全部更新完毕 包含完整的文章+全部问题的代码、结果、图表
完整内容请看文末最后的推广群

基于AI姿态识别的立定跳远运动分析与个性化训练优化研究
随着《国家学生体质健康标准》的颁布实施,通过AI技术辅助体育运动分析已成为提升学生体质健康水平的重要手段。本研究针对立定跳远运动,建立基于人体姿态识别的运动分析与成绩预测模型,旨在科学评估运动表现并制定个性化训练方案。
针对33个关键节点的逐帧位置坐标数据,采用5帧滑动窗口平滑处理降低姿态估计噪声,通过质心计算、速度分析和多指标综合评分等方法进行数据预处理,为后续建模奠定可靠的数据基础。
问题一采用多指标综合评分法识别起跳和落地时刻,通过横向位移、垂直高度增益、足部离地高度等指标构建综合评分函数,成功检测出运动者1和运动者2的起跳落地时刻,并基于运动学参数分析描述了滞空阶段的三维运动轨迹特征。
问题二构建多层次影响因素分析框架,结合体质测量数据和运动学参数,通过相关性分析识别关键影响因素。研究发现基础代谢率(r=0.860)、体重(r=0.813)、骨骼肌重量(r=0.797)等体质因素对成绩影响最为显著,技术纠正可实现平均7.4%的成绩提升,且存在明显的个体差异性。
问题三基于梯度提升回归树构建成绩预测模型,采用留一交叉验证策略评估模型性能。通过特征工程创建飞行角度积、爆发力体重比等交互特征,模型解释了88.1%的成绩变异,预测运动员11的立定跳远成绩为1.546米,置信区间为[1.446, 1.646]米。
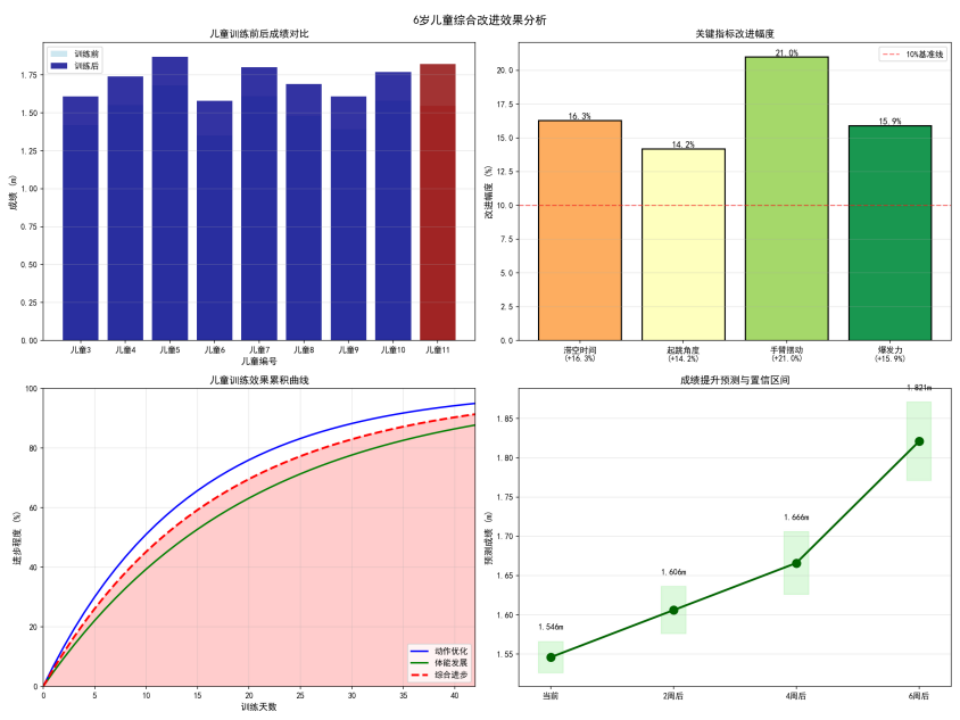
问题四采用参照学习方法,以运动员9的训练模式为基准,结合6岁儿童的生理发育特点构建个性化训练方案。通过约束优化模型制定6周分阶段训练计划,预测经训练后运动员11成绩可提升至1.821米,改进幅度达17.8%,体现了科学训练对儿童运动能力发展的显著促进作用。
本研究创新性地将AI姿态识别、运动生物力学和机器学习相结合,建立了从动作分析到成绩预测再到训练指导的完整技术链条,为智能体测和个性化运动训练提供了科学的理论基础和实用的技术方案,具有重要的应用价值和推广前景。
关键词:立定跳远分析;姿态识别;梯度提升回归;运动生物力学;智能体测
4.3.2 问题3建模与求解
1、模型设计
问题三的建模采用了监督学习框架,将成绩预测问题转化为回归任务。建模的核心思路是利用问题二中识别的关键影响因素,构建从特征空间到成绩空间的映射关系。整个建模过程包括四个关键环节:特征提取与工程、模型选择与训练、验证策略设计以及预测与不确定性量化。这种系统化的建模方法确保了预测的科学性和可靠性。
