电路特征介绍
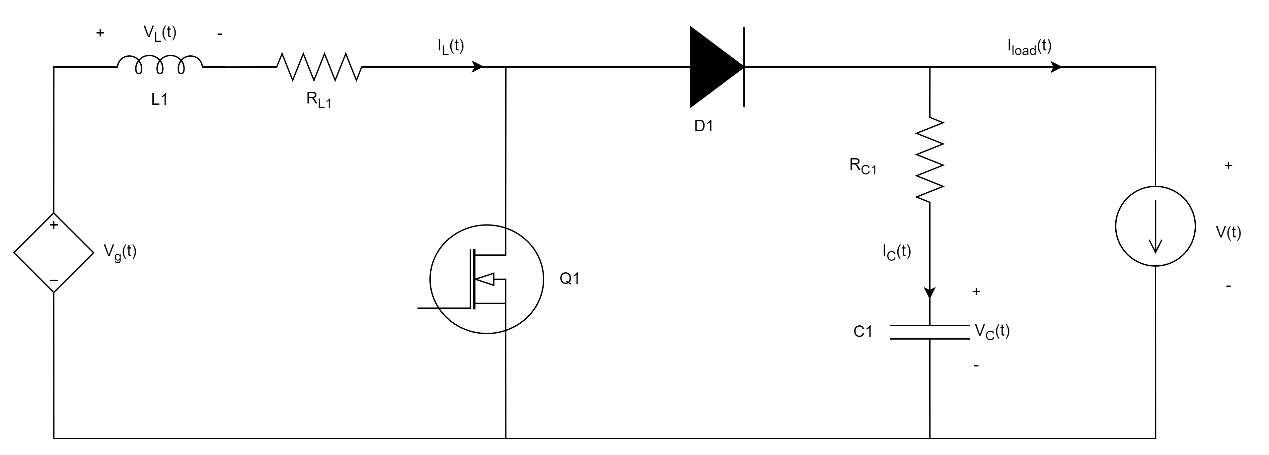
如图所示是一个非理想情况下的boost电路,其中L1L_{1}L1和RL1R_{L1}RL1是分别是电感和串联电阻;C1C_{1}C1和RC1R_{C1}RC1是输出电容和串联电阻;Q1Q_{1}Q1是MOS管,其导通电阻是RonR_{on}Ron;D1D_{1}D1是二极管,正向导通电压是VfV_{f}Vf;Vg(t)V_{g}\left. (t \right.)Vg(t)是输入电压;VL(t)V_{L}\left. (t \right.)VL(t)和IL(t)I_{L}\left. (t \right.)IL(t)分别是电感的电压和电流;VC(t)V_{C}\left. (t \right.)VC(t)和IC(t)I_{C}\left. (t \right.)IC(t)分别是电容的电压和电流;D(t)D\left. (t \right.)D(t)表示占空比;T表示PWM开关周期;V(t)V\left. (t \right.)V(t)和Iload(t)I_{load}\left. (t \right.)Iload(t)表示输出电压和输出电流,其他的符号说明如下:
-
Vg(t)=VgV_{g}\left. (t \right.) = V_{g}Vg(t)=Vg+v^g(t){\widehat{v}}_{g}\left. (t \right.)vg(t),IL(t)=IL+i^L(t)I_{L}\left. (t \right.) = I_{L} + {\widehat{i}}_{L}\left. (t \right.)IL(t)=IL+iL(t),VC(t)=VC+v^c(t)V_{C}\left. (t \right.) = V_{C} + {\widehat{v}}_{c}\left. (t \right.)VC(t)=VC+vc(t),V(t)=V+v^(t)V\left. (t \right.) = V + \widehat{v}\left. (t \right.)V(t)=V+v(t),Iload(t)=Iload+i^load(t)I_{load}\left. (t \right.) = I_{load} + {\widehat{i}}_{load}\left. (t \right.)Iload(t)=Iload+iload(t),
D(t)=D+d^(t)D\left. (t \right.) = D + \widehat{d}\left. (t \right.)D(t)=D+d(t)。上式中前者表示直流量,后者表示扰动 -
v^g(s){\widehat{v}}_{g}\left. (s \right.)vg(s),i^L(s){\widehat{i}}_{L}\left. (s \right.)iL(s),v^c(s){\widehat{v}}_{c}\left. (s \right.)vc(s),v^(s)\widehat{v}\left. (s \right.)v(s),i^load(s){\widehat{i}}_{load}\left. (s \right.)iload(s),d^(s)\widehat{d}\left. (s \right.)d(s)分别是v^g(t){\widehat{v}}_{g}\left. (t \right.)vg(t),i^L(t){\widehat{i}}_{L}\left. (t \right.)iL(t),v^c(t){\widehat{v}}_{c}\left. (t \right.)vc(t),v^(t)\widehat{v}\left. (t \right.)v(t),i^load(t){\widehat{i}}_{load}\left. (t \right.)iload(t),d^(t)\widehat{d}\left. (t \right.)d(t)的拉普拉斯变换
基于平均状态空间方程建模
在0~D(t)T期间,MOS管导通为一个电阻RonR_{on}Ron,二极管断开。
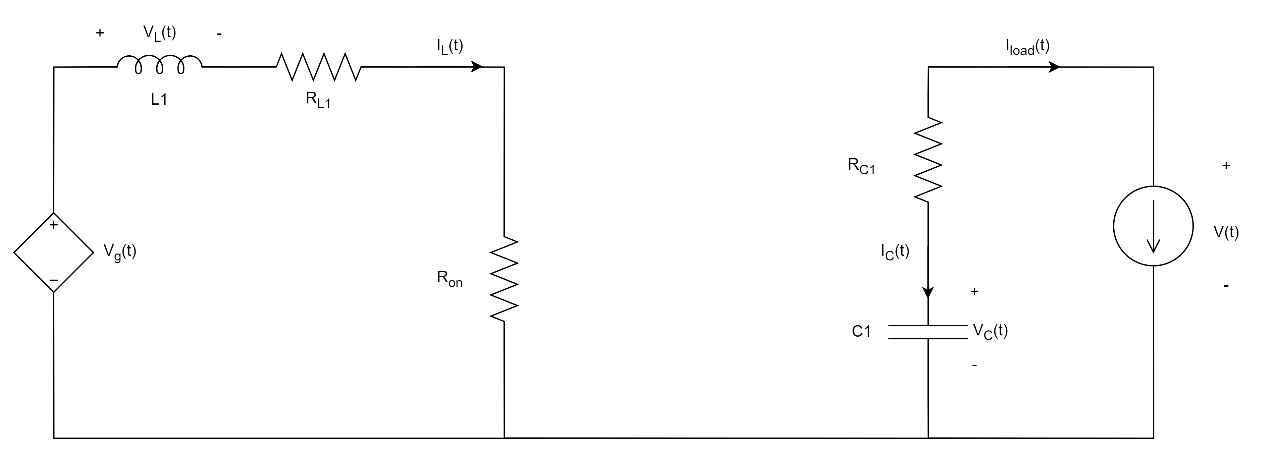
根据基尔霍夫电压(任何一个闭合回路的元件的电压降的代数和为0)和电流定律热(任意节点处各支路电流的代数和为0),电感那一路顺时针压降应为0,顺着电流方向的电阻为降压,电容、电感、电压源等如果从正端口到负端口,电压降为负,反之为正,重点关注电感两端的感应电压和电感电流的极性,如上图所示:
0=Vg(t)−VL(t)−IL(t)(RL1+Ron)=Vg(t)−L1dIL(t)dt−IL(t)(RL1+Ron)0 = V_{g}(t) - V_{L}(t) - I_{L}(t)\left( R_{L1} + R_{on} \right) = V_{g}(t) - L_{1}\frac{dI_{L}(t)}{dt} - I_{L}(t)\left( R_{L1} + R_{on} \right)0=Vg(t)−VL(t)−IL(t)(RL1+Ron)=Vg(t)−L1dtdIL(t)−IL(t)(RL1+Ron)
也可以进一步写成
dIL(t)dt=Vg(t)−IL(t)(RL1+Ron)L1\frac{dI_{L}(t)}{dt} = \frac{V_{g}(t) - I_{L}(t)\left( R_{L1} + R_{on} \right)}{L_{1}}dtdIL(t)=L1Vg(t)−IL(t)(RL1+Ron)
电容那一路的任意节点处的电流和应为0,可得
0=IC(t)+Iload(t)=C1dVC(t)dt+Iload(t)0 = I_{C}(t) + I_{load}\left. (t \right.) = C_{1}\frac{dV_{C}(t)}{dt} + I_{load}\left. (t \right.)0=IC(t)+Iload(t)=C1dtdVC(t)+Iload(t)
也可以进一步写成
dVC(t)dt=−Iload(t)C1\frac{dV_{C}(t)}{dt} = \frac{- I_{load}\left. (t \right.)}{C_{1}}dtdVC(t)=C1−Iload(t)
电容那一路顺时针压降应为0
0=VC(t)+RC1IC(t)−V(t) =VC(t)−RC1Iload(t)−V(t)0 = V_{C}(t) + R_{C1}I_{C}(t) - V(t)\ = V_{C}(t) - R_{C1}I_{load}\left. (t \right.) - V(t)0=VC(t)+RC1IC(t)−V(t) =VC(t)−RC1Iload(t)−V(t)
