Title
题目
Upper-body free-breathing Magnetic Resonance Fingerprinting applied tothe quantification of water T1 and fat fraction
用于水T1值和脂肪分数量化的上半身自由呼吸磁共振指纹成像
01
文献速递介绍
磁共振指纹成像(MRF)是十年前推出的一种高效成像范式,可实现多种MRI参数的快速同步量化(Ma等,2013)。MRF的核心原理是采集一系列高度欠采样图像,随后逐像素与预先计算的元素字典(即“指纹”)进行拟合,以提取潜在的组织参数。在MRF可测量的众多参数中,脂肪分数(FF)、水的T1值(𝑇1𝐻2𝑂)、水的T2值(𝑇2𝐻2𝑂)和/或脂肪的T1值(𝑇1𝑓𝑎𝑡)已在多个解剖部位被证实为极具潜力的影像生物标志物,包括心脏(Jaubert等,2020c,2021)、肝脏(Jaubert等,2020a;Velasco等,2022)和骨骼肌(Cencini等,2019;Marty和Carlier,2020;Ostenson等,2019)。例如,Marty和Carlier(2020)提出的MRF T1-FF序列已被用于骨骼肌组织的𝑇1𝐻2𝑂和FF定量监测。该方法已在3T磁场下应用于不同神经肌肉疾病患者的下肢肌肉,能够联合重建𝑇1𝐻2𝑂、𝑇1𝑓𝑎𝑡、FF、B0和B1图(Marty等,2021b;Gerhalter等,2021;Fromes等,2023)。然而,由于生理运动(尤其是呼吸运动)的影响,在上半身测量这些参数面临诸多挑战。 具体而言,呼吸肌(如肋间肌和膈肌)属于薄组织结构,在神经肌肉疾病中常受累及。患者往往会出现明显不适,有时甚至需要通气支持。尽管已采用超声、脂肪饱和T2加权MRI等定性成像技术(Vieira Santana等,2020;Cicero等,2020)以及MR肺活量测定等功能成像技术(Harlaar等,2022)对这些关键目标进行研究,但由于呼吸运动带来的挑战,能够在功能障碍显现前早期识别结构异常的定量MRI尚未开展。 在定性笛卡尔MRI中,呼吸运动常导致相位编码方向出现模糊和伪影(Wood和Henkelman,1985)。在非笛卡尔MRI中,尽管k空间中心经多次采样可减少伪影(Glover和Pauly,1992),但模糊问题依然存在。早期观察表明,运动引起的伪影对定量MRI影响显著,会导致参数估计偏差(Giri等,2012)。 因此,学界提出了多种方法以减轻MRI中的呼吸运动影响。通常,第一步是在采集过程中检测运动,将数据划分为多个呼吸时相。这可通过多种方式实现,例如将用于测量腹腔扩张与收缩的呼吸波纹管置于患者腹部周围(Ehman等,1984)。但该技术的运动检测准确性可能受波纹管放置位置和患者呼吸强度影响(Santelli等,2011)。近期开发的Pilot Tone设备通过发射固定频率的射频波(该频率超出MRI采集带宽)解决了这一问题(Solomon等,2021)。这种射频波会受到多种运动(主要是呼吸运动)的调制。Pilot Tone的优势在于其在磁体孔内的放置灵活,对患者的依赖性较低。 另一种方法是在MRI序列中集成门控辐条(或导航器),按精确时间间隔沿特定方向采集身体的低分辨率图像(Ehman和Felmlee,1989)。随后可追踪肺-肝界面等解剖结构的运动,将数据分类至不同呼吸时相。后一种方法与MRI序列本身同步,无需外部设备。 将采集的数据分入不同呼吸时相后,可采用多种策略进行运动校正。第一种方法是保留单一呼吸时相的数据(通常为完全呼气时相,因其持续时间往往长于其他时相)(Huang等,2021)。但这种方法会丢弃大量数据,可能引发欠采样问题。一种前瞻性解决方案是延长MRI采集时间,以收集足够数据重建所需呼吸时相(Ehman等,1984)。尽管如此,该方法不可避免地会延长扫描时间。为利用所有呼吸时相的数据,回顾性运动校正(MoCo)方法应运而生。 部分方法直接在k空间中进行运动校正,例如自动聚焦法,其通过应用相位校正来最小化图像梯度熵(Atkinson等,1997)。但该方法主要适用于校正刚性变形或分段刚性变形,需对每个线圈的k空间单独校正(Cheng等,2012)。对于自由形式的变形,首选在图像空间中进行校正。一种方法是通过引入低秩约束(如多任务处理)同时重建所有运动状态的图像(Christodoulou等,2018)。这些方法的优势在于无需估计不同状态间的运动场。但最小化问题的维度可能较大,且可能存在不适定性,因此难以适用于高分辨率3D成像。另一种方法是先在低分辨率图像上估计变形场,再应用该场将所有图像配准至同一参考图像。定性MRI中已提出高维总变分运动校正(MoCo-HDTV)等方法(Rank等,2017),通过迭代估计变形场和重建图像,并在每一步后逐步提高空间分辨率,来重建受运动干扰的图像。针对1.5T的MRF,Cruz等(2022)提出利用来自不同运动状态的去噪单个体积估计变形场,随后将该变形场纳入单个体积的最小二乘重建中,以便在模式匹配后生成MRF图。然而,3T磁场下视野内更大的B1变化,加之MRF T1-FF序列的径向采集方案导致的欠采样伪影增加,使得获取质量足够的运动分辨单个体积用于图像配准面临挑战。 在本研究中,我们提出一种新颖的运动校正MRF T1-FF(MoCo MRF T1-FF)方法,通过优化的初步运动扫描迭代估计运动场,并在模式匹配前应用该运动场校正MRF采集数据,以重建上半身区域的运动校正参数图。从方法学角度而言,该方法有两项重要贡献:通过使用具有单独优化对比度采集参数的初步运动扫描,可精确估计变形场,使该方法具备模块化特点。因此,MRF扫描可仅针对定量参数估计进行优化,无需考虑变形场估计问题。从应用角度来看,本研究为在极少被研究的区域(如呼吸肌,尤其是肋间肌和膈肌)中实现FF和𝑇1𝐻2𝑂的3D联合量化奠定了基础。
Abatract
摘要
Over the past decade, Magnetic Resonance Fingerprinting (MRF) has emerged as an efficient paradigm forthe rapid and simultaneous quantification of multiple MRI parameters, including fat fraction (FF), water T1(𝑇 1𝐻2𝑂), water T2 (𝑇 2𝐻2𝑂), and fat T1 (𝑇 1𝑓 𝑎𝑡). These parameters serve as promising imaging biomarkers invarious anatomical targets such as the heart, liver, and skeletal muscles. However, measuring these parametersin the upper body poses challenges due to physiological motion, particularly respiratory motion. In this work,we propose a novel approach, motion-corrected (MoCo) MRF T1-FF, which estimates the motion field using anoptimized preliminary motion scan and uses it to correct the MRF acquisition data before dictionary search forreconstructing motion-corrected FF and 𝑇 1𝐻2𝑂 parametric maps of the upper-body region. We validated thisframework using an in vivo dataset comprising 18 healthy volunteers (12 men, 6 women, mean age = 40 ± 14years old) and a 3 subjects with different neuromuscular disorders. At the ROI level, in regions minimallyaffected by motion, no significant bias was observed between the uncorrected and MoCo reconstructions forFF (mean difference of -0.6%) and 𝑇 1𝐻2𝑂 (−5.5 ms) values. Moreover, MoCo MRF T1-FF significantly reducedthe standard deviations of distributions assessed in these regions, indicating improved precision. Notably, inregions heavily affected by motion, such as respiratory muscles, liver, and kidneys, the MRF parametric mapsexhibited a marked reduction in motion blurring and streaking artifacts after motion correction. Furthermore,the diaphragm was consistently discernible on parametric maps after motion correction. This approach laysthe groundwork for the joint 3D quantification of FF and 𝑇 1𝐻2𝑂 in regions that are rarely studied, such as therespiratory muscles, particularly the intercostal muscles and diaphragm.