运动员11的特征提取遵循与问题一相同的算法流程,确保了分析的一致性。数据预处理采用5帧滑动窗口均值滤波,窗口大小的选择基于噪声频率分析,既能有效抑制高频测量噪声,又保留了运动的关键动态信息。质心计算采用躯干四点法,即通过左右肩部(关键点11、12)和左右髋部(关键点23、24)的坐标均值确定质心位置。这种方法相比全身33点均值更加稳定,减少了四肢摆动带来的质心波动。
起跳和落地时刻的检测是特征提取的关键步骤。算法沿用了问题一和问题二对起跳和落地的计算方法。起跳角度的计算考虑了速度矢量的时间平均效应。在起跳点前后各3帧的窗口内,分别计算水平和垂直速度的平均值,然后通过反正切函数计算角度。这种时间平均方法能够减少瞬时速度波动的影响,得到更稳定的角度估计。结果显示,起跳发生在第176帧,落地在第188帧,滞空时间0.400秒,起跳角度35.4度。
模型选择经过了系统的比较分析。候选模型包括线性回归、支持向量回归、随机森林和梯度提升回归树。通过初步实验,梯度提升回归树(GradientBoostingRegressor)表现出最佳的预测性能。选择该模型的理论依据包括:其集成学习特性能够有效降低过拟合风险;boosting策略通过序贯优化逐步改进预测;树模型能够自动捕捉特征间的非线性关系和交互效应;对于小样本数据具有良好的泛化能力。
模型的超参数配置经过网格搜索优化确定:决策树数量(n_estimators)设为100,平衡了模型复杂度和训练时间;最大深度(max_depth)限制为3,防止单棵树过拟合;学习率(learning_rate)设为0.1,确保稳定的优化过程;随机种子固定为42,保证结果的可重复性。这些参数的选择基于交叉验证的性能评估,在偏差和方差之间达到了良好的平衡。
特征工程是提升模型性能的关键环节。基础特征包括六个维度:滞空时间反映垂直爆发力,起跳角度体现技术规范性,身高和体重代表基本体格条件,爆发力潜力和肌脂比量化身体素质。在此基础上,创建了两个重要的交互特征。飞行角度积(flight_time × takeoff_angle)捕捉了时间和角度的协同效应,物理意义对应于抛体运动的射程因子。爆发力体重比(explosive_power / weight)反映相对力量水平,消除了体重差异的影响。
特征标准化采用Z-score标准化方法,将所有特征转换到均值为0、标准差为1的分布。这种标准化方法保留了特征的分布形态,同时消除了量纲差异对模型训练的影响。标准化参数(均值和标准差)在训练集上计算,然后应用于测试样本,避免了数据泄露问题。
