推挽和开漏是单片机的输出模式,属于I/O口配置的常见类型。
开漏(Open-Drain)和推挽(Push-Pull)是两种根本不同的输出电路结构,理解它们的区别是正确使用任何单片机(包括51和STM32)GPIO的关键。
一、核心比喻
推挽输出 (Push-Pull):就像两个人力气很大的水手,一个专门负责从井里打水(推,输出高电平),另一个专门负责把水倒掉(挽,输出低电平)。他们能主动且有力地输出明确的“有水”(1)或“没水”(0)状态。
形象:双向主动,驱动能力强。
开漏输出 (Open-Drain):就像只有一个负责倒水的水手,他能很用力地把水倒掉(输出强低电平0),但他完全不会打水。当他不倒水时,输出状态是悬空的(高阻态),相当于“不表态”。这个“不表态”的状态需要外部一个上拉电阻拉到“有水”(1)的状态,才能真正形成高电平。
形象:只能主动拉低,不能主动拉高,需要外部帮助。
二、电路原理与区别
为了更直观地理解,可以参考下面的简化电路模型:
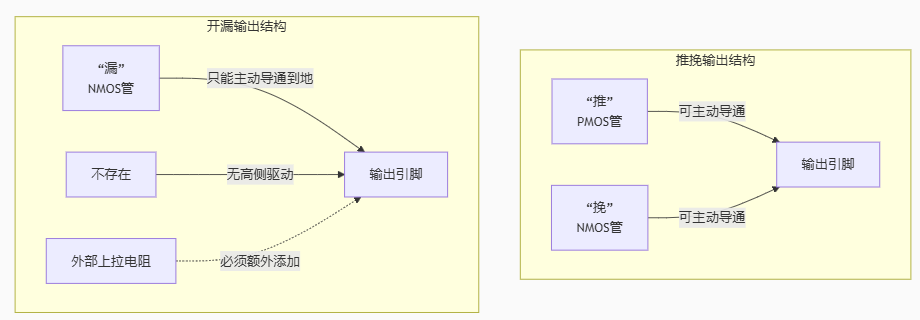
如图所示,它们的根本区别在于:
推挽:内部有上下两个MOS管,总是处于一个导通另一个截止的状态,因此可以独立、强效地输出高电平和低电平。
开漏:内部只有下拉的MOS管(NMOS)。当这个管子导通时,输出被强力拉到低电平(GND);当它截止时,输出引脚与地断开(“开路”或“漏极开路”),相当于断开状态,其电平由外部电路决定。
三、应用场景
基于以上根本区别,它们的使用场景完全不同:
什么时候用 推挽输出?
推挽输出是最常用的模式,用于绝大多数需要直接驱动负载和数字信号输出的场景。
驱动LED、继电器、蜂鸣器等器件:
因为推挽输出高低电平均有较强的驱动能力(例如STM32引脚可输出和吸收几十mA电流),可以直接点亮LED或驱动小型继电器。
数字通信协议(单向、高速):
如 SPI、I2S、USB、SDIO 等。这些协议需要清晰的、驱动能力强的波形来保证通信速度和稳定性。推挽输出可以提供快速上升沿和下降沿。
生成PWM波:
驱动电机、舵机等都需要清晰的PWM波形,必须使用推挽输出。
简单总结:只要你需要引脚自己独立、明确、有力地输出高电平和低电平,就用推挽输出。
什么时候用 开漏输出?
开漏输出主要用于需要 “线与”(Wire-AND)、电平转换 和 双向通信 的场景。
实现“线与”功能(最经典的用途):
多个开漏输出的引脚可以直接连接在一起,共用一个上拉电阻。
规则:只要任何一个输出脚主动输出低电平(0),整个线路就是低电平(0)。只有当所有输出脚都释放(不输出低电平,即高阻态)时,线路才被上拉电阻变为高电平(1)。
应用:I2C 总线是开漏输出最典型的例子。I2C上的多个设备都可以通过拉低总线来发送信号,而不会因为一个设备输出高电平另一个输出低电平而产生短路冲突。这实现了多主机仲裁和双向通信。
电平转换(Voltage Level Shifting):
这是开漏输出一个极其有用的特性。因为开漏引脚本身不产生高电平,高电平电压完全由外部上拉电阻所连接的电源电压(VCC)决定。
例子:STM32是3.3V供电,但需要和一个工作电压为5V的设备通信。可以将STM32引脚设置为开漏模式,外部上拉电阻接到5V。当STM32输出低电平(0)时,是0V;当STM32释放总线(输出1)时,线路被上拉到5V。这样就实现了从3.3V到5V的电平转换,非常简单成本低。
驱动高于芯片电压的设备:
原理同上。比如用3.3V单片机驱动一个5V的继电器线圈,就可以使用开漏模式,外接5V上拉。
四、对比总结表
| 特性 | 推挽输出 (Push-Pull) | 开漏输出 (Open-Drain) |
|---|---|---|
| 输出能力 | 强,可主动输出高电平和低电平 | 弱,只能主动输出低电平,高电平靠外部上拉 |
| 输出状态 | 确定(永远是0或1) | 不确定(不输出时呈高阻态,电平由外部决定) |
| 速度 | 快,上升沿和下降沿都较陡峭 | 慢,上升沿依靠上拉电阻,电阻越大速度越慢 |
| 功耗 | 高低电平切换时存在瞬时导通电流,功耗相对较高 | 静态功耗低,但上升沿慢可能导致动态功耗增加 |
| 关键应用 | 1. 驱动LED、继电器等 2. SPI, I2S等高速总线 3. 产生PWM波 | 1. I2C、One-Wire等支持“线与”的总线 2. 电平转换 3. 驱动高于芯片电压的设备 |
简单决策流程:
驱动普通外设(LED、数码管等)? -> 推挽输出
用在I2C总线上? -> 开漏输出 (注意:I2C协议必须用开漏模式!)
需要和不同电压的器件通信? -> 开漏输出 + 外部上拉到目标电压
不确定? -> 优先选择推挽输出,这是最通用和直接的模式。

如何赋能全球分布式团队协作)





)






 实现)




)