对此颇感意外,毕竟TI的方案是内嵌DSP的。而据茂泽介绍,7020内嵌了ARM和FPGA,可以作为传感融合芯片使用,FPGA的实时性是一大优势。据官网介绍,7020可用于环境意识和整合 所以这款雷达后处理潜力很大。 到目前为止,似乎只有 Model S 和 Model X 车辆配备了新的雷达装置:

通信模块
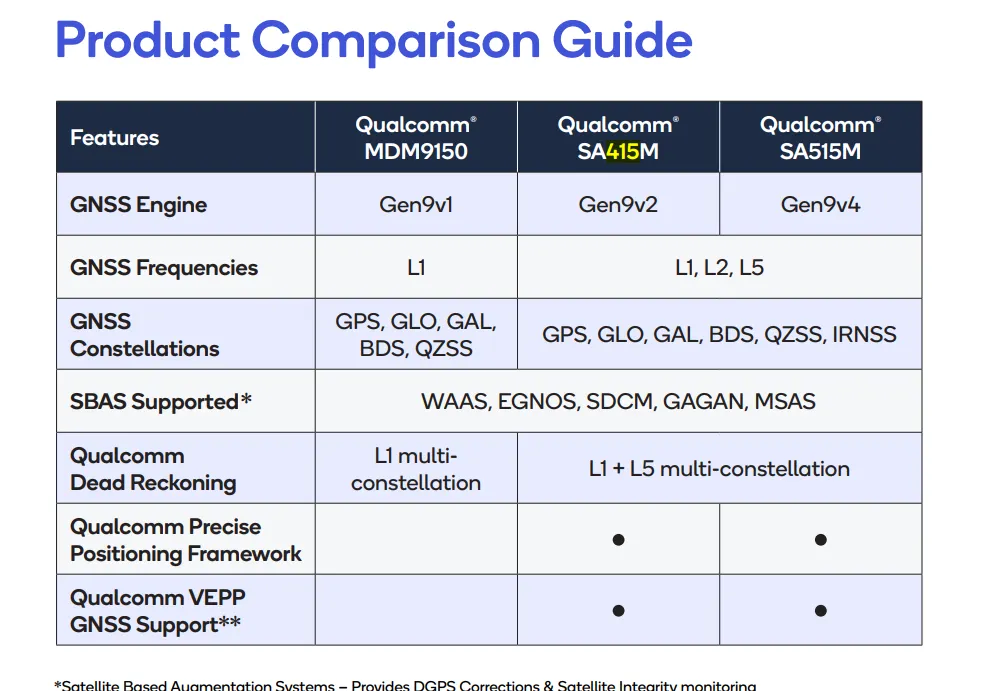
通讯模块依然是SA415,由于高通SDX55价格过高,特斯拉目前还不愿意把通讯模块升级到5G。SA415还搭载了另一套GNSS定位系统(VEPP)。
自驾摄像头
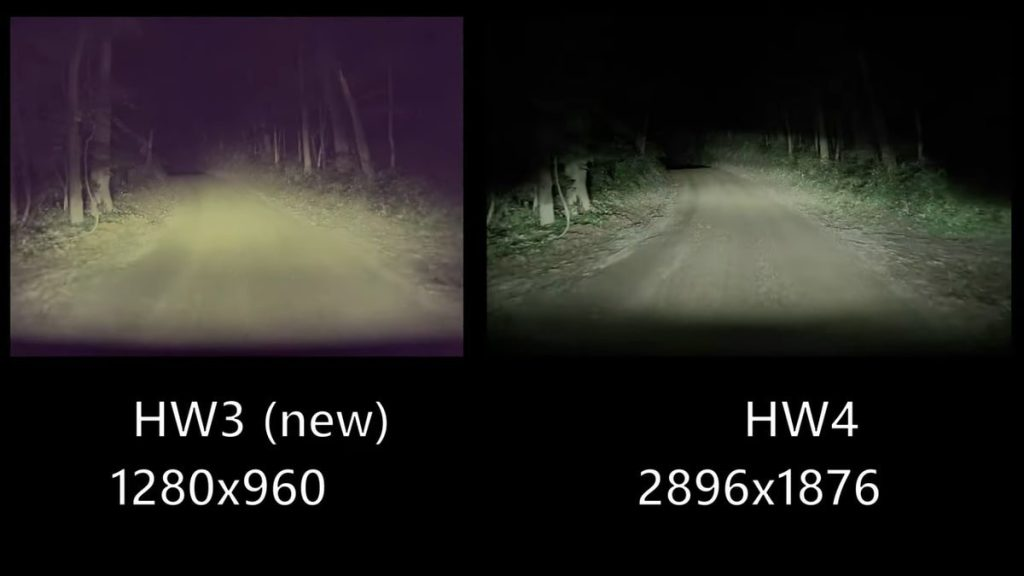
HW4.0 Camera的信息目前还比较少,维基百科的信息是自驾相关的Camera 均为5MP,但是没有显示引用信息来源;另外还有一种说法除Front Camera为5MP外,其他均为1.36MP。 仅仅为猜测,需要相关信息确认:通过网上的HW4.0 VS HW3.0的Camera效果对比看,个人感觉HW4.0选择全系5MP Camera的可能性更高,CIS统一采用Sony IMX490,延续Tesla一贯的系统化最优设计风格,所有Camera统一5MP设计(增加CIS议价权,减少Camera PCBA的设计维护数量),后续搭配不同的镜头得到不同应用的Camera。Tesla走的是CIS尽量统一化路线,即使无法完全统一,也是品类最少化。 新的摄像头还将提供更好的图像质量,并将有利于哨兵模式等非FSD功能。 然而,新相机分辨率的提高只是即将发生的相机变化的一小部分。摄像头数量从接口上看增加到了12个。
具体如下,Camera(RGGB)*11,CIS统一化为5MP:
前视*2(Sony IMX490)(5.43MP);
侧前视*2(5.43MP);
侧后视*2(5.43MP);
后视*1(5.43MP);
环视*3(Rear Corner Camera*2+Front Bump Camera*1)(5.43MP)