也可以进一步写成
V(t)=VC(t)− IloadRC1 V(t) = V_{C}(t) - \ I_{load}R_{C1}\ V(t)=VC(t)− IloadRC1
重新整理一下电感,电容和输出:
dIL(t)dt=Vg(t)−IL(t)(RL1+Ron)L1dVC(t)dt=−Iload(t)C1{\frac{dI_{L}(t)}{dt} = \frac{V_{g}(t) - I_{L}(t)\left( R_{L1} + R_{on} \right)}{L_{1}}
}{\frac{dV_{C}(t)}{dt} = \frac{- I_{load}\left. (t \right.)}{C_{1}}}dtdIL(t)=L1Vg(t)−IL(t)(RL1+Ron)dtdVC(t)=C1−Iload(t)
V(t)=VC(t)−IloadRC1{V(t) = V_{C}(t) - I_{load}R_{C1}}V(t)=VC(t)−IloadRC1
然后建立状态空间方程如下:
ddt[IL(t)VC(t)]=[−(RL1+Ron)L1000][IL(t)VC(t)]+[1L1000−1C10][Vg(t)Iload(t)Vf]{\frac{d}{dt}\begin{bmatrix}
I_{L}(t )\\
V_{C}(t )
\end{bmatrix} = \begin{bmatrix}-\frac{\left( R_{L1} + R_{on} \right)}{L_{1}} & 0 \\
0 & 0
\end{bmatrix}\begin{bmatrix}
I_{L}(t )\\
V_{C}(t)
\end{bmatrix} + \begin{bmatrix}
\frac{1}{L_{1}} & 0 & 0 \\
0 & \frac{- 1}{C_{1}} & 0
\end{bmatrix}\begin{bmatrix}
V_{g}\left. (t \right.) \\
I_{load}\left. (t \right.) \\
V_{f}
\end{bmatrix}}dtd[IL(t)VC(t)]=[−L1(RL1+Ron)000][IL(t)VC(t)]+[L1100C1−100]Vg(t)Iload(t)Vf
V(t)=[01][IL(t)VC(t)]+[0−RC10][Vg(t)Iload(t)Vf] V(t) = \begin{bmatrix}
0 & 1
\end{bmatrix}\begin{bmatrix}
I_{L}(t) \\
V_{C}(t )
\end{bmatrix} + \begin{bmatrix}
0 & - R_{C1} & 0
\end{bmatrix}\begin{bmatrix}
V_{g}(t) \\
I_{load}(t)\\
V_{f}
\end{bmatrix}V(t)=[01][IL(t)VC(t)]+[0−RC10]Vg(t)Iload(t)Vf
为了方便显示,将其改为下面的形式
x(t)=[IL(t)VC(t)]x(t)=\begin{bmatrix}