在过去十年中,磁共振指纹成像(MRF)已成为一种高效的成像范式,能够快速且同步地量化多种MRI参数,包括脂肪分数(FF)、水的T1值(𝑇1𝐻2𝑂)、水的T2值(𝑇2𝐻2𝑂)以及脂肪的T1值(𝑇1𝑓𝑎𝑡)。这些参数在心脏、肝脏和骨骼肌等多种解剖部位中均是极具潜力的影像生物标志物。然而,由于生理运动(尤其是呼吸运动)的影响,在上半身测量这些参数面临诸多挑战。 在本研究中,我们提出了一种新颖的运动校正(MoCo)MRF T1-FF方法。该方法通过优化的初步运动扫描估计运动场,并在字典搜索重建上半身区域的运动校正后脂肪分数(FF)和水的T1值(𝑇1𝐻2𝑂)参数图之前,利用该运动场对MRF采集数据进行校正。我们使用包含18名健康志愿者(12名男性、6名女性,平均年龄为40±14岁)和3名不同神经肌肉疾病患者的在体数据集对该框架进行了验证。 在感兴趣区域(ROI)层面,在受运动影响最小的区域中,未校正重建与运动校正重建的脂肪分数(FF)值(平均差异为-0.6%)和水的T1值(𝑇1𝐻2𝑂)(平均差异为-5.5 ms)之间未观察到显著偏差。此外,运动校正MRF T1-FF显著降低了这些区域中测量值分布的标准差,表明精度得到改善。值得注意的是,在呼吸肌、肝脏和肾脏等受运动严重影响的区域,运动校正后MRF参数图的运动模糊和条纹伪影显著减少。而且,运动校正后的参数图上能清晰识别膈肌。 该方法为在呼吸肌(尤其是肋间肌和膈肌)等极少被研究的区域中实现脂肪分数(FF)和水的T1值(𝑇1𝐻2𝑂)的联合3D量化奠定了基础。
Method
方法
2.1. MR acquisition framework
The MR acquisition framework comprised two separate scans: firstly,a 3D radial stack-of-stars Fast Low Angle Shot (FLASH) sequence, referred to as the ‘‘motion scan’’, was used for estimating the deformationfields between the different respiratory phases. This was followed bythe 3D MRF T1-FF sequence, as proposed in Marty et al. (2021a) anacquisition specifically designed for joint estimation of 𝑇 1𝐻2𝑂, FF, B0,B1 and 𝑇 1𝐹 𝑎𝑡, to monitor muscle tissue alterations in subjects withneuromuscular diseases. The MRF T1-FF sequence consists of 1400golden angle radial spokes, incorporating varying echo times and flipangles allowing the reconstruction of a time-series of 175 undersampledimages at different contrasts (Marty and Carlier, 2020). The 3D MRFT1-FF sequence follows this principle, acquiring partitions sequentiallyto form a time-series of 175 3D volumes using a golden angle stack-ofstars radial sampling scheme (Feng, 2022). It can also be undersampledin the partition direction to accelerate the acquisition (Marty et al.,2021a).Navigators were inserted every 28 spokes within both sequences totrack the lung/liver interface during acquisition with a sampling frequency of approximately 10 Hz. These 1D gating spokes were centeredat a TE of 2.39 ms, to put water and fat signals in phase, therebymaximizing the liver signal and thus the contrast between the lungand liver. These navigators were acquired in the head-foot direction,with the readout center positioned around the dome of the liver anda field of view of 25 cm. A slice-selective RF pulse was applied with aslice thickness of 3 cm to obtain high signal-to-noise ratio and sufficientcontrast by minimizing the amount of subcutaneous fat projected ontothe navigator image. This parameter was empirically optimized byvisually analyzing the sharpness of the lung/liver interface on thenavigator images as a function of slice thickness in healthy volunteers.The 3D MRF T1-FF sequence diagram is provided in Fig. S1.
2.1. 磁共振采集框架 磁共振采集框架包含两次独立扫描:首先,采用3D径向堆叠星状快速小角度激发(FLASH)序列(简称“运动扫描”),用于估计不同呼吸时相间的变形场。随后,采用Marty等人(2021a)提出的3D MRF T1-FF序列——这是一种专为联合估计水的T1值(𝑇1𝐻2𝑂)、脂肪分数(FF)、B0、B1和脂肪的T1值(𝑇1𝐹𝑎𝑡)设计的采集序列,旨在监测神经肌肉疾病患者的肌肉组织变化。 MRF T1-FF序列包含1400个黄金角径向辐条,通过整合不同的回波时间和翻转角,能够重建175幅不同对比度的欠采样图像时间序列(Marty和Carlier,2020)。3D MRF T1-FF序列遵循这一原理,采用黄金角堆叠星状径向采样方案依次采集分区,形成包含175个3D体积的时间序列(Feng,2022)。为加快采集速度,该序列还可在分区方向进行欠采样(Marty等人,2021a)。 在两个序列中,每28个辐条插入一个导航器,以约10 Hz的采样频率在采集过程中追踪肺/肝界面。这些1D门控辐条的回波时间(TE)中心设为2.39 ms,使水和脂肪信号处于同相状态,从而最大化肝脏信号,增强肺与肝之间的对比度。导航器沿头-足方向采集,读出中心位于肝脏顶部附近,视野为25 cm。施加层选择性射频脉冲,层厚为3 cm,通过减少投射到导航器图像上的皮下脂肪量,以获得高信噪比和足够的对比度。该参数是通过在健康志愿者中视觉分析不同层厚下导航器图像上肺/肝界面的清晰度,经经验优化确定的。3D MRF T1-FF序列示意图见图S1。
Conclusion
结论
In this study, we introduced a modular acquisition approach comprising a preliminary motion scan for estimating deformation fields,followed by an MRF scan for quantifying multiple parameters, accompanied by a reconstruction framework for iteratively reconstructing motion-corrected MRF singular volumes. This methodology significantly mitigated motion blurring and streaking artifacts in resulting3D 𝑇 1𝐻2𝑂 and FF parametric maps with a spatial resolution of 1𝑥1 𝑥 5 mm3 , leading to marked improvements in precision. Consequently, accurate detection and delineation of moving structureswas consistently achieved, with measured values aligning closely withthose reported in the literature. These advancements pave the way forquantifying FF and 𝑇 1𝐻2𝑂 in regions previously challenging to assessdue to motion, such as the respiratory muscles.