每个插口上都标记了摄像头的连接位置,比如 F-SVC、L-SVC、R-SVC、L-FF-Rear、R-FF-Rear 等。

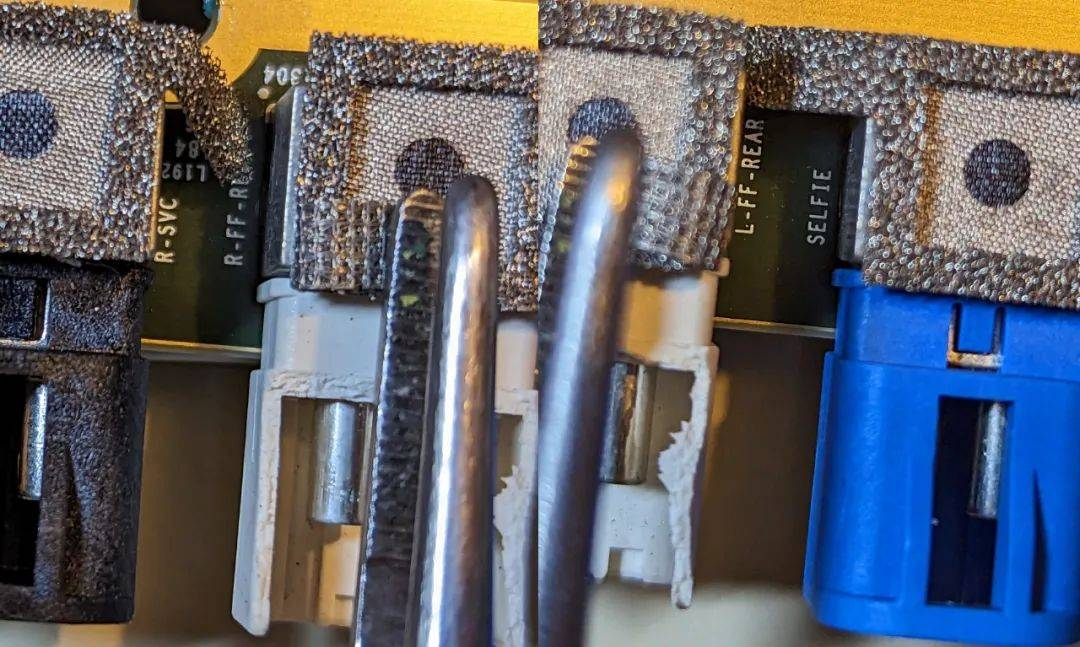
特斯拉HW4.0 搭载12 个摄像头连接器,其中一个标记为备用。目前所有特斯拉汽车共配备 9 个摄像头。其中三个是前向摄像头,位于挡风玻璃下方,两个位于挡泥板上,两个位于 B 柱上,一个位于后部,一个用于座舱摄像头。 可以确定的是,前挡风玻璃上有两个摄像头,这也在之前实车的照片中被拍到,而车厢内依然有一个摄像头。 升级后的摄像头以其独特的红色调为标志,能够提供车辆周围环境的全面视野。此外,前置挡风玻璃摄像头还配备了加热元件,以确保在各种天气条件下都能保持最佳运行。

