一、摘要
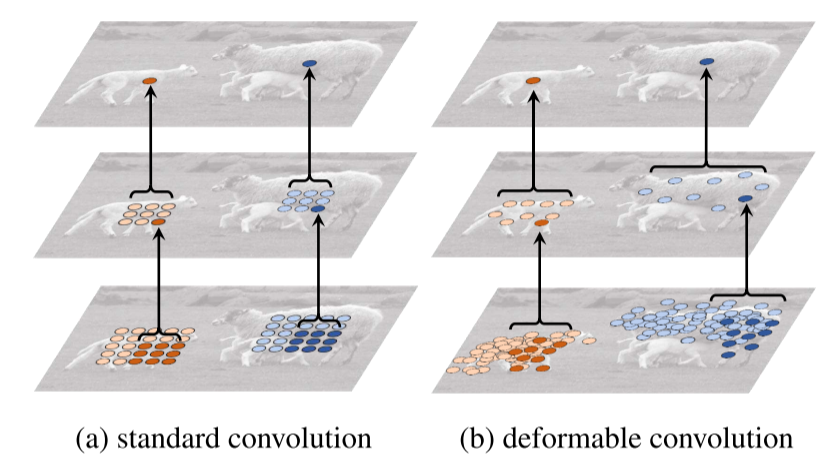
尽管卷积神经网络(CNN)在视觉识别任务上取得巨大成功,但其固有的固定几何结构(固定卷积采样网格、固定池化窗口、固定 RoI 划分)严重限制了对未知几何变换(尺度、姿态、形变、视角变化)的建模能力。
本文提出可变形卷积网络(Deformable ConvNets),通过两个轻量级模块——可变形卷积(Deformable Convolution)与可变形 RoI 池化(Deformable RoI Pooling)——在无额外监督的前提下,为卷积/池化的空间采样位置施加可学习的偏移量,使网络可自适应地、密集地、端到端地建模复杂几何变换。
实验表明,Deformable ConvNets 在 PASCAL VOC 语义分割、Cityscapes 语义分割、PASCAL VOC 与 COCO 目标检测任务上均取得显著增益:
在 ResNet-101 主干上,DeepLab VOC mIoU 从 69.7 提升到 75.2;
COCO R-FCN mAP@[0.5:0.95] 从 30.8 提升到 34.5;
仅增加 <1% 参数与 <5% 计算量。
二、先前背景
在视觉识别中,如何适应几何变化或建模物体尺度、姿态、视角和部件变形等几何变换是核心挑战。
近年来,卷积神经网络(CNNs)在图像分类、语义分割和目标检测等视觉识别任务中取得显著成功。但其几何变换建模能力主要依赖大量数据增强、大模型容量以及一些简单的手工设计模块(如用于小平移不变性的最大池化),仍存在一些缺陷。
| 类别 | 具体内容 |
|---|---|
| 传统方法 | 1. 构建具有足够所需变化的训练数据集:通过仿射变换等数据增强方式实现,虽能从数据中学习鲁棒表示,但需付出高昂训练成本和复杂模型参数的代价。 2. 手工不变特征:SIFT、HOG、ORB 等依赖先验参数化变换,难以应对复杂或非参数化形变。 |
| 基于 CNN 的方法 | AlexNet、VGG、ResNet 等通过堆叠卷积、池化获得层级特征。 但所有采样位置固定,依然依赖原始边界框的特征提取,这并非最优,尤其面对非刚性物体 |
| CNN 的局限 | 卷积核采样网格固定(如 3×3 网格),池化窗口固定(如 2×2),RoI 池化将任意形状区域强行划分为 k×k 固定 bin,无法适应物体尺度、姿态、部件形变。 |
相关的改进尝试:
| 方法名称 | 核心思想 | 与本文的差异 |
|---|---|---|
| Spatial Transformer Networks (STN) | 通过全局参数化(仿射/薄板样条)对整张特征图做一次性 warping | 全局变换,无法对不同空间位置分别建模 |
| Active Convolution | 在卷积核采样点上增加可学习偏移,但偏移量为静态参数(训练完成后固定),且所有位置共享 | 偏移量不随输入变化,缺乏内容自适应性 |
| Atrous / Dilated Convolution | 通过固定膨胀率(dilation)扩大感受野 | 采样模式人工设定 |
| Deformable Part Models (DPM) | 用部件形变建模物体(如 HOG+DPM) | 浅层模型,表达能力有限 |
| Spatial Pyramid Pooling (SPP) | 手工设计多尺度、多区域池化 | 区域划分人工设定 |
| Transformation-Invariant Features | 设计对特定变换不变的特征(如 SIFT、ORB、TI-pooling、Harmonic Networks 等) | 变换类型需先验已知 |
上述 6 类方法均试图解决 CNN 的几何不变性,但要么全局/手工/静态,要么局限于已知变换。
本文的可变形卷积/可变形 RoI 池化首次实现了局部、密集、可学习、端到端的几何建模,可直接替换现有模块,无需额外监督。
三、先前存在的问题
| 问题类别 | 具体描述 |
|---|---|
| 固定几何结构 | 卷积核采样点集合 R 始终为规则网格,无法适应局部几何变化。 |
| 全局参数化限制 | STN 仅支持全局、单一变换,无法对不同空间位置施加不同形变。 |
