为什么外设配置对机器人研究如此重要?
在当今机器人技术飞速发展的时代,高校学生研究团队正成为创新的重要力量。无论是参加机器人竞赛、开展毕业设计,还是进行学术研究,正确配置和使用外设设备都是成功的关键。尤其学生组装一个服务机器人,它需要在家中自由行走,避开家具和宠物,还能识别你的手势指令。这个看似神奇的能力,其实来自于一系列神奇的外设传感器:激光雷达、IMU和深度相机。就像人类需要眼睛、耳朵和小脑来保持平衡和感知环境一样,机器人也需要这些"感官"来理解周围世界。
作为一名高校学生,你可能正在参与机器人或自动驾驶相关的研究项目。本文将带你深入了解这些关键外设的工作原理、配置方法和应用场景,让你能够为自己的项目选择合适的传感器并快速上手使用。
一、 激光雷达:机器人的"智慧之眼"
1、什么是激光雷达?
激光雷达(LiDAR,Light Detection and Ranging)是一种通过激光束来探测和测距的先进技术。它就像是机器人的"眼睛",能够帮助机器人"看见"周围环境并测量距离。
LDS-50C-C30E激光雷达,采用TOF(Time of Fight)飞行时间测距技术,根据激光飞行时间来测量距离。在40m的有效探测距离内测距精度可达到±25mm,测距精度不会随距离变化而变化。同时具备自主研发的360度扫描,运行可靠。
关键技术解析:TOF(Time of Flight)飞行时间测距技术
TOF是激光雷达的核心技术原理,它的工作方式非常有趣:设备发射一束激光,当激光遇到物体后会反射回来,设备通过计算激光从发射到返回的时间差,再乘以光速,就能精确计算出距离。这些特性使得它非常适合用于机器人导航、环境建模、避障等应用场景。
硬件连接与配置
物理连接:使用网线将激光雷达的以太网口与Jetson Nano开发板相连。
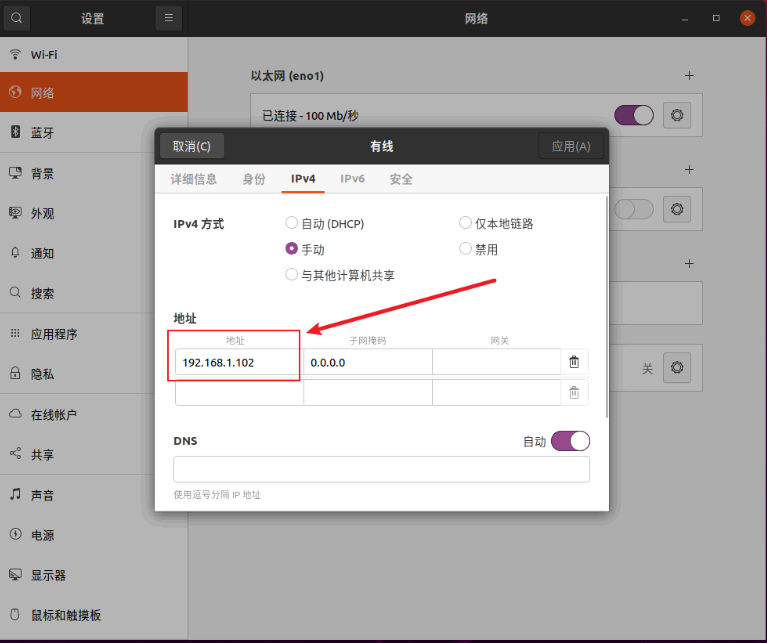
网络配置:为了让Jetson Nano能够与雷达通信,需要将两者设置在同一个局域网内。通过以下命令为Jetson Nano的网卡配置IP地址:
bash
sudo ip addr add 192.168.158.200/24 dev eth0
这里的eth0是网卡名称,根据实际设备可能会有所不同。该命令为网卡分配了一个静态IP地址192.168.158.200,并设置子网掩码为24位(即255.255.255.0)。
# 给网络接口添加IP地址sudo ip addr add 192.168.158.200/24 dev <网卡名称>sudo ip addr add 192.168.158.200/24 dev eth0
2、 查看雷达点云
点云是什么?点云是激光雷达扫描后生成的一组数据点,这些点在三维空间中表示被探测物体的表面形状。就像用无数个小点描绘出周围环境的"轮廓图"。
#启动雷达驱动roslaunch bluesea2 udp_lidar.launch#打开rviz查看点云数据rviz -d /home/plan/AutoTrack-IR-DR200/src/drivers/bluesea2/rviz/demo.rviz
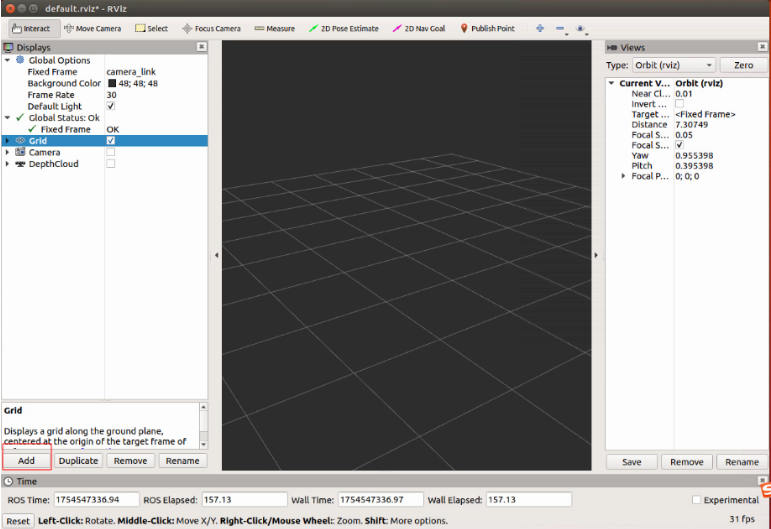
成功配置后,你将在屏幕上看到类似下图的点云效果,它直观地展示了雷达扫描到的环境信息:
二、 机器人IMU:感知姿态与运动的"内耳"
1 、IMU是什么?为什么机器人需要它?
IMU(Inertial Measurement Unit,惯性测量单元)是测量物体三轴姿态角和加速度的装置。它就像是机器人的"内耳",帮助机器人感知自身的运动状态和方位。
人类的内耳帮助我们保持平衡,知道自己是站着、坐着还是倒立。同样,IMU让机器人知道自己的姿态、加速度和旋转速度。
3、 下载和编译驱动
步骤1:下载源码