在本研究中,我们提出了一种模块化采集方法,该方法包括用于估计形变场的初步运动扫描、用于量化多参数的MRF扫描,以及用于迭代重建运动校正后MRF奇异容积的重建框架。此方法显著减轻了空间分辨率为1×1×5 mm³的3D 𝑇1𝐻2𝑂和FF参数图中的运动模糊与条状伪影,大幅提升了测量精度。因此,我们能够稳定实现对运动结构的准确检测与清晰勾勒,且测量值与文献报道结果高度一致。这些进展为量化此前因运动干扰而难以评估的区域(如呼吸肌)的FF和𝑇1𝐻2𝑂值奠定了基础。
Results
结果
The total processing time per patient was approximately 7 h, including over 3 h for training the neural network on the input motion scanvolumes for deformation field estimation, which, at this stage, was donefor every dataset. The training used around 44 gigabits of GPU memory.The difference images between the reference respiratory phase andthe other phases, with and without applying registration, show the effectiveness of the displacement field estimation on the motion scan (2)(Fig. 4). Supplementary videos (Fig.S4) demonstrating the registrationresults are also available for one healthy control. In the uncorrectedimages, noticeable movements included the liver descending from fullexpiration to full inspiration, and the abdominal ribcage shifting tothe right. However, in the registered images, differences against thereference phase were greatly reduced for all motion states. The meanand standard deviation of SSIM and NRMSE across all subjects andslices were calculated and reported in Table 1. The mean NRMSEof respiratory phases 2, 3, 4, and 5 against the reference respiratoryphase 1 decreased from 0.10, 0.20, 0.28, and 0.33 to 0.04, 0.06, 0.07,and 0.08, respectively. Similarly, the mean SSIM index increased from98.6%, 96.3%, 94.2%, and 93.2% to 99.8%, 99.6%, 99.5%, and 99.3%,respectively. In contrast, MRF singular volumes suffered from highartefacts and contrast variation across respiratory phases, making themunsuitable for direct deformation field estimation as in Cruz et al.(2022) (Fig. S5 and S6).
每位患者的总处理时间约为7小时,其中包括超过3小时用于在输入的运动扫描容积上训练神经网络以估计形变场——在当前阶段,每个数据集都需要执行这一步骤。训练过程约占用44吉比特的GPU内存。 参考呼吸相位与其他相位的差异图像(无论是否应用配准)显示,运动扫描的位移场估计具有有效性(图4)。补充视频(图S4)也展示了一名健康对照者的配准结果。在未校正的图像中,可观察到明显的运动现象,包括肝脏从完全呼气状态到完全吸气状态时的下移,以及腹部胸腔向右偏移。然而,在配准后的图像中,所有运动状态下与参考相位的差异均大幅减小。 所有受试者和所有层面的结构相似性(SSIM)及归一化均方根误差(NRMSE)的均值与标准差已计算并在表1中呈现。呼吸相位2、3、4、5相对于参考呼吸相位1的平均NRMSE分别从0.10、0.20、0.28、0.33降至0.04、0.06、0.07、0.08;同样,平均SSIM指数分别从98.6%、96.3%、94.2%、93.2%提升至99.8%、99.6%、99.5%、99.3%。 相比之下,MRF奇异容积存在严重的伪影,且不同呼吸相位间的对比度差异较大,因此不适合采用如Cruz等人(2022年)所述的直接形变场估计方法(图S5和S6)。
Figure
图
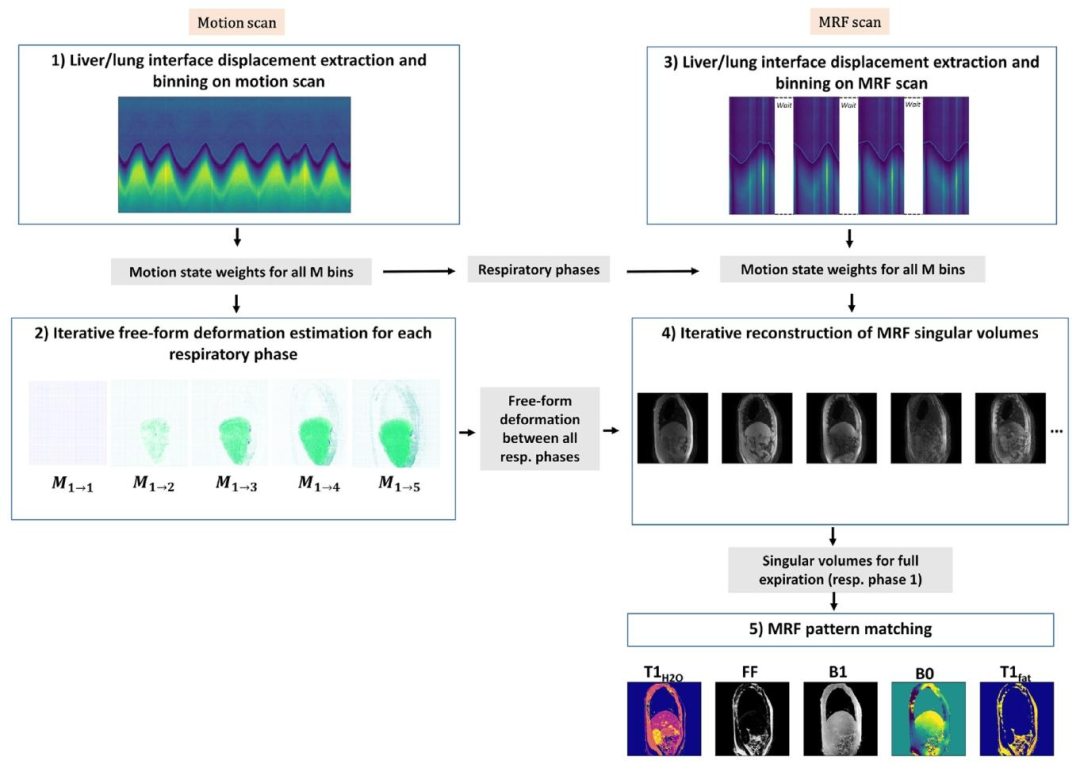
Fig. 1. Diagram illustrating the different steps of the proposed reconstruction framework for reconstructing the motion-corrected parametric maps: (1) Liver/lung interfacedisplacement extraction and binning on the motion scan (Section 2.2.1); (2) Iterative free-form deformation estimation on the motion scan volumes for each respiratory phase(Section 2.2.2); (3) Liver/lung interface displacement extraction and binning on the MRF scan (Section 2.2.1); (4) Iterative reconstruction of MRF singular volumes using thedeformation fields estimated in step 2 (Section 2.2.3); (5) MRF pattern matching using bi-component dictionary matching, as proposed in Slioussarenko et al. (2024), to reconstruct𝑇1𝐻2𝑂, FF, B0, B1 and 𝑇 1𝐹 𝑎𝑡 parametric maps from the motion-corrected singular volumes.