其中有两个活动摄像头,颜色为红色,还有一个假摄像头(该插槽中已不再使用),如下所示:

新款相机的分辨率更高,细节更清晰。AI4 的后置摄像头分辨率为 1448×938,而硬件 3 的分辨率为1280×960。 前置摄像头的差异更大。HW4/AI4 的分辨率为 2896×1876,而 HW3 的分辨率为 1280×960。 此外,它们所具有的明显的红色色调确保了在低光照条件下更好的性能。 HW4/AI4 的摄像头带有红色镜头 – 最容易看到的地方是前置摄像头 – 那里有 2 个红色镜头和一个黑色(假)镜头。 AI4 取消了第三个前置摄像头,因为摄像头现在具有更高的分辨率。 侧摄像头也略有不同,具有相同的红色色调,但转向指示灯更小更窄。
L-FF-Rear 和 R-FF-Rear 两个摄像头应该是会出现在前翼子板的位置。


特斯拉 CyberTruck 上也配备了前保险杠摄像头,有传言称其他车型也可能配备该摄像头。事实上,有人在特斯拉网站上看到了新款 Highland Model 3 前保险杠摄像头的图片,但这些摄像头后来被移除了。

处理能力
HW4.0 的速度将比HW3.0快 2 到 4 倍。毫无疑问,部分性能将用于处理新的摄像头信号以及新摄像头提供的额外像素。然而,鉴于硬件 3.0 的处理能力已接近极限,额外的性能至关重要。 新硬件芯片的规格,其核心数量将从 12 个增加到 20 个,最高主频可达 2.35 GHz。此外,TRIP 核心数量也从 2 个增加到 3 个,最高主频可达 2.2 GHz。 马斯克之前曾表示,HW4 比硬件 3 快 3-5 倍,尽管目前尚未充分利用所有计算能力。 目前尚不清楚硬件 4.0 相比硬件 3 的速度会快多少,但听起来改进可能接近我们预期的 2-4 倍速度提升的下限。 提供的硬件规格是每个节点的,主板有两个节点,预计用于冗余。