# 进入工作空间cd ~/catkin_ws# 克隆仓库到src目录git clone --recursive https://github.com/ElettraSciComp/witmotion_IMU_ros.git src/witmotion_ros
步骤2:编译驱动
# 编译特定包catkin_make --pkg witmotion_ros# 重新加载环境
4、 运行和测试IMU数据
步骤1:启动IMU驱动
# 确保环境变量已加载source ~/catkin_ws/devel/setup.bash
# 启动IMU驱动
roslaunch witmotion_ros witmotion.launch
# 查看IMU数据(新开终端)
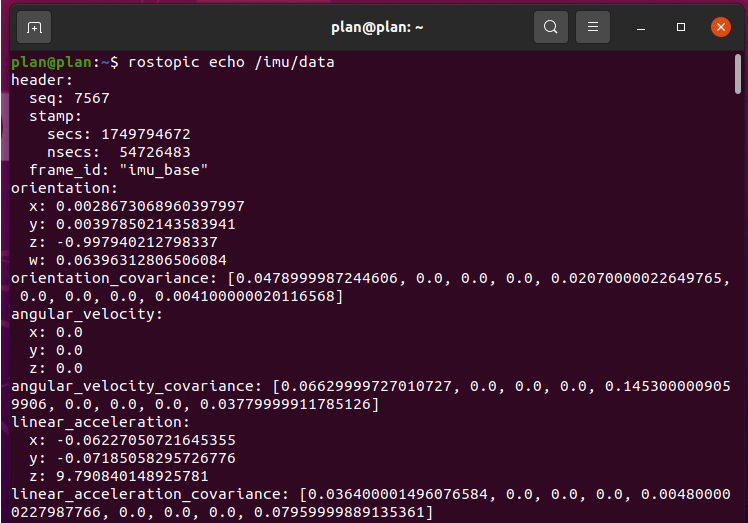
rostopic echo /imu/data
成功运行后,你将看到实时输出的IMU数据,包括方向、加速度和角速度等信息:
三、深度相机:三维感知的"立体视觉"
1、 深度相机原理介绍
深度相机是一种能够获取场景中每个点距离信息的相机,它不仅能够捕获普通的彩色图像(RGB图像),还能同时获取每个像素点的距离信息,形成"深度图"。
双目深度相机采用双目结构光技术,它模拟了人类双眼的立体视觉原理:通过两个摄像头(像人的两只眼睛)从不同角度拍摄图像信息同一场景,并通过比较两幅图像的差异,计算每个点的距离信息,结构光投射特定图案到场景中,进一步提高了计算精度
2、安装驱动依赖
深度相机需要较多的软件依赖库支持:
sudo apt install libgflags-dev ros-melodic-image-geometry ros-melodic-camera-info-manager \ ros-melodic-image-transport-plugins ros-melodic-compressed-image-transport \ ros-melodic-image-transport ros-melodic-image-publisher libgoogle-glog-dev libusb-1.0-0-dev libeigen3-dev \ ros-melodic-diagnostic-updater ros-melodic-diagnostic-msgs \ libdw-dev
安装 udev 规则
cd ~/catkin_wssource ./devel/setup.bashroscd orbbec_camerasudo bash ./scripts/install_udev_rules.sh
启动相机
启动相机并显示RGB图像与深度图像
终端一:
source ./devel/setup.bashroslaunch orbbec_camera dabai_dcw.launch
终端二:
source ./devel/setup.bashrviz
在Rviz中,可以通过添加By topic选项,选择/camera/color/image_raw话题来查看实时RGB图像,选择/camera/depth/image_raw话题来查看深度图像。深度图像通常以灰度图形式显示,颜色越亮表示距离越近,越暗表示距离越远。
在实际机器人项目中,我们通常需要同时使用多种传感器:激光雷达提供远距离环境地图、IMU提供机器人自身姿态信息、深度相机提供近距离精细物体识别,最后通过ROS框架,我们可以将这些设备的数据融合在一起,构建更加完整的环境感知系统。


总结(89))
-图像修复与编辑)


)









![[react] react-router-dom是啥?](http://pic.xiahunao.cn/[react] react-router-dom是啥?)