图1. 所提出的运动校正参数图重建框架各步骤示意图: (1)从运动扫描中提取肝/肺界面位移并进行分箱处理(详见2.2.1节); (2)在运动扫描的各呼吸时相体积上迭代估计自由形式变形(详见2.2.2节); (3)从MRF扫描中提取肝/肺界面位移并进行分箱处理(详见2.2.1节); (4)利用步骤2中估计的变形场迭代重建MRF单个体积(详见2.2.3节); (5)采用Slioussarenko等人(2024)提出的双组分字典匹配法进行MRF模式匹配,从运动校正后的单个体积中重建水的T1值(𝑇1𝐻2𝑂)、脂肪分数(FF)、B0、B1和脂肪的T1值(𝑇1𝐹𝑎𝑡)参数图。
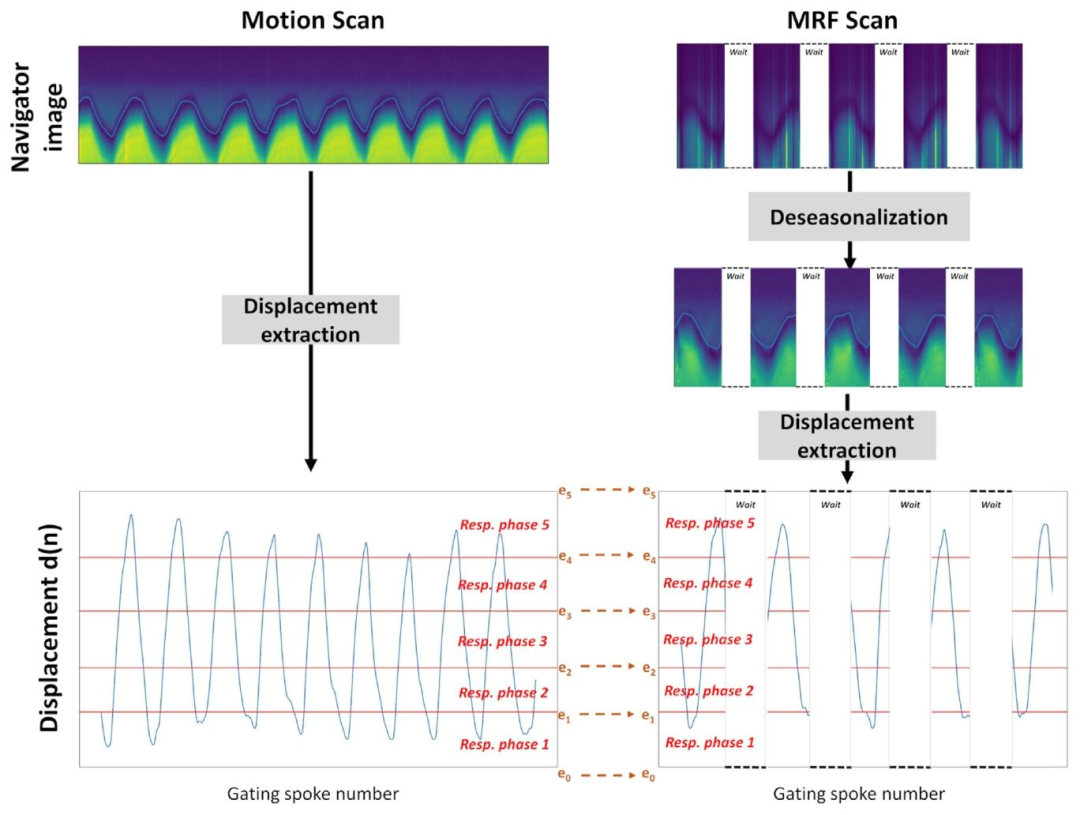
Fig. 2. Representative examples of the liver/lung interface displacement estimation d(n), along with data binning, derived from both motion and 3D MRF T1-FF scans usingnavigator images. The navigator images for the 3D MRF-T1-FF scan undergo a deseasonalization procedure initially to eliminate the seasonal MRF component. The z-coordinatesof each respiratory phases ([𝑒0 , … , 𝑒𝑀 ]) are determined from the motion scan data to ensure an equal number of spokes per respiratory phase. These coordinates were then appliedto bin the MRF scan data. The jumps on the MRF navigator images are due to the fact that there is a recovery time at the end of each repetition to allow for the magnetizationto grow back to equilibrium
图2. 利用导航器图像从运动扫描和3D MRF T1-FF扫描中提取的肝/肺界面位移估计值d(n)及数据分箱的代表性示例 3D MRF-T1-FF扫描的导航器图像首先经过去季节性处理,以消除MRF的季节性成分。各呼吸时相([𝑒0,…,𝑒𝑀])的z坐标由运动扫描数据确定,以确保每个呼吸时相包含相同数量的辐条。这些坐标随后被用于对MRF扫描数据进行分箱。MRF导航器图像上的跳变源于每次重复结束时存在恢复时间,以使磁化强度恢复至平衡状态。