特斯拉推出HW3.0 时,也考虑到了紧急情况下的冗余。每个电路板都包含两个相同的节点。两个节点可以计算相同的数据并比较输出,从而让车辆知道是否存在问题。即使一个节点发生故障,车辆也能继续自动驾驶足够长的时间,以便安全靠边停车。 然而,随着特斯拉处理需求的增加,HW3.0 上的冗余被消除,以便特斯拉可以利用两个节点的处理能力。 通过HW4.0,特斯拉再次在其硬件中增加了冗余,不仅在芯片和处理方面,而且在电源冗余方面。 电源
随着性能水涨船高的,是功耗,绿神表示 HW4.0 的功耗大约是 HW3.0 的 两倍,甚至加入了更强的电源支持。
Ref:https://www.autopilotreview.com/tesla-hardware-4-rolling-out-to-new-vehicles/ (有表格)
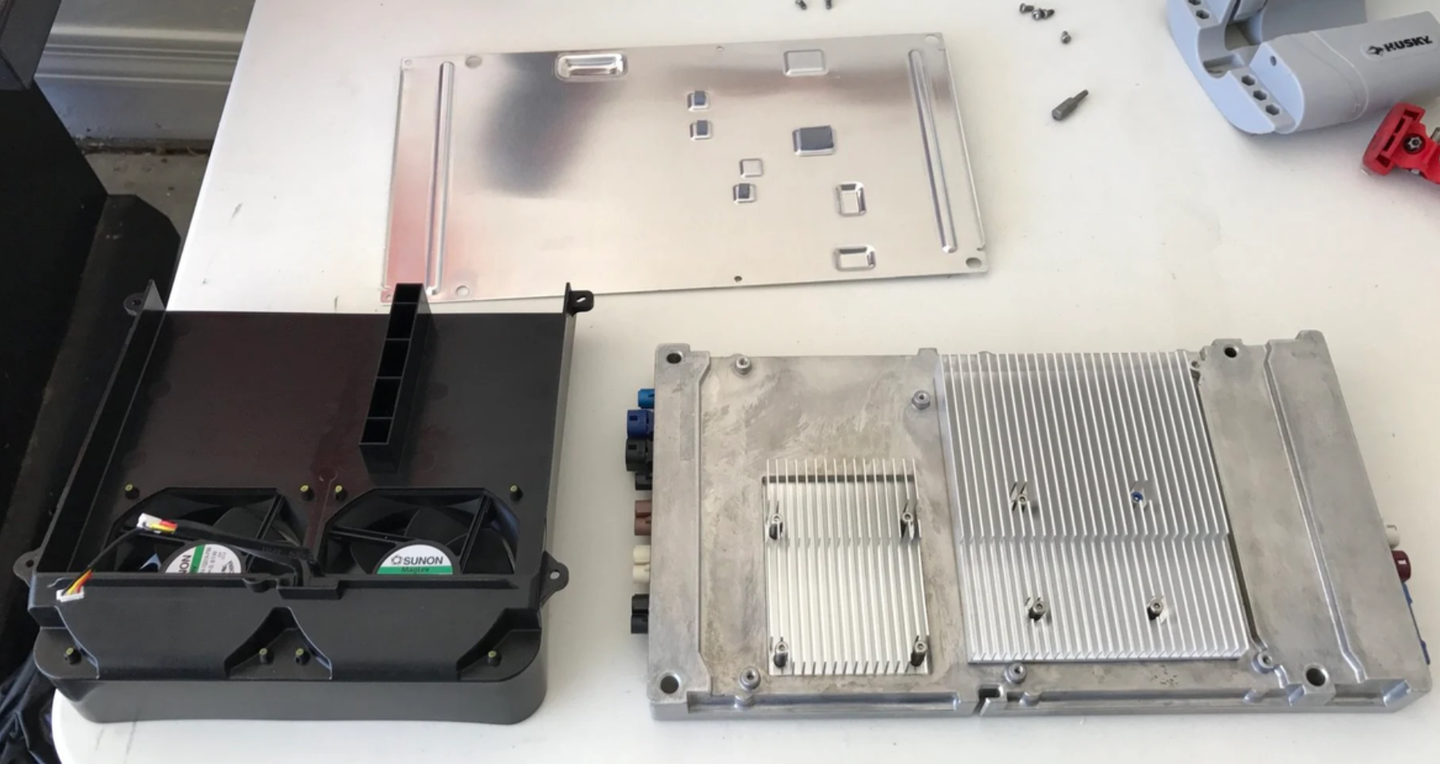
当前硬件 4 实现
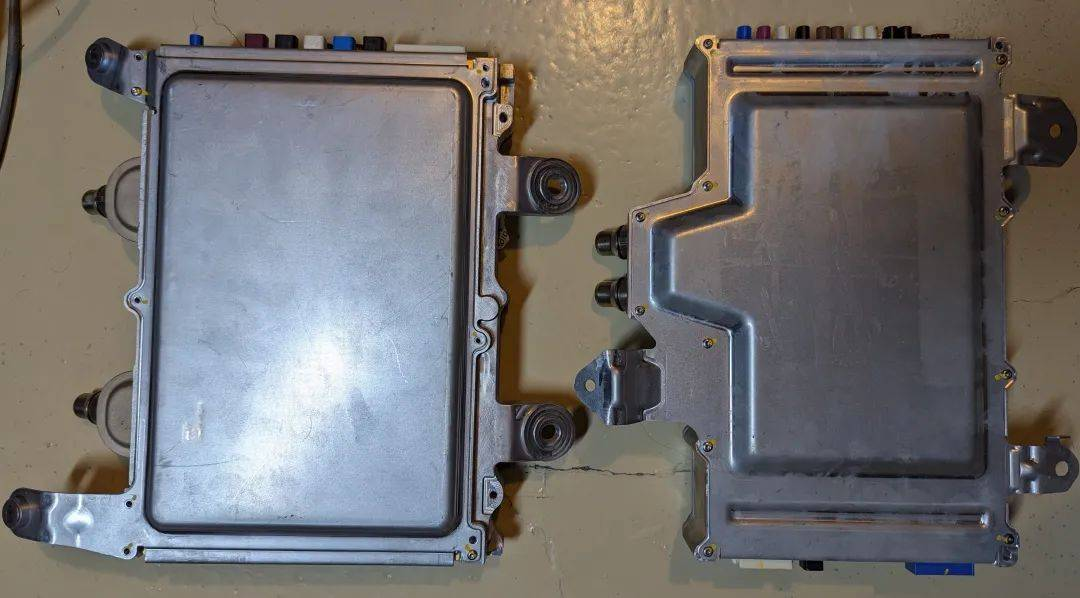
在对 Model Y Hardware 4 单元进行拆解时, Model S 和 X 上的 Hardware 4 相比存在以下差异:
HW4 的物理结构与 S/X 型号相似,这打破了有关 HW3 汽车可能进行改装的任何猜测。
HW4 的电路板布局与 Model S 上的 HW4 类似,但某些组件(包括 GPU 和高级音频硬件)现在缺失或减少了。这似乎是特斯拉为了降低成本而采取的措施。
HW4 在信息娱乐系统方面使用了更便宜的非纠错码 RAM (ECC RAM)。它还增加了两个显示接口,但数量较少,这暗示车辆可能配备第二个显示屏。