I_{L}(t ) \\
V_{C}(t)
\end{bmatrix} x(t)=[IL(t)VC(t)]
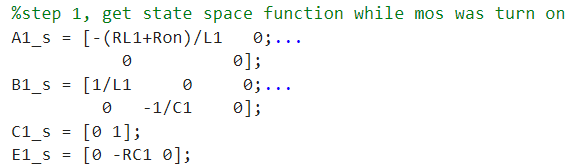
A1=[−(RL1+Ron)L1000]A_1 = \begin{bmatrix}-\frac{\left( R_{L1} + R_{on} \right)}{L_{1}} & 0 \\
0 & 0
\end{bmatrix}A1=[−L1(RL1+Ron)000]
B1=[1L1000−1C10] B_1 = \begin{bmatrix} \frac{1}{L_{1}} & 0 & 0 \\ 0 & \frac{- 1}{C_{1}} & 0 \end{bmatrix}B1=[L1100C1−100]
u(t)=[Vg(t)Iload(t)Vf]u(t)=\begin{bmatrix} V_{g}\left. (t \right.) \\ I_{load}\left. (t \right.) \\ V_{f} \end{bmatrix}u(t)=Vg(t)Iload(t)Vf
y(t)=V(t) y(t) = V(t) y(t)=V(t)
C1=[01] C_1 = \begin{bmatrix}
0 & 1
\end{bmatrix}C1=[01]
E1=[0−RC10] E_1 = \begin{bmatrix}
0 & - R_{C1} & 0
\end{bmatrix}E1=[0−RC10]
也可以表示如下:
dx(t)dt=A1x(t)+B1u(t){\frac{d\mathbf{x}(t)}{dt} = A_{1}\mathbf{x}(t) + B_{1}\mathbf{u}(t)
}dtdx(t)=A1x(t)+B1u(t)
y(t)=C1x(t)+E1u(t){\mathbf{y(t) =}\mathbf{C}_{\mathbf{1}}\mathbf{x(t) +}\mathbf{E}_{\mathbf{1}}\mathbf{u(t)}}y(t)=C1x(t)+E1u(t)
对应的MATLAB脚本如下
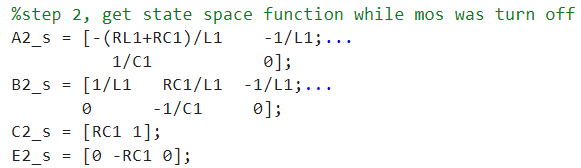
在D(t)T~T期间,MOS管断开,二极管导通为一个电压源VfV_{f}Vf
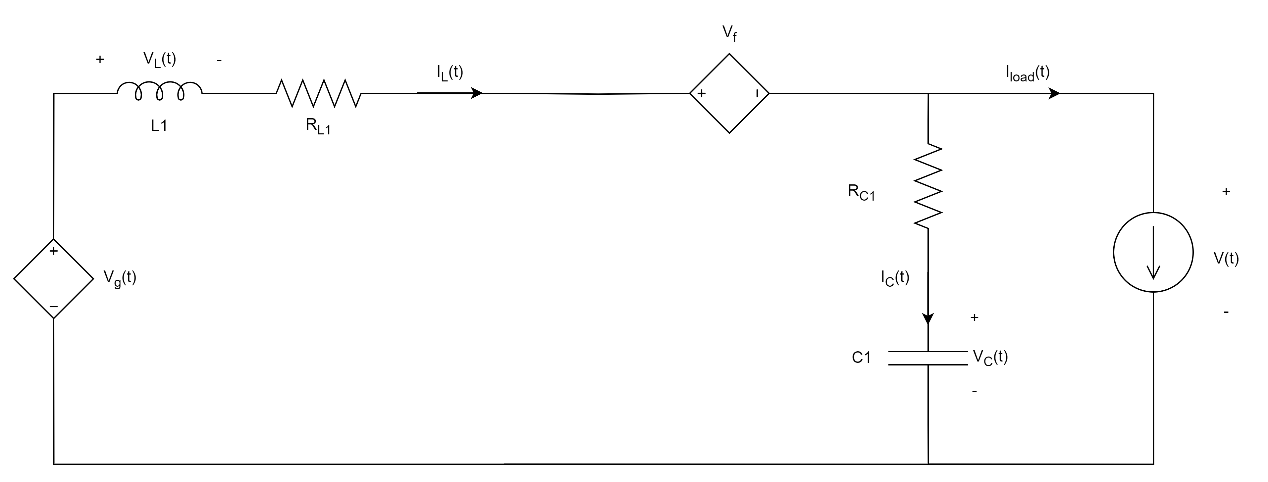
电容电流,电感电流以及输出电流应当满足
IL(t)=IC(t)+Iload(t)=C1dVC(t)dt+Iload(t)I_{L}(t) = I_{C}\left. (t \right.) + I_{load}\left. (t \right.) = C_{1}\frac{dV_{C}(t)}{dt} + I_{load}\left. (t \right.)IL(t)=IC(t)+Iload(t)=C1dtdVC(t)+Iload(t)
也可以进一步写成:
IC(t)=IL(t)−Iload(t)dVC(t)dt=IL(t)−Iload(t)C1{I_{C}\left. (t \right.) = I_{L}(t) - I_{load}\left. (t \right.)