Fig. 3. Illustration of the pole ladder adapted from Lorenzi and Pennec (2014) fortransporting a single deformation between templates 𝑇0 and 𝑇**𝑖 to estimate the stationaryvelocity field (SVF) connecting the reference individual image 𝐼0 and the predictedindividual image 𝐼**𝑖 ′ . Steps include obtaining longitudinal SVF between templates (𝒖),SVF between template and individual image (𝒗), and deriving diffeomorphisms forparallel transport. The resulting parallel transported deformation is obtained throughthe conjugate actions of diffeomorphisms parameterized by SVFs 𝒖 and 𝒗. A truncatedBaker-Campbell-Hausdorff (BCH) formula is used for computations (denotes as 𝛱), anda scaling factor 𝑛 ensures computational efficiency
图3. 基于Lorenzi和Pennec(2014)改编的“极点阶梯”示意图,用于在模板𝑇₀和𝑇ᵢ之间传输单一变形,以估计连接参考个体图像𝐼₀和预测个体图像𝐼ᵢ'的静止速度场(SVF)。 步骤包括:获取模板间的纵向SVF(𝒖)、模板与个体图像间的SVF(𝒗),以及推导用于平行传输的微分同胚。最终的平行传输变形通过由SVF 𝒖和𝒗参数化的微分同胚的共轭作用获得。计算中使用截断的贝克-坎贝尔-豪斯多夫(BCH)公式(记为𝛱),缩放因子𝑛确保计算效率。
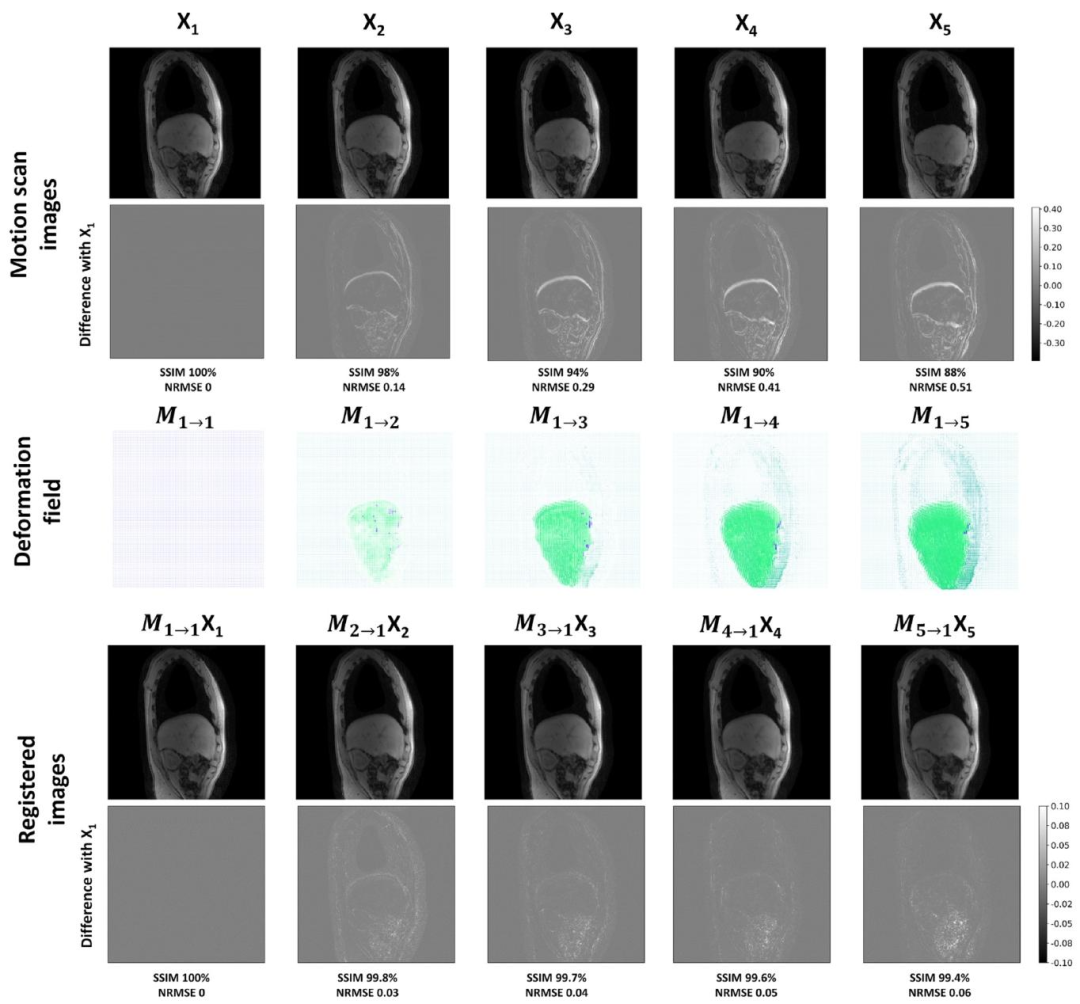
Fig. 4. Deformation field estimation and registration accuracy. The top two rows depict images reconstructed from the motion scan before registration, along with the differencecompared to the reference full expiration respiratory phase (phase 1) for a single sagittal slice in a healthy subject. The third row displays the deformation fields estimated usingVoxelMorph, while the last two rows illustrate the resulting difference images between the reference respiratory phase volume and the registered volume.
