Intel RealSense D455深度相机安装过程遇到过一些报错,所以记录一下安装过程!!!以后方便回顾。
1.安装最新的IntelRealSense SDK2.0
(1) 注册服务器的公钥
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE(2) 将服务器添加到存储库列表中
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u(3) 安装SDK2
安装依赖:
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils如果安装realsense-ros,还需以下依赖:
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg2.测试相机的连接
(1)查看设备号
将深度相机连接到电脑,终端输入:
ls /dev/video*(2)启动realsense-viewer
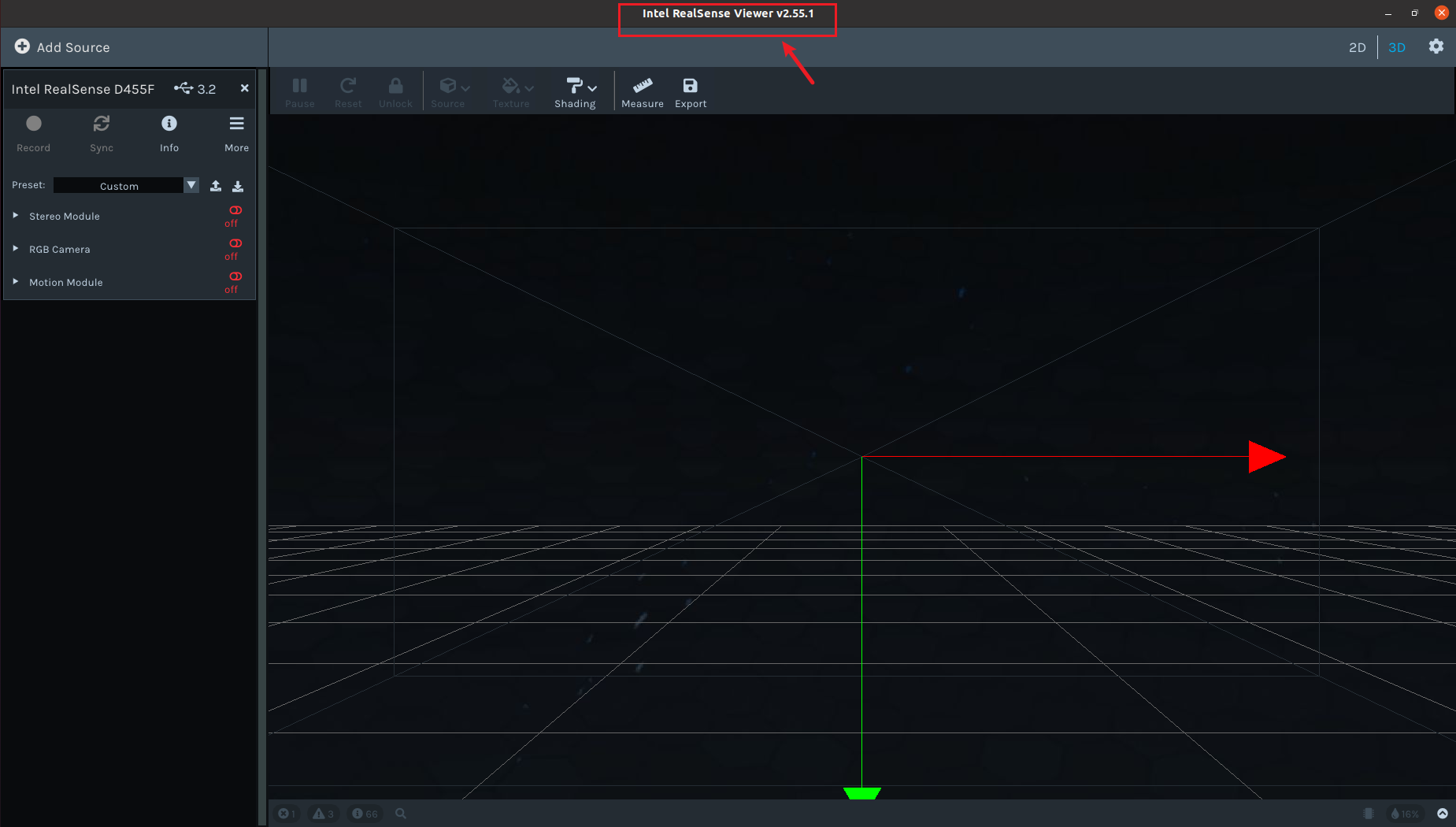
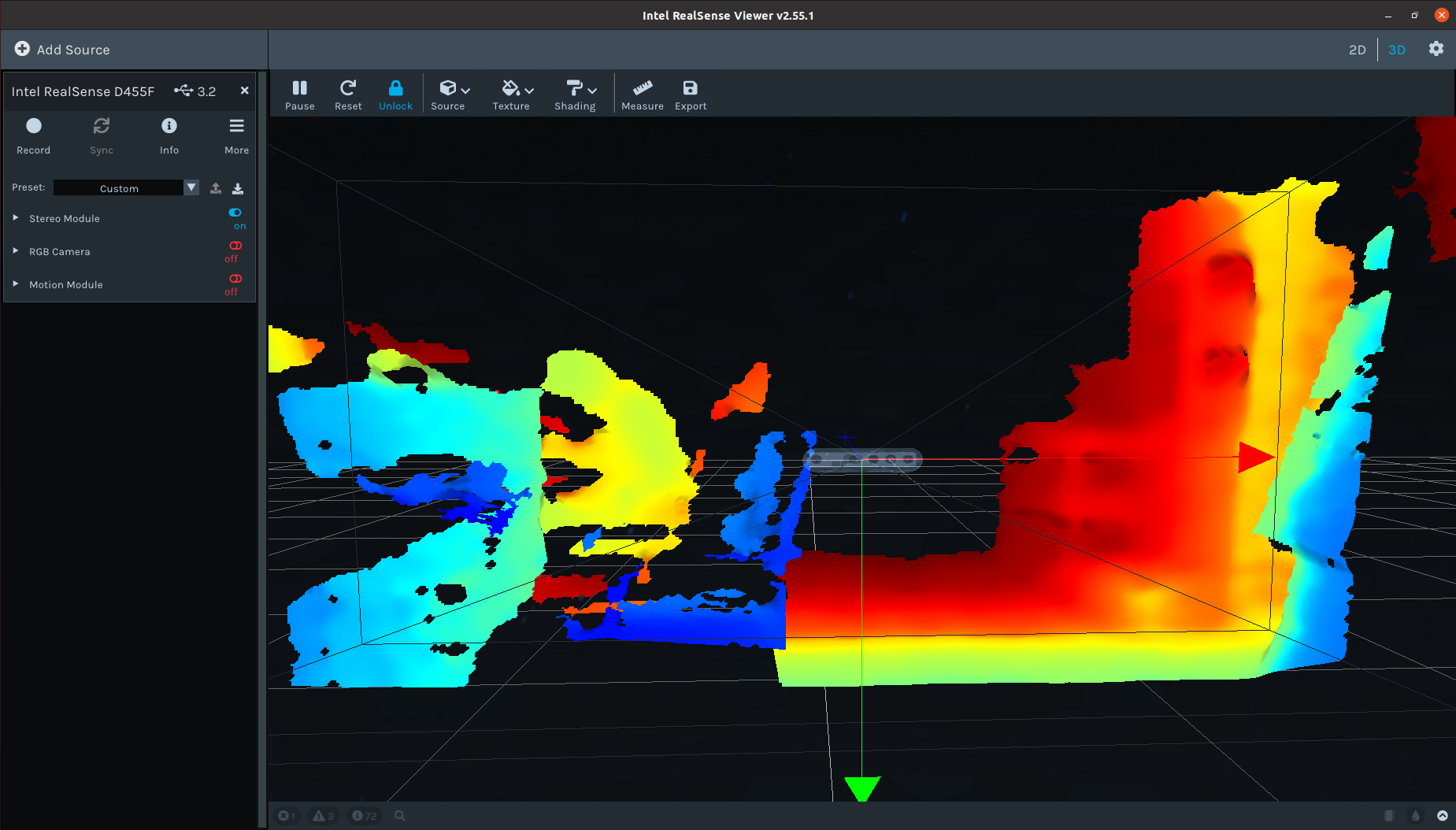
D455相机需要USB3.0及以上接口,才能正常的传输数据,终端输入,读取相机的数据:
realsense-viewer连接成功的效果如下:
3.安装realsense-ros驱动
(1)创建工作空间
mkdir -p d455_ws/src
cd d455_ws/src(2)下载realsense-ros
git clone https://github.com/IntelRealSense/realsense-ros.git(3)将当前分支切换到最新版本
cd realsense-ros/git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`cd ..(4)安装依赖
sudo apt-get install ros-noetic-ddynamic-reconfigure(5)编译运行
cd /d455_ws
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release但这一步编译一直报错:
CMake Warning at realsense-ros/realsense2_camera/CMakeLists.txt:44 (find_package):Found package configuration file:/usr/lib/x86_64-linux-gnu/cmake/realsense2/realsense2Config.cmakebut it set realsense2_FOUND to FALSE so package "realsense2" is consideredto be NOT FOUND. Reason given by package:The following imported targets are referenced, but are missing: fastcdrfastrtps
CMake Error at realsense-ros/realsense2_camera/CMakeLists.txt:48 (message):Intel RealSense SDK 2.0 is missing, please install it from https://github.com/IntelRealSense/librealsense/releases-- Configuring incomplete, errors occurred!