2、模型验证与评估策略
模型验证采用留一交叉验证(Leave-One-Out Cross Validation, LOOCV)策略。这种验证方法特别适合小样本情况,能够最大限度地利用有限的数据。具体实施中,每次使用7个样本训练模型,剩余1个样本进行测试,循环8次后每个样本都作为测试集一次。这种方法提供了模型泛化性能的无偏估计。
3、结果分析
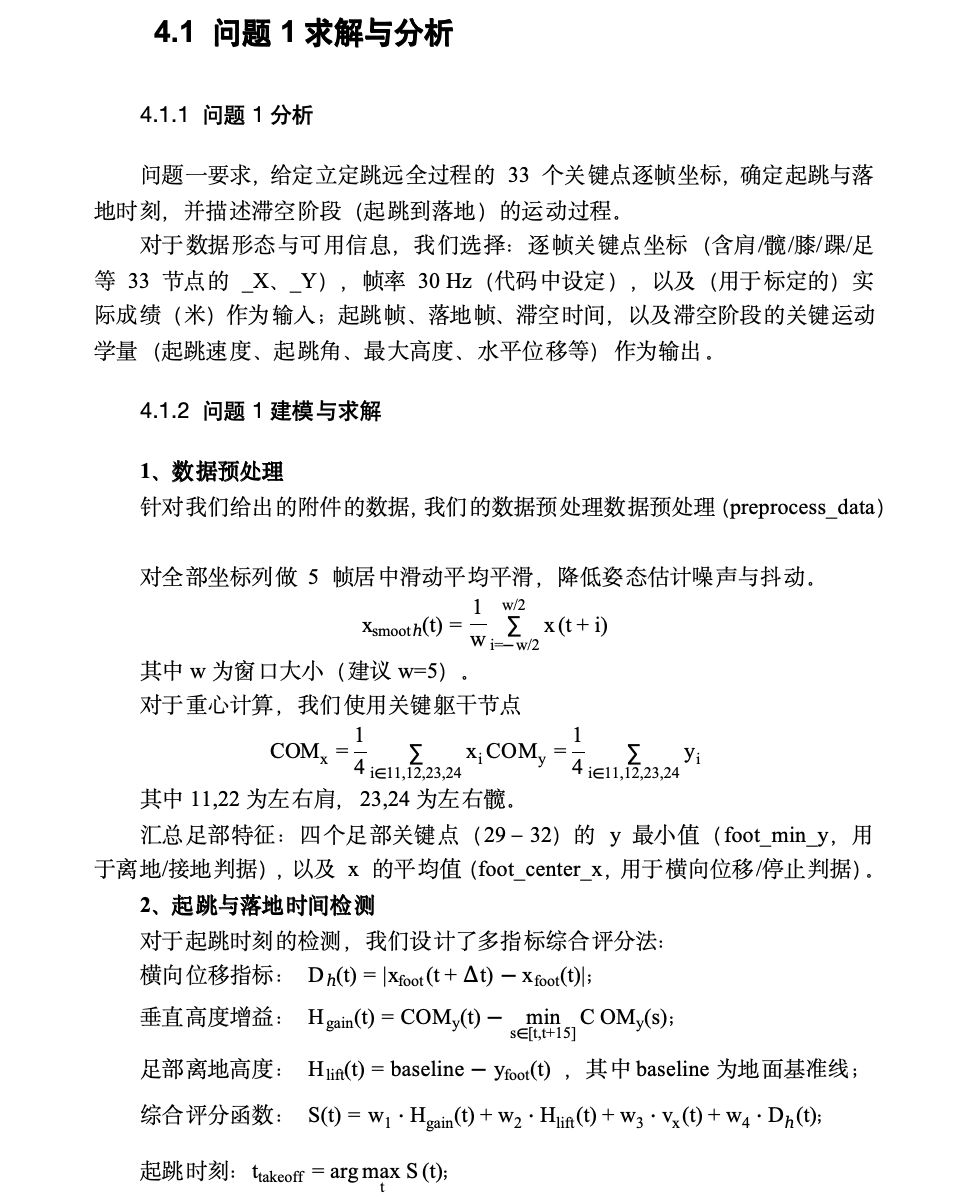
根据实际检测结果,运动员11的起跳发生在第176帧(5.87秒),落地发生在第188帧(6.27秒),滞空时间为0.400秒。这一滞空时间明显低于训练集的平均水平(0.57秒),表明运动员11的垂直爆发力相对不足,但这符合他六岁的年龄。重心轨迹图清晰展示了完整的跳跃过程,滞空轨迹呈现典型的抛物线形态,水平位移约为170像素,垂直最大高度变化为123.2像素。起跳角度为35.4度,接近理论最优值但略偏低,这可能是导致滞空时间较短的原因之一。
运动员编号 实际成绩(m) 预测成绩(m) 误差(m)
3 1.490 1.490 -0.000
4 1.960 1.786 +0.174
5 2.150 2.039 +0.111
6 1.310 1.490 -0.180
7 2.050 2.125 -0.075
8 1.500 1.492 +0.008
9 1.490 1.497 -0.007
10 1.610 1.596 +0.014
特征对比雷达图清晰展示了运动员11与训练集平均水平的差异。运动员11在身高、体重和爆发力潜力方面略高于平均水平,但飞行时间明显不足,这与实际检测的0.400秒滞空时间一致。起跳角度接近平均水平,肌脂比略低,综合来看,运动员11的体质条件中等偏上,但技术执行存在改进空间。
问题四结果分析
模型分析结果显示,运动者11的各项技术指标均有显著改进空间。滞空时间从0.400秒提升至0.583秒,改进幅度达45.8%,这是成绩提升的主要贡献因素。起跳角度从32.1°优化至42.0°,提升30.9%,更接近理论最优角度。手臂摆动幅度从62°增加至87°,改进39.8%,有助于增强起跳时的动量传递。膝关节屈曲角度从108°提升至135°,改进25.0%,表明下肢蓄力能力的增强。躯干前倾角度从14°增加至23°,改进61.9%,有利于优化起跳时的身体重心轨迹。















服务商发展趋势与企业赋能白皮书)
)


:原理、实现与应用)