图4. 变形场估计与配准精度示例 最上方两行展示健康受试者单个矢状切片在配准前的运动扫描重建图像,以及与参考完全呼气呼吸时相(时相1)的差异图像。第三行显示通过VoxelMorph估计的变形场,最后两行则呈现参考呼吸时相体积与配准后体积的差异图像。
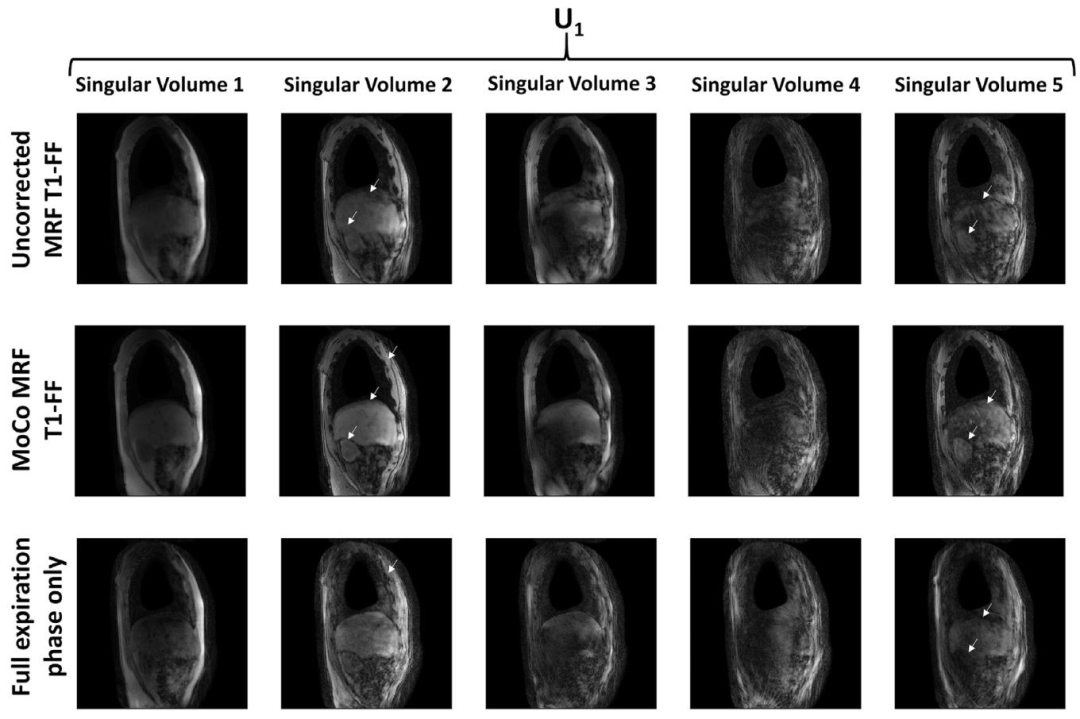
Fig. 5. The first five singular volumes reconstructed from the uncorrected MRF T1-FF sequence reconstructing the singular volumes from a nuFFT on all acquired data withoutbinning or motion correction, the motion-corrected (MoCo) MRF T1-FF data, and from the MRF T1-FF data acquired during the reference respiratory phase only (correspondingto the full-expiration phase). White arrows highlight areas where motion blurring, undersampling artefacts, and weak contrast are notably reduced following motion correction.
图5. 前五幅奇异容积分别通过以下方式重建:未校正的MRF T1-FF序列(基于所有采集数据的nuFFT重建,未进行分箱或运动校正)、运动校正(MoCo)后的MRF T1-FF数据,以及仅在参考呼吸相位(对应完全呼气相位)采集的MRF T1-FF数据。白色箭头标注的区域显示,经过运动校正后,运动模糊、欠采样伪影和对比度不足的问题得到显著改善。

Fig. 6. Representative parametric FF and 𝑇 1𝐻2𝑂 maps obtained at one slice level in a healthy volunteer derived from the uncorrected and motion-corrected (MoCo) MRF T1-FFreconstructions, and from the MRF T1-FF data acquired during the reference respiratory phase only (corresponding to the full-expiration phase). White arrows emphasize regionswhere motion blurring, parameter estimation bias and streaking artifacts are significantly mitigated with the motion correction method.
图6 健康志愿者某一层面的代表性参数FF图和𝑇1𝐻2𝑂图,这些图像分别来源于未校正的MRF T1-FF重建结果、运动校正(MoCo)后的MRF T1-FF重建结果,以及仅在参考呼吸相位(对应完全呼气相位)采集的MRF T1-FF数据。白色箭头标注的区域显示,运动校正方法显著减轻了运动模糊、参数估计偏差和条状伪影问题。
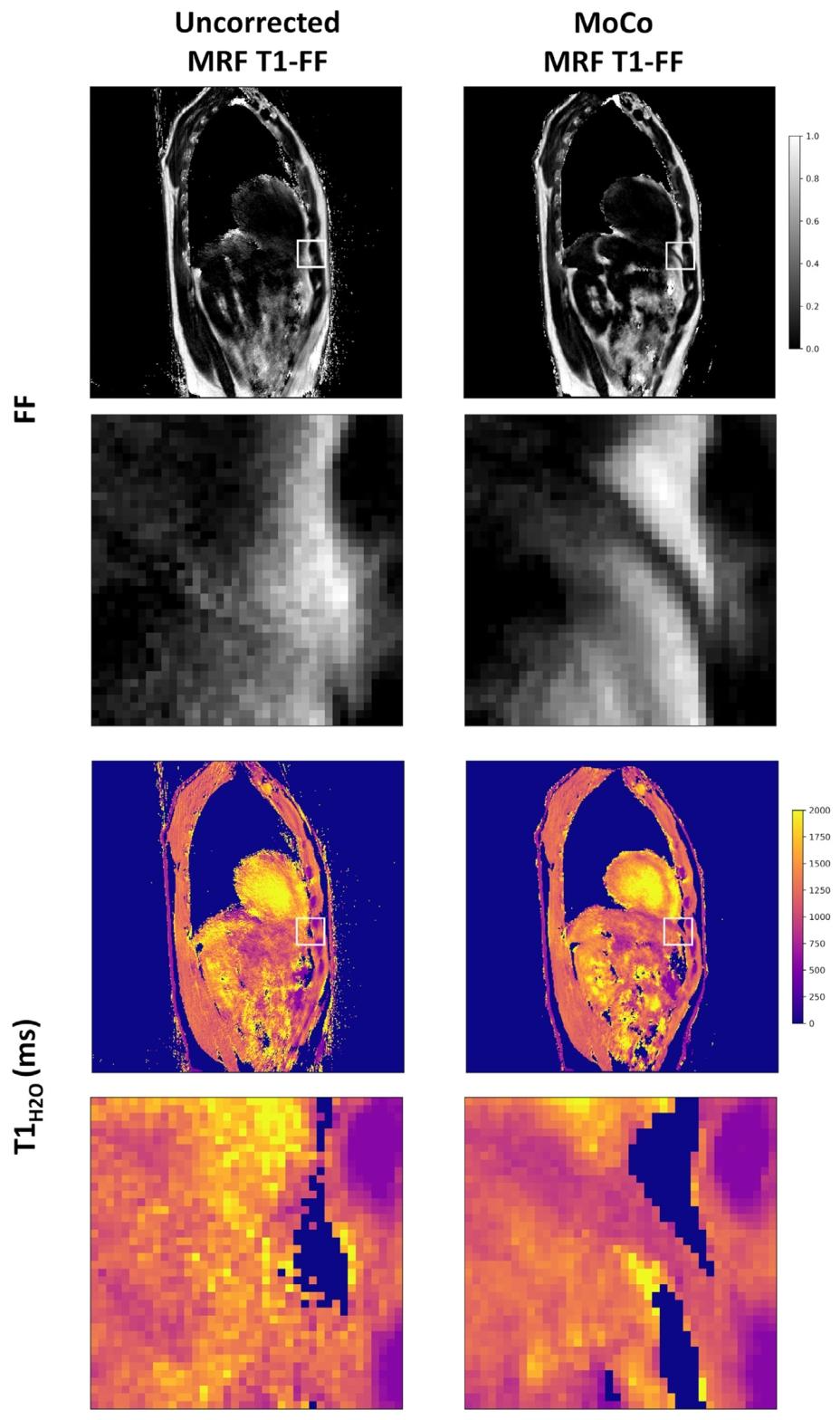
Fig. 7. Representative parametric FF and *𝑇* 1*𝐻*2*𝑂* maps obtained at one slice level in a healthy volunteer derived from both the uncorrected and motion-corrected (MoCo) MRFT1-FF reconstructions. The second and fourth rows present zoomed images corresponding to the white squares on the full images. Following motion correction, a thin layer ofmuscle is discernible on the FF and 𝑇 1𝐻2𝑂maps, corresponding to the diaphragm