}{\frac{dV_{C}(t)}{dt} = \frac{I_{L}(t) - I_{load}\left. (t \right.)}{C_{1}}}IC(t)=IL(t)−Iload(t)dtdVC(t)=C1IL(t)−Iload(t)
电感到电容这个环顺时针压降应为0,可得
0=Vg(t)−VL(t)−IL(t)RL1−Vf−IC(t)RC1−VC(t)=Vg(t)−L1dIL(t)dt−IL(t)RL1−Vf−(IL(t)−Iload(t))RC1−VC(t){0 = V_{g}(t) - V_{L}(t) - I_{L}(t)R_{L1} - V_{f} - I_{C}\left. (t \right.)R_{C1} - V_{C}\left. (t \right.)
}{= V_{g}(t) - L_{1}\frac{dI_{L}(t)}{dt} - I_{L}(t)R_{L1} - V_{f} - \left( I_{L}(t) - I_{load}\left. (t \right.) \right)R_{C1} - V_{C}\left. (t \right.)}0=Vg(t)−VL(t)−IL(t)RL1−Vf−IC(t)RC1−VC(t)=Vg(t)−L1dtdIL(t)−IL(t)RL1−Vf−(IL(t)−Iload(t))RC1−VC(t)
也可以进一步写成:
dIL(t)dt=Vg(t)−IL(t)RL1−Vf−(IL(t)−Iload(t))RC1−VC(t)L1\frac{dI_{L}(t)}{dt} = \frac{V_{g}(t) - I_{L}(t)R_{L1} - V_{f} - \left( I_{L}(t) - I_{load}\left. (t \right.) \right)R_{C1} - V_{C}\left. (t \right.)}{L_{1}}dtdIL(t)=L1Vg(t)−IL(t)RL1−Vf−(IL(t)−Iload(t))RC1−VC(t)
电容和输出那一路顺时针压降应为0
0=VC(t)+IC(t)RC1−V(t)=VC(t)+(IL(t)−Iload(t))RC1−V(t){0 = V_{C}(t) + I_{C}\left. (t \right.)R_{C1} - V(t) }{= V_{C}(t) + \left( I_{L}(t) - I_{load}\left. (t \right.) \right)R_{C1} - V(t)}0=VC(t)+IC(t)RC1−V(t)=VC(t)+(IL(t)−Iload(t))RC1−V(t)
也可以进一步写成:
V(t)=VC(t)+ (IL(t)−Iload(t))RC1 V(t) = V_{C}(t) + \ \left( I_{L}(t) - I_{load}\left. (t \right.) \right)R_{C1}\ V(t)=VC(t)+ (IL(t)−Iload(t))RC1
重新整理一下电感,电容和输出:
dIL(t)dt=Vg(t)−IL(t)(RL1+RC1)−Vf+Iload(t)RC1−VC(t)L1dVC(t)dt=IL(t)−Iload(t)C1V(t)=VC(t)+(IL(t)−Iload(t))RC1{\frac{dI_{L}(t)}{dt} = \frac{V_{g}(t) - I_{L}(t)\left( R_{L1} + R_{C1} \right) - V_{f} + I_{load}\left. (t \right.)R_{C1} - V_{C}\left. (t \right.)}{L_{1}}
}{\frac{dV_{C}(t)}{dt} = \frac{I_{L}(t) - I_{load}\left. (t \right.)}{C_{1}}
}{V(t) = V_{C}(t) + \left( I_{L}(t) - I_{load}\left. (t \right.) \right)R_{C1}}dtdIL(t)=L1Vg(t)−IL(t)(RL1+RC1)−Vf+Iload(t)RC1−VC(t)dtdVC(t)=C1IL(t)−Iload(t)V(t)=VC(t)+(IL(t)−Iload(t))RC1
然后建立状态空间方程如下:
ddt[IL(t)VC(t)]=[−(RL1+RC1)L1−1L11C10][IL(t)VC(t)]+[1L1RC1L1−1L10−1C10][Vg(t)Iload(t)Vf]\frac{d}{dt}\begin{bmatrix}
I_{L}\left. (t \right.) \\
V_{C}\left. (t \right.)
\end{bmatrix} = \begin{bmatrix}-\frac{\left( R_{L1} + R_{C1} \right)}{L_{1}} & \frac{- 1}{L_{1}} \\
\frac{1}{C_{1}} & 0
\end{bmatrix}\begin{bmatrix}
I_{L}\left. (t \right.) \\
V_{C}\left. (t \right.)