See also "/home/mjc/d455_ws/build/CMakeFiles/CMakeOutput.log".
Invoking "cmake" failed
网上查了很多原因,截至2025.9.12,只有这个办法适合我,那就是降级安装:
https://github.com/IntelRealSense/librealsense/issues/14158
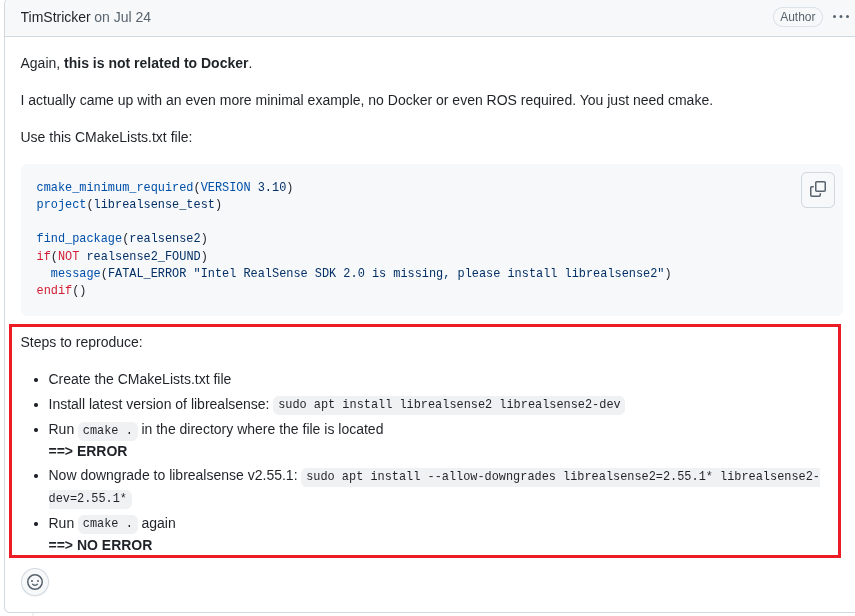
报错解决:
1. 降级到 RealSense v2.55.1
# 1.降级安装
sudo apt install --allow-downgrades librealsense2=2.55.1* librealsense2-dev=2.55.1*# 2.同时安装其他相关包的对应版本
sudo apt install --allow-downgrades librealsense2-dkms=1.3.* librealsense2-utils=2.55.1*# 3.安装缺失的依赖包
sudo apt install --allow-downgrades librealsense2-gl=2.55.1*# 4.再安装 utils
sudo apt install --allow-downgrades librealsense2-utils=2.55.1*2. 验证降级是否成功
# 3.验证降级是否成功
pkg-config --modversion realsense2 # 应该显示 2.55.1
# 或者重新打开 realsense-viewer 查看版本
realsense-viewer3. 清理并重新编译
cd ~/d455_ws
rm -rf build/ devel/
source /opt/ros/noetic/setup.bash
catkin_make4.如果想要锁定版本(防止自动升级)