图7 健康志愿者某一层面的代表性参数FF图和𝑇1𝐻2𝑂图,这些图像分别来源于未校正的MRF T1-FF重建结果和运动校正(MoCo)后的MRF T1-FF重建结果。第二行和第四行为全图中白色方框区域对应的放大图像。运动校正后,在FF图和𝑇1𝐻2𝑂图上可清晰辨别出一层薄薄的肌肉组织,该组织对应膈肌。
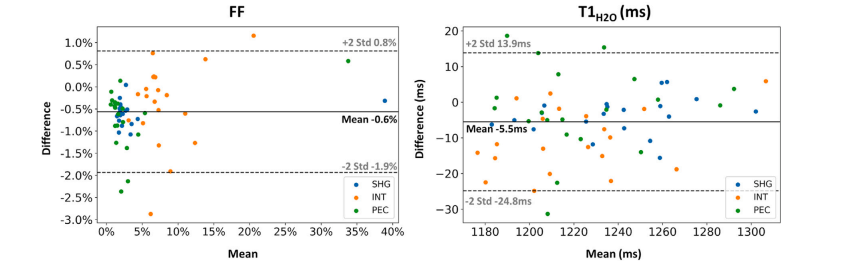
Fig. 8. Bland–Altman plot comparing the ROI-level fat fraction (FF) and water T1 (𝑇 1𝐻2𝑂) values derived from both the uncorrected and motion-corrected (MoCo) MRF T1-FFreconstruction methods in the shoulder girdle (SHG), intercostal muscles (INT), and Pectoralis major (PEC). Each data point represents an individual subject. The solid line representsthe mean difference between the values obtained with both reconstructions, while the dashed lines indicate the 95% confidence interval. Data points for FF and subject 20 withan unlabeled myopathy were excluded from this plot as the FF maps with no motion correction were highly artefacted, with fat-water swaps.
图8 Bland–Altman图比较了在肩胛带(SHG)、肋间肌(INT)和胸大肌(PEC)区域中,由未校正和运动校正(MoCo)的MRF T1-FF重建方法得到的感兴趣区(ROI)脂肪分数(FF)和水T1(𝑇1𝐻2𝑂)值。每个数据点代表一名受试者。实线表示两种重建方法所得数值之间的平均差异,虚线表示95%置信区间。由于未进行运动校正的FF图存在严重伪影(伴随脂肪-水信号互换),本图中排除了FF的相关数据点以及患有未标注肌病的20号受试者的数据。
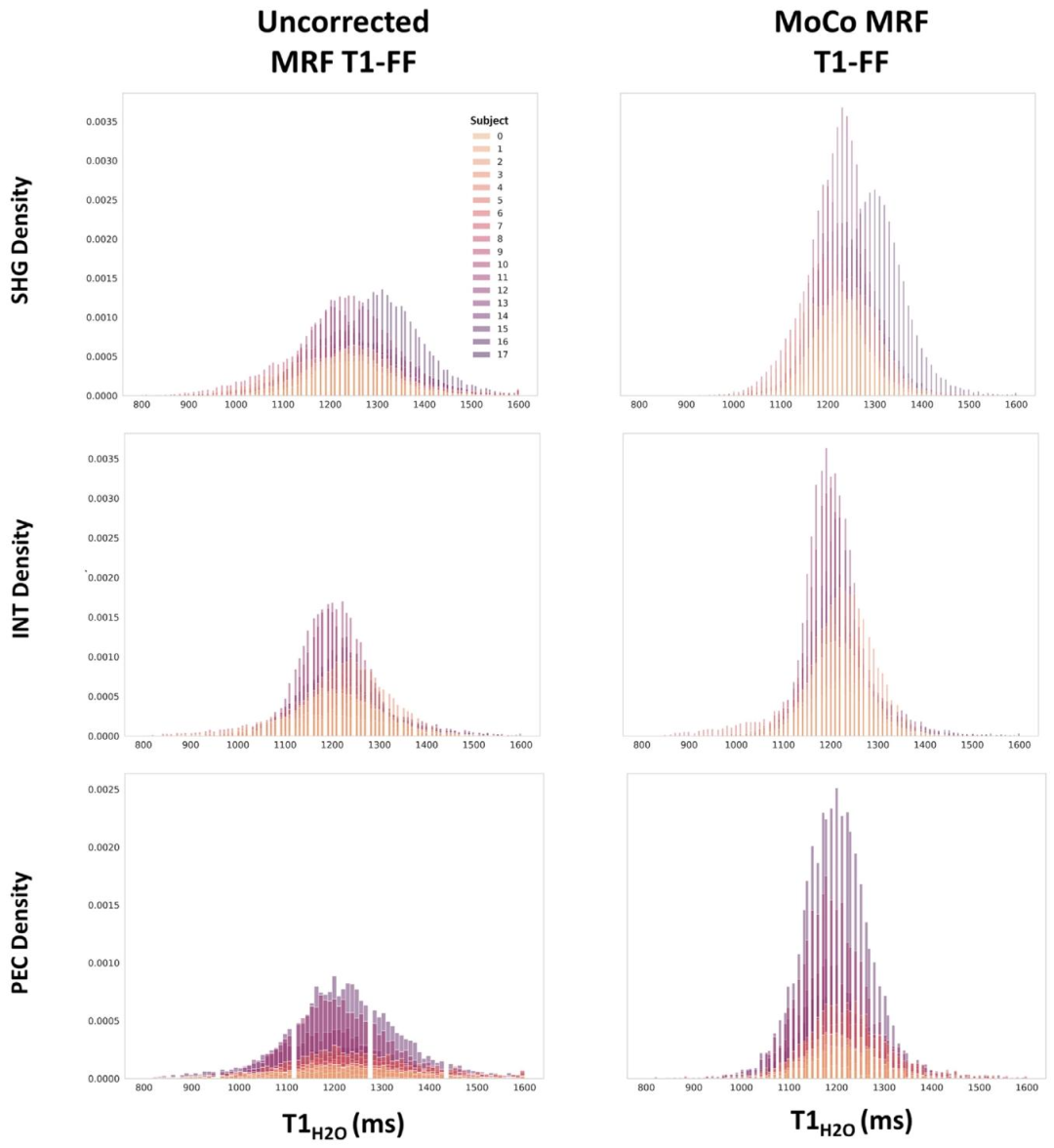
Fig. 9. Distribution of fat fraction (FF) and water T1 (𝑇 1𝐻2𝑂) values obtained in the shoulder girdle (SHG), intercostal muscles (INT), and Pectoralis major (PEC) from theuncorrected and the motion-corrected (MoCo) MRF T1-FF reconstruction. Each color represents an individual subject
图9 肩胛带(SHG)、肋间肌(INT)和胸大肌(PEC)区域中,由未校正和运动校正(MoCo)的MRF T1-FF重建方法得到的脂肪分数(FF)和水T1(𝑇1𝐻2𝑂)值的分布。不同颜色代表不同的受试者。
Table
表
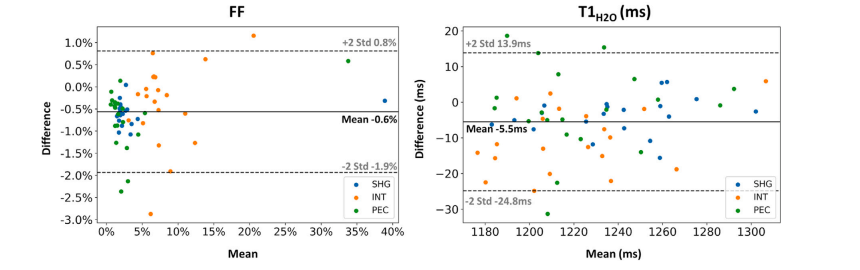