HW4 的其他显著特征包括重新定位的 BroadR-Reach 以太网,以及新增的第三个非密集型以太网。网关芯片也进行了更改,目前使用的是来自其他供应商的不同型号。
将 HW3 汽车改装为 HW4 汽车并非像看起来那么简单,因为需要进行修改以适应新的冷却液管道位置。这可能会使改装成本比简单地制造一块旧款尺寸的新电路板更高。
德克萨斯州生产的 Model Y 配备了塑料“防火墙”,因此需要更改新款 HW4 的安装方式。尽管内部组件保持不变,但不同的安装方式导致电脑需要使用唯一的零件编号。
Model Y 的摄像头连接器数量有所减少,这也导致了 HW4 的诸多差异。缺失的摄像头连接器原本用于连接其他摄像头,例如前保险杠摄像头。然而,缺少连接器并不意味着特斯拉未来不会添加它们。
Ref:https://www.hstong.com/news/detail/22012608180858664
Ref:https://www.notateslaapp.com/news/2655/teslas-fsd-v13-pushes-hw4-hardware-capabilities-end-of-line-for-hw3
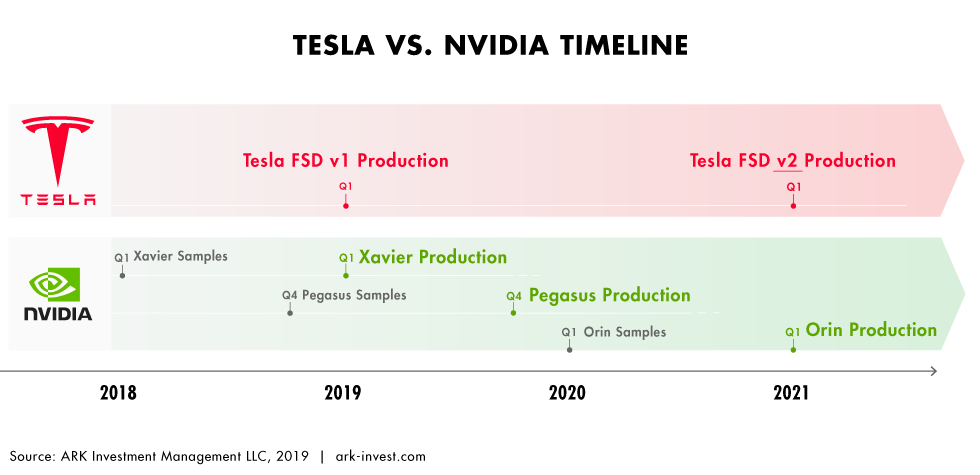
Ref:https://www.ark-invest.com/articles/analyst-research/tesla-fsd
Ref:https://semianalysis.com/2023/06/27/tesla-ai-capacity-expansion-h100/
)


)












)

)
:锁问题排查全攻略——揪出“阻塞元凶”)