\end{bmatrix} + \begin{bmatrix}
\frac{1}{L_{1}} & \frac{R_{C1}}{L_{1}} & \frac{- 1}{L_{1}} \\
0 & \frac{- 1}{C_{1}} & 0
\end{bmatrix}\begin{bmatrix}
V_{g}\left. (t \right.) \\
I_{load}\left. (t \right.) \\
V_{f}
\end{bmatrix} dtd[IL(t)VC(t)]=[−L1(RL1+RC1)C11L1−10][IL(t)VC(t)]+[L110L1RC1C1−1L1−10]Vg(t)Iload(t)Vf
V(t)=[RC11][IL(t)VC(t)]+[0−RC10][Vg(t)Iload(t)Vf] V(t) = \begin{bmatrix}
R_{C1} & 1
\end{bmatrix}\begin{bmatrix}
I_{L}\left. (t \right.) \\
V_{C}\left. (t \right.)
\end{bmatrix} + \begin{bmatrix}
0 & - R_{C1} & 0
\end{bmatrix}\begin{bmatrix}
V_{g}\left. (t \right.) \\
I_{load}\left. (t \right.) \\
V_{f}
\end{bmatrix}V(t)=[RC11][IL(t)VC(t)]+[0−RC10]Vg(t)Iload(t)Vf
为了方便显示,将其改为下面的形式
x(t)=[IL(t)VC(t)]x(t)=
\begin{bmatrix}
I_{L}(t ) \\
V_{C}(t)
\end{bmatrix} x(t)=[IL(t)VC(t)]
A2=[−(RL1+RC1)L1−1L11C10] {A}_{2}= \begin{bmatrix}-\frac{\left( R_{L1} + R_{C1} \right)}{L_{1}} & \frac{- 1}{L_{1}} \\ \frac{1}{C_{1}} & 0 \end{bmatrix} A2=[−L1(RL1+RC1)C11L1−10]
B2=[1L1RC1L1−1L10−1C10] B_2 = \begin{bmatrix} \frac{1}{L_{1}} & \frac{R_{C1}}{L_{1}} & \frac{- 1}{L_{1}} \\ 0 & \frac{- 1}{C_{1}} & 0 \end{bmatrix}B2=[L110L1RC1C1−1L1−10]
u(t)=[Vg(t)Iload(t)Vf] u(t) = \begin{bmatrix} V_{g}\left. (t \right.) \\ I_{load}\left. (t \right.) \\ V_{f} \end{bmatrix} u(t)=Vg(t)Iload(t)Vf
y(t)=V(t)y(t) = V(t)y(t)=V(t)
C2=[RC11] C_2 = \begin{bmatrix} R_{C1} & 1 \end{bmatrix}C2=[RC11]
E2=[0−RC10] E_2 = \begin{bmatrix} 0 & - R_{C1} & 0 \end{bmatrix}E2=[0−RC10]
也可以表示如下:
dx(t)dt=A2 x(t)+B2 u(t){\frac{d\mathbf{x(t)}}{dt} = \mathbf{A}_{\mathbf{2}}\mathbf{\ x(t) +}\mathbf{B}_{\mathbf{2}}\mathbf{\ u(t)}} dtdx(t)=A2 x(t)+B2 u(t)
y(t)=C2x(t)+E2u(t){\mathbf{y(t) =}\mathbf{C}_{\mathbf{2}}\mathbf{x(t) +}\mathbf{E}_{\mathbf{2}}\mathbf{u(t)}}y(t)=C2x(t)+E2u(t)
对应的MATLAB脚本如下
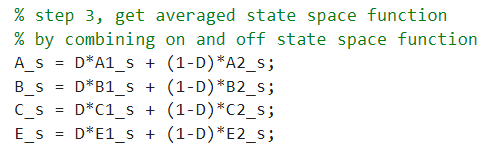
然后将0~DT期间和DT~T期间的状态空间方程矩阵按照权重D整合在一起,可得
A=D(t)A1+(1−D(t))A2=D(t)[−(RL1+Ron)L1000]+(1−D(t))[−(RL1+RC1)L1−1L11C10]\mathbf{A = D(t)}\mathbf{A}_{\mathbf{1}}\mathbf{+ (1 - D(t))}\mathbf{A}_{\mathbf{2}}\mathbf{=}D(t)\begin{bmatrix}
\frac{- \left( R_{L1} + R_{on} \right)}{L_{1}} & 0 \\
0 & 0
\end{bmatrix} + (1 - D(t))\begin{bmatrix}