| 手工规则 | 空洞卷积的膨胀率需预先设定,且在所有位置共享。 |
| 非刚性对齐缺失 | RoI Pooling 将任意形状物体强行划分为 k×k 固定 bin,导致特征与部件错位。 |
| 端到端学习缺失 | 传统可变形部件模型(DPM)需启发式训练,无法与 CNN 联合优化。 |
四、本文技术
4.1 可变形卷积(Deformable Convolution)
输入:特征图
。
标准卷积
2D 卷积包含两步,一是在输入特征图 x 上使用规则网格 R 采样,二是对采样值与权重 w 加权求和。对于输出特征图 y 上的每个位置,公式为:
其中 R 为规则网格(如
定义了一个 3×3、 dilation 为 1 的核。)
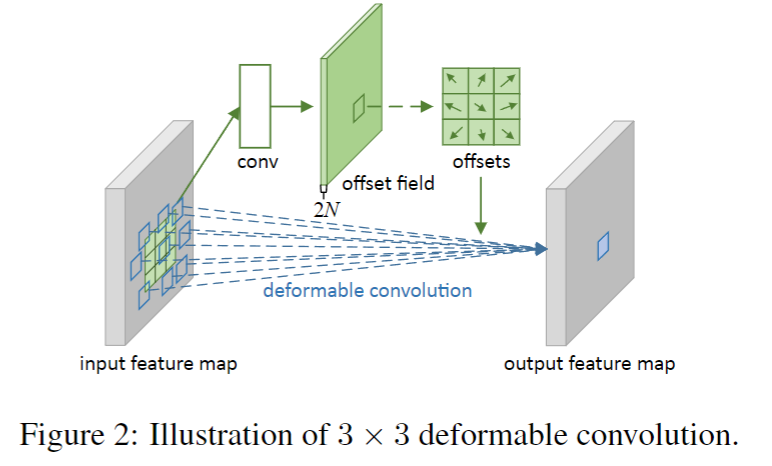
可变形卷积:
为规则网格 R 增加偏移量
,偏移量由附加卷积层生成:
分数坐标处理:由于偏移量
通常为分数,通过双线性插值实现:
其中,为任意(分数)位置(如式中的
),
枚举特征图 x 中的所有整数空间位置,
为双线性插值核,且可分离为两个一维核:
后者的本质是 “线性权重”—— 两个坐标的距离越近,权重越大。
关于偏移量获取:通过对同一输入特征图应用卷积层获得偏移量,该卷积核与当前卷积层具有相同的空间分辨率和 dilation,输出偏移场与输入特征图空间分辨率相同,通道维度为 2N(对应 N 个 2D 偏移)。
- 偏移量并非手动设计,而是通过一个额外的卷积层从输入特征图中学习得到(对应图 2 中 “conv offset field” 模块)。
- 这个用于生成偏移量的卷积核,与当前可变形卷积层的卷积核具有相同的空间分辨率(如 3×3)和 dilation 系数(如 dilation=1)。例如,若当前可变形卷积使用 3×3 kernel、dilation=1,则生成偏移量的卷积层也采用 3×3 kernel、dilation=1。
- 这一设计确保偏移量的学习与特征提取的 “感受野范围” 匹配,使偏移量能精准捕捉局部几何变形。
关于枚举q:实际上,为了提高计算效率,q枚举的通常仅仅是其整数邻域的空间位置,而不是所有整数空间位置。例如,假设在输入特征图上,需要计算非整数位置
的特征值
:
- 确定周围 4 个整数点:
、
、
、
。
- 计算 x 方向权重:
;
。
- 计算 y 方向权重:
;
。
- 计算二维权重:
;
;
;
。
- 最终插值结果:
4.2 可变形 RoI 池化(Deformable RoI Pooling)
输入:特征图
、RoI 参数
。
标准 RoI 池化
为第
个 bin 在输入特征图 x 上对应的像素集合
对于第和
。
P₀ 是 RoI 的左上角坐标(原点在特征图左上角)。
p 是相对坐标,表示在 RoI 内部的位置(从
(0, 0)到(w-1, h-1))。为 bin 中的像素数量。
RoI 池化将其分为
个 bin,输出
假设:RoI 宽
w=5,高h=3,划分为2×2bins。则:Bin(0,0) 的 x 范围:
[0, 2),y 范围:[0, 1)。Bin(1,1) 的 x 范围:
[2, 5),y 范围:[1, 3)。
可变形 RoI 池化
先通过标准 RoI 池化,把任意 RoI 变成
- 把
个归一化偏移
(2代表x和y);
- 将归一化偏移映射到实际像素偏移:
,
- 每个 bin 的位置平移
后,用双线性插值取像素值,再做平均池化得到 y(i, j)。
4.3 位置敏感可变形 RoI 池化(Deformable PS RoI pooling)
标准 PS RoI 池化
目的:把任意 RoI 变成固定
基本步骤:
用 1×1 卷积 把特征图变成
张 位置敏感得分图
对 每个 bin(i,j),只在 对应的那张得分图 X_{i,j,c} 上做 平均池化,得到该 bin 的值。
- 可变形 PS RoI 池化
- 基本步骤:
- 用 1×1 卷积 把特征图变成
- 使用全卷积生成全分辨率偏移场,如使用
卷积会变成
从偏移场提取 RoI 对应的 归一化偏移
还原实际偏移并采样
- 用 1×1 卷积 把特征图变成
- 基本步骤:
可变形PS Rol池化与可变形 RoI 池化类似,但输入替换为特定的位置敏感得分图
