项目概述
在物联网与机器人技术融合发展的今天,基于ESP32的创意项目层出不穷。今天为大家介绍一款极具创新性的ESP32-Cam三脚架机器人(Dodge),它将传统三脚架结构与智能监控功能完美结合,通过巧妙的机械设计和开源硬件实现了灵活的移动监控能力。
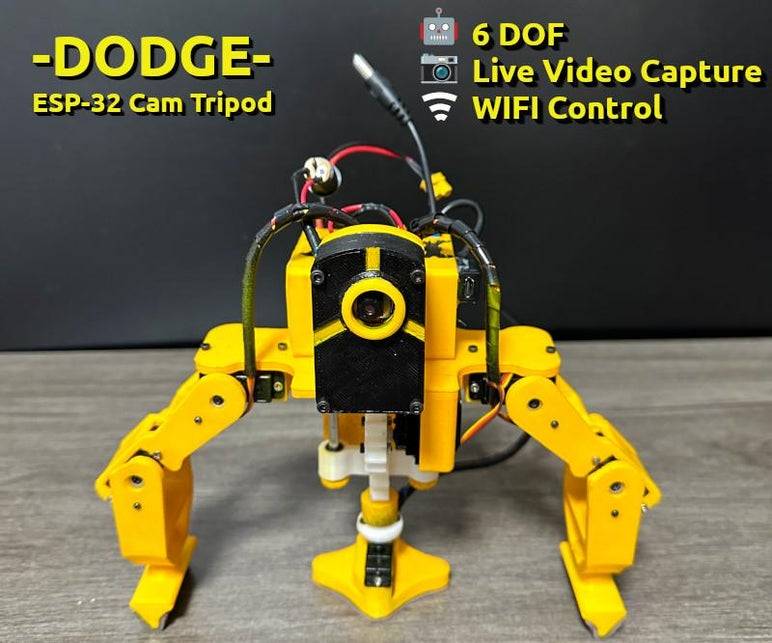
这款机器人最引人注目的是其独特的中间支撑腿设计,配合6个数字舵机构成的关节系统,不仅实现了稳定的三足鼎立结构,还能完成360度旋转、侧向移动和高度调节等复杂动作。通过WiFi连接,用户可在手机或电脑端实时查看摄像头画面并远程控制机器人运动,堪称"会走路的监控摄像头"。
核心技术特点
1. 机械结构创新
- 三足鼎立设计:中间支撑腿+两侧驱动腿的布局,兼顾稳定性与灵活性
- 全舵机驱动:6个Emax ES08MDII数字舵机分别控制髋关节、膝关节和踝关节
- 模块化组件:3D打印外壳+金属结构件,兼顾轻量化与结构强度
2. 电子系统配置
- 主控单元:ESP32-Cam模块,集成WiFi、蓝牙和摄像头功能
- 双电源方案:5V主电池给ESP32供电,7.4V副电池经降压模块给舵机供电
- 稳定电路设计:配备1000uF和470uF电解电容,有效防止电压波动
3. 软件功能亮点
- 远程监控:实时视频传输,支持多设备访问
- 动作控制:自定义路径规划与姿态调整
- 低功耗模式:闲置时自动进入休眠状态,延长续航
硬件选型指南
项目的成功实现离不开合理的硬件选型,以下是核心组件清单:
| 关键组件 | 规格参数 | 用途说明 |
|---|---|---|
| ESP32-Cam模块 | 带Type-C下载板 | 主控与图像采集核心 |
| Emax ES08MDII舵机 | 180°旋转,0.1s/60° | 6个关节的精确控制 |
| 锂电池 | 7.4V/800mAh + 5V/800mAh | 双电源独立供电系统 |
| 3A可调降压模块 | 输入4-38V,输出1.25-36V | 为舵机提供稳定电压 |
| LM4UU直线轴承 | 4mm内径 | 确保滑动结构顺畅运行 |
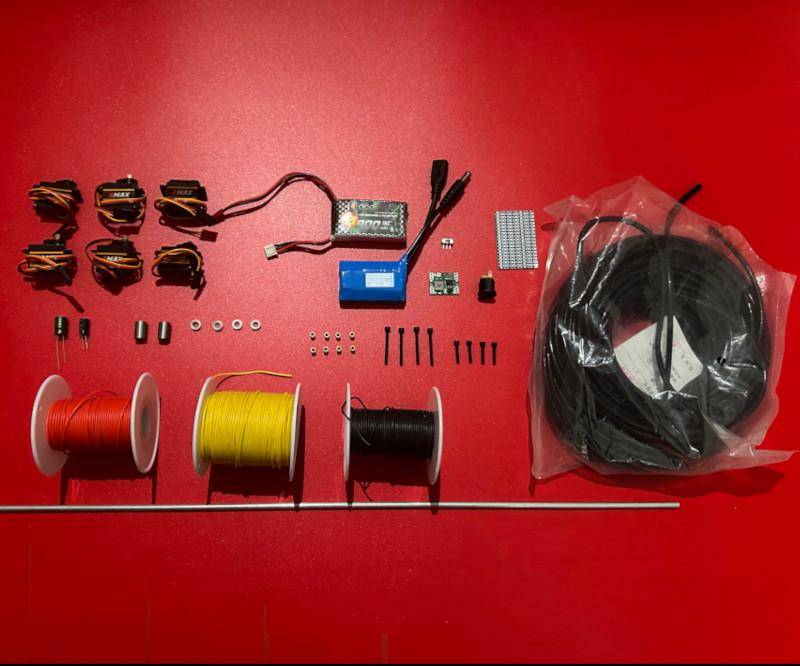
除表中核心组件外,还需要铝棒、轴承、螺丝等机械零件,以及万能板、电线、开关等电子元件。特别提醒:3D打印机是制作外壳和结构件的必备工具,若没有打印条件可考虑激光切割或CNC加工替代方案。
应用场景探索
这款机器人的多功能特性使其在多个领域具有应用潜力:
- 家庭安防:自主移动监控,无死角覆盖
- 实验室巡检:替代人工进行环境监测
- 智能园艺:远程观察植物生长状态
- 教育平台:机器人学与物联网教学案例
- 创意展示:艺术装置与互动展品
制作入门指引
对于希望动手尝试的开发者,建议按以下步骤推进:
-
资料准备:访问项目详情页获取完整设计文件与代码
🔗 ESP32-Cam三脚架机器人项目 -
物料采购:按材料清单备齐组件,重点关注舵机和结构件质量
-
分步实现:
- 3D打印结构件并进行机械组装
- 焊接电路并进行供电测试
- 烧录固件并调试通信功能
- 校准舵机参数与运动控制
-
功能扩展:可尝试添加避障传感器、语音控制或AI图像识别功能
结语
ESP32-Cam三脚架机器人项目完美诠释了"创意+技术"的融合魅力,通过开源硬件与3D打印技术,让普通开发者也能打造出专业级的机器人作品。无论是电子爱好者、创客还是教育工作者,都能从这个项目中获得启发与实践经验。
如果你对这个项目感兴趣,不妨访问项目主页获取完整教程,开启你的机器人制作之旅。对于有经验的开发者,也欢迎参与项目优化,共同推动开源硬件生态的发展!想探索更多类似的创意项目和实战课程?访问IT项目网获取丰富的技术资源与学习素材。


用法示例(C++和Python))





C++入门教程:前言——你的随身教程和学习笔记)
重定向 | 时间相关指令 | 文件查找 | 打包与压缩)
)



)




:自動詞 & 他動詞)