Table 1Structural similarity (SSIM) and normalized root mean square error (NRMSE) between the volumes of respiratory phases2–5 and reference respiratory phase (respiratory phase 1, corresponding to full expiration) for all subjects before andafter motion registration. Data are presented as mean ± standard deviation
表1 所有受试者在运动配准前后,呼吸相位2–5与参考呼吸相位(呼吸相位1,对应完全呼气状态)的容积之间的结构相似性(SSIM)和归一化均方根误差(NRMSE)。数据以平均值±标准差表示 。
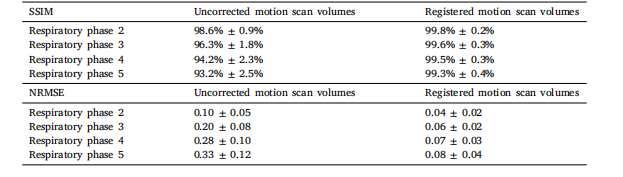
Table 2ROI-level fat fraction (FF) and water T1 (𝑇 1𝐻2𝑂) values (mean ± standard deviation) measured in the 18 healthy volunteers (Subjects 0-17) and 3subjects with DMD, IBM and unlabeled myopathy (Subjects 18-20) for the uncorrected and motion-corrected (MoCo) MRF T1-FF reconstructionsassessed in the shoulder girdle (SHG), intercostal muscles (INT), and Pectoralis major (PEC) muscles. Illustrative literature values were addedin the last row of each table section
表2 在肩胛带(SHG)、肋间肌(INT)和胸大肌(PEC)区域中,对18名健康志愿者(0-17号受试者)以及3名分别患有杜氏肌营养不良症(DMD)、包涵体肌炎(IBM)和未标注肌病的受试者(18-20号受试者),采用未校正和运动校正(MoCo)的MRF T1-FF重建方法测得的感兴趣区(ROI)脂肪分数(FF)和水T1(𝑇1𝐻2𝑂)值(平均值±标准差)。每个表格部分的最后一行添加了示例性的文献参考值。
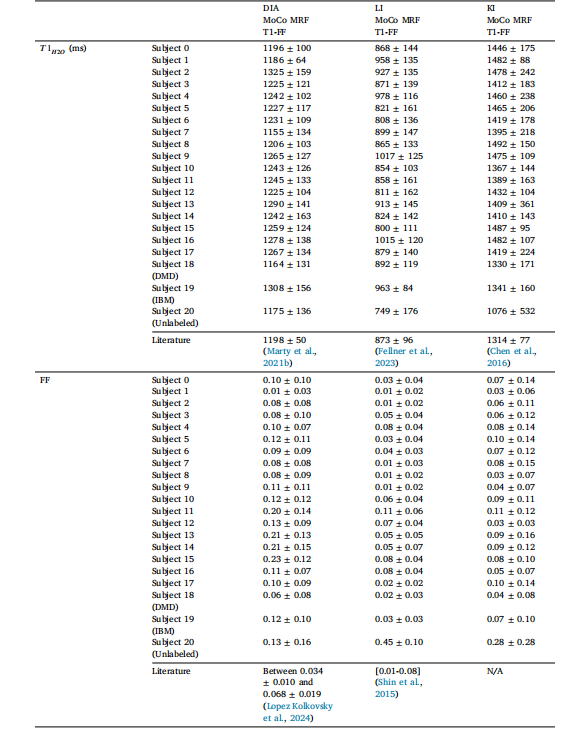
Table 3ROI-level fat fraction (FF) and water T1 (𝑇 1𝐻2𝑂) values (mean ± standard deviation) measured in the 18 healthy volunteers (Subjects 0-17) and 3subjects with DMD, IBM and unlabeled myopathy (Subjects 18-20) for the uncorrected and motion-corrected (MoCo) MRF T1-FF reconstructionsassessed in the diaphragm (DIA), kidneys (KI) and liver (LI). Illustrative literature values were added in the last row of each table section
表3 在膈肌(DIA)、肾脏(KI)和肝脏(LI)区域中,对18名健康志愿者(0-17号受试者)以及3名分别患有杜氏肌营养不良症(DMD)、包涵体肌炎(IBM)和未标注肌病的受试者(18-20号受试者),采用未校正和运动校正(MoCo)的MRF T1-FF重建方法测得的感兴趣区(ROI)脂肪分数(FF)和水T1(𝑇1𝐻2𝑂)值(平均值±标准差)。每个表格部分的最后一行添加了示例性的文献参考值。


Phantom-Data:迈向通用的主体一致性视频生成数据集)


)


)
--(C/C++))
力扣.二叉树的最大路径和牛客.主持人调度(二))
:标准IO高级操作与文件流定位实战》)




)
)