\frac{- \left( R_{L1} + R_{C1} \right)}{L_{1}} & \frac{- 1}{L_{1}} \\
\frac{1}{C_{1}} & 0
\end{bmatrix} A=D(t)A1+(1−D(t))A2=D(t)[L1−(RL1+Ron)000]+(1−D(t))[L1−(RL1+RC1)C11L1−10]
=[−RL1−D(t)Ron−(1−D(t))RC1L1−(1−D(t))L1(1−D(t))C10]= \begin{bmatrix}
\frac{- R_{L1} - D(t)R_{on} - (1 - D(t))R_{C1}}{L_{1}} & \frac{- (1 - D(t))}{L_{1}} \\
\frac{(1 - D(t))}{C_{1}} & 0
\end{bmatrix}=[L1−RL1−D(t)Ron−(1−D(t))RC1C1(1−D(t))L1−(1−D(t))0]
B=D(t)B1+(1−D(t))B2=D(t)[1L1000−1C10]+(1−D(t)) [1L1RC1L1−1L10−1C10]{\mathbf{B = D(t)}\mathbf{B}_{\mathbf{1}}\mathbf{+ (1 - D(t))}\mathbf{B}_{\mathbf{2}}\mathbf{=}D(t)\begin{bmatrix}
\frac{1}{L_{1}} & 0 & 0 \\
0 & \frac{- 1}{C_{1}} & 0
\end{bmatrix} + (1 - D(t))\ \begin{bmatrix}
\frac{1}{L_{1}} & \frac{R_{C1}}{L_{1}} & \frac{- 1}{L_{1}} \\
0 & \frac{- 1}{C_{1}} & 0
\end{bmatrix} }B=D(t)B1+(1−D(t))B2=D(t)[L1100C1−100]+(1−D(t)) [L110L1RC1C1−1L1−10]
=[1L1RC1(1−D(t))L1−(1−D(t))L10−1C10]= \begin{bmatrix}
\frac{1}{L_{1}} & \frac{R_{C1}(1 - D(t))}{L_{1}} & \frac{- (1 - D(t))}{L_{1}} \\
0 & \frac{- 1}{C_{1}} & 0
\end{bmatrix}=[L110L1RC1(1−D(t))C1−1L1−(1−D(t))0]
C=D(t)C1+(1−D(t))C2=D(t)[01]+(1−D(t))[RC11]{\mathbf{C = D(t)}\mathbf{C}_{\mathbf{1}}\mathbf{+ (1 - D(t))}\mathbf{C}_{\mathbf{2}}\mathbf{=}D(t)\begin{bmatrix}
0 & 1
\end{bmatrix} + (1 - D(t))\begin{bmatrix}
R_{C1} & 1
\end{bmatrix} }C=D(t)C1+(1−D(t))C2=D(t)[01]+(1−D(t))[RC11]
=[(1−D(t))RC11]= \left\lbrack (1 - D(t))\begin{matrix}
R_{C1} & 1
\end{matrix} \right\rbrack=[(1−D(t))RC11]
E=D(t)E1+(1−D(t))E2=D(t)[0−RC10]+(1−D(t))[0−RC10]{\mathbf{E = D(t)}\mathbf{E}_{\mathbf{1}}\mathbf{+ (1 - D(t))}\mathbf{E}_{\mathbf{2}}\mathbf{=}D(t)\begin{bmatrix}
0 & - R_{C1} & 0
\end{bmatrix} + (1 - D(t))\begin{bmatrix}
0 & - R_{C1} & 0
\end{bmatrix} }E=D(t)E1+(1−D(t))E2=D(t)[0−RC10]+(1−D(t))[0−RC10]
=[0−RC10]= \begin{bmatrix}
0 & - R_{C1} & 0
\end{bmatrix}=[0−RC10]
整合后的平均状态空间方程表示如下:
dx(t)dt=A x(t)+B u(t){\frac{d\mathbf{x(t)}}{dt} = \mathbf{A\ x(t) + B\ u(t)}}dtdx(t)=A x(t)+B u(t)
y(t)=Cx(t)+Eu(t)\mathbf{y(t) = Cx(t) + Eu(t)}y(t)=Cx(t)+Eu(t)
对应的MATLAB脚本如下
 {width=“5.031952099737532in”
{width=“5.031952099737532in”
height=“1.531463254593176in”}




)




)



)
)