。偏移学习遵循全卷积思想,通过卷积层生成全空间分辨率偏移场,对每个 RoI(及每个类别)应用 PS RoI 池化获得归一化偏移,再转换为实际偏移。
简单说,可变形 PS RoI Pooling =
“先全卷积生成 k²(C+1) 张位置敏感得分图 + 2k²(C+1) 张全图偏移场,再用 PS Pooling 把每个 RoI 对应的偏移裁剪出来,还原后做可变形采样”,
既保留 位置敏感 又实现 部件级自适应对齐,全程 全卷积,无需逐 RoI 跑 fc。
4.4 可变形卷积网络构建
可变形卷积和 RoI 池化模块与对应普通版本的输入输出相同,可直接替换。训练时,用于偏移学习的新增卷积和全连接层初始化为零权重,学习率设为现有层的 β 倍(默认 β=1,Faster R-CNN 中的全连接层 β=0.01),通过上述插值操作的反向传播进行训练,形成可变形卷积网络(deformable ConvNets)。
在特征提取方面,采用 ResNet-101 和改进的 Aligned-Inception-ResNet 架构,移除平均池化和全连接层,添加 1×1 卷积降低通道维度至 1024,调整最后卷积块的步长和 dilation 以提高特征图分辨率,并在最后几个卷积层( kernel size>1)应用可变形卷积(实验发现 3 层为不同任务的良好权衡)。
在分割和检测网络方面,基于特征提取网络的输出特征图构建任务特定网络,如 DeepLab 用于语义分割,Category-Aware RPN、Faster R-CNN 和 R-FCN 用于目标检测,且 Faster R-CNN 和 R-FCN 中的 RoI 池化层可替换为可变形 RoI 池化。
五、创新点
| 创新维度 | 具体贡献 |
|---|---|
| 可变形卷积 | 首次在卷积内部引入逐位置可学习的偏移量,实现局部、密集、内容自适应的几何变换建模,且端到端训练。 |
| 可变形 RoI 池化 | 首次在 RoI 池化中引入逐 bin 可学习的偏移量,实现部件级自适应对齐,显著提升非刚性物体检测。 |
| 轻量级 | 仅增加 2N 个通道(卷积)或 2k² 个通道(PS RoI),参数增量 <1%,计算量增量 <5%。 |
| 通用性 | 可直接替换现有 CNN 中的标准卷积/RoI 池化,无需改动网络整体结构。 |
| 首次验证 | 首次在密集预测任务(语义分割、目标检测)上验证可学习密集几何变换的有效性。 |
六、本文技术的潜在问题
| 问题类别 | 具体描述 |
|---|---|
偏移量学习 稳定性 | 偏移量初始化为 0,若学习率设置不当,可能导致训练初期梯度消失或爆炸。 |
| 计算开销 | 虽然整体开销小,但在极端大分辨率输入(如 4K)下,2N 额外通道仍会带来显存压力。 |
| 可解释性 | 偏移量分布缺乏显式约束,可能学习到不符合物理意义的采样模式(如采样到图像外)。 |
| 任务依赖性 | 偏移量完全由目标任务驱动,对新任务或跨域场景可能需重新训练。 |
| 稀疏监督风险 | 在目标检测中,若标注框质量差,偏移量可能学到噪声,导致性能下降。 |
| 小目标和细节处理能力有限 | 虽然可变形卷积能自适应调整感受野,但在处理小目标或精细结构时,偏移量的学习可能受限于特征图分辨率和感受野大小,导致定位精度不足。 |
七、未来可改善的方向
| 方向类别 | 具体建议 |
|---|---|
| 增强对小目标和细节的处理 | 结合特征金字塔网络等技术,提高小目标和精细结构区域的特征图分辨率;设计针对小目标的专用可变形卷积模块,调整感受野大小和偏移量学习策略,提升定位精度。 |
| 跨域泛化 | 引入元学习或域自适应,使偏移量快速适应新任务或新场景。 |
| 结构搜索 | 用 NAS(Neural Architecture Search)自动搜索最佳偏移量生成网络结构。 |
| 多模态融合 | 将偏移量与深度、光流、边缘等额外模态联合学习,提升几何建模能力。 |
| 更大尺度 | 将可变形思想扩展到 3D 卷积、Transformer 自注意力机制,处理视频或点云。 |



)

)

)





)



—— 数据结构的基本概念)