sudo apt-mark hold librealsense2 librealsense2-dev librealsense2-utils librealsense2-dkms!!!更新:9.15号,似乎已经解决了这个错误,但我还没有尝试:
https://github.com/IntelRealSense/realsense-ros/issues/3406
(6)成功编译后,安装到本机
catkin_make install4.启动深度相机
4.1 启动RGB-D相机
(1)先安装ros软件包rgbd_launch
sudo apt install ros-noetic-rgbd-launch(2)启动相机
cd d455_ws
source ./devel/setup.bash
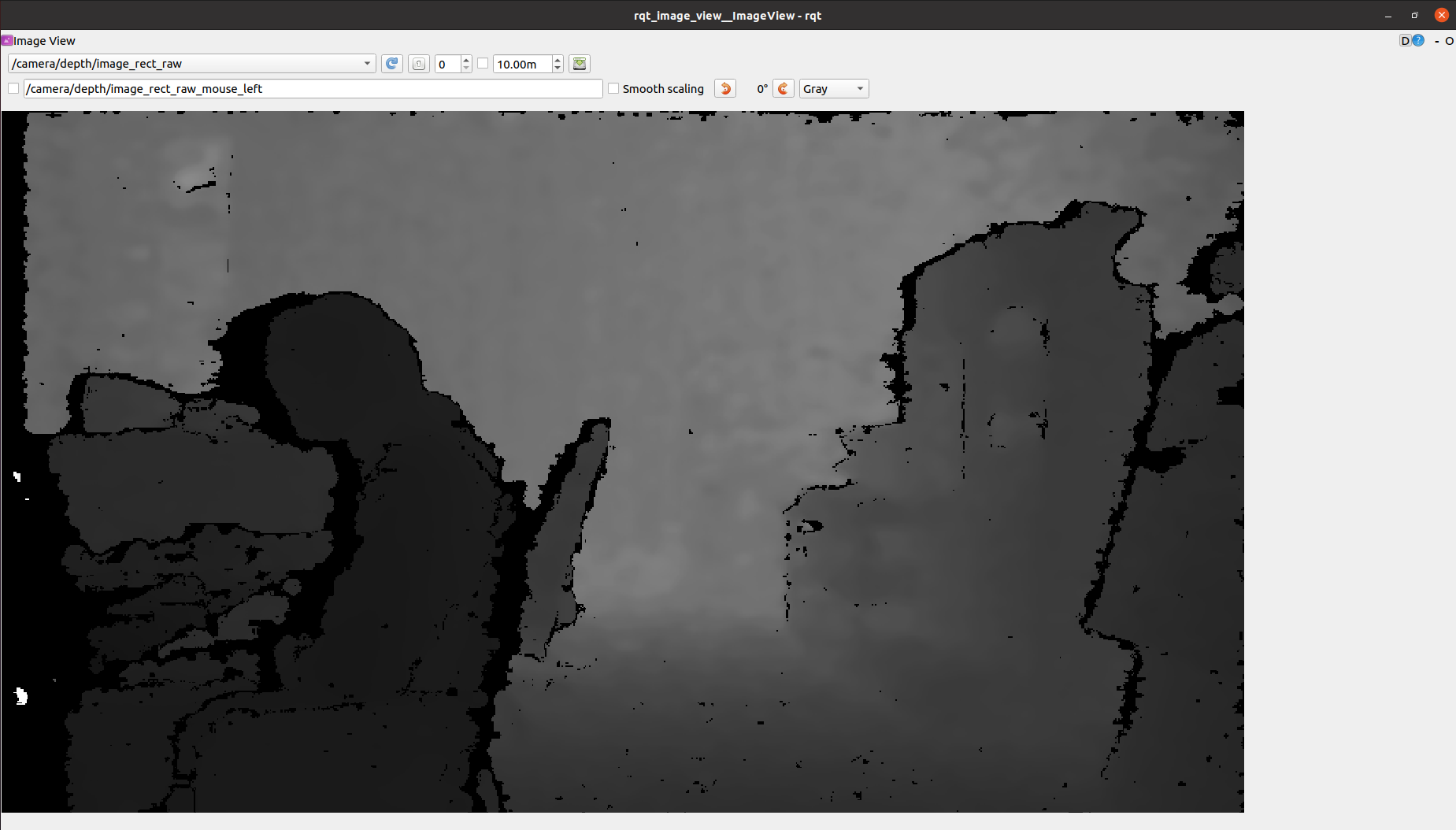
roslaunch realsense2_camera rs_rgbd.launch4.2 可视化相机数据
rosrun rqt_image_view rqt_image_view选择topic,连接成功画面如图所示:
参考资料:
https://jishuzhan.net/article/1790726978593099778
https://blog.csdn.net/weixin_50508111/article/details/124566566
http://www.chinasem.cn/article/826052
https://blog.csdn.net/weixin_50508111/article/details/125422880





:计数排序)

;初识类的默认成员函数)

)


![【AI开发】【前后端全栈】[特殊字符] AI 时代的快速开发思维](http://pic.xiahunao.cn/【AI开发】【前后端全栈】[特殊字符] AI 时代的快速开发思维)
—PyTorch使用—张量的创建和类型转换】)





