在C++算法与数据结构领域,前缀和是一种时间复杂度优化利器,尤其适用于频繁查询数组区间和的场景。它通过预先计算“前缀累积和”,将原本O(n)时间的区间和查询压缩至O(1),是面试、竞赛及工程开发中高频使用的基础技巧。
一、前缀和的核心原理
1.1 定义:什么是前缀和?
前缀和(Prefix Sum)本质是一个辅助数组,其中每个元素的值等于原数组从“起始位置”到“当前位置”的所有元素之和。对于一维数组,我们通常将前缀和数组定义为pre,其数学表达式如下:
设原数组为a[1...n](注:实际开发中常将数组下标从1开始,避免处理边界0时的逻辑判断),前缀和数组pre[0...n]的定义为:
pre[0] = 0(哨兵位,用于简化计算)pre[i] = a[1] + a[2] + ... + a[i](即前i个元素的累积和)
例如,原数组a = [1, 2, 3, 4, 5],其前缀和数组pre计算过程如下:
pre[0] = 0(哨兵)pre[1] = a[1] = 1pre[2] = a[1] + a[2] = 1 + 2 = 3pre[3] = a[1] + a[2] + a[3] = 1 + 2 + 3 = 6pre[4] = 1 + 2 + 3 + 4 = 10pre[5] = 1 + 2 + 3 + 4 + 5 = 15
最终pre = [0, 1, 3, 6, 10, 15]。
1.2 核心价值:区间和的O(1)查询
前缀和的核心作用是快速计算原数组任意区间[l, r]的和。根据前缀和的定义,区间和sum(l, r)(即a[l] + a[l+1] + ... + a[r])可通过前缀和数组推导得出:
sum(l, r) = pre[r] - pre[l-1]
推导过程:
pre[r] = a[1] + a[2] + ... + a[l-1] + a[l] + ... + a[r]pre[l-1] = a[1] + a[2] + ... + a[l-1]- 两者相减后,前
l-1个元素的和被抵消,剩余部分恰好是a[l]到a[r]的和。
以上述a = [1,2,3,4,5]为例,若查询区间[2,4](即2+3+4=9):
pre[4] = 10,pre[1] = 1sum(2,4) = pre[4] - pre[1] = 10 - 1 = 9,结果完全正确。
1.3 时间与空间复杂度分析
前缀和的优势体现在“预处理+多次查询”的场景中,其复杂度如下:
- 预处理阶段:遍历原数组一次,计算前缀和数组,时间复杂度为
O(n)(n为原数组长度); - 查询阶段:每次查询仅需一次减法运算,时间复杂度为
O(1),无论查询多少次,总查询时间仅为O(q)(q为查询次数); - 空间复杂度:需额外存储长度为
n+1的前缀和数组,空间复杂度为O(n)(可优化为原地存储,见下文“优化技巧”)。
对比“暴力查询”(每次查询遍历区间[l, r],时间复杂度O(n*q)),当查询次数q较大时(如q>1000),前缀和的效率优势会呈指数级放大。
二、一维前缀和的C++实现
一维前缀和是基础,其实现流程分为“预处理前缀和数组”和“处理区间查询”两步,以下通过完整代码示例讲解。
2.1 基础实现(下标从1开始)
下标从1开始是最常用的方式,通过pre[0] = 0的哨兵位,避免处理l=1时l-1=0的边界判断错误。
#include <iostream>
#include <vector>
using namespace std;int main() {// 1. 输入原数组(长度n)int n, q; // n:原数组长度,q:查询次数cin >> n >> q;vector<int> a(n + 1); // 原数组:a[1]~a[n]for (int i = 1; i <= n; ++i) {cin >> a[i];}// 2. 预处理前缀和数组prevector<int> pre(n + 1, 0); // pre[0] = 0,pre[1]~pre[n]为前缀和for (int i = 1; i <= n; ++i) {pre[i] = pre[i - 1] + a[i]; // 递推公式:当前前缀和 = 前一个前缀和 + 原数组当前元素}// 3. 处理q次区间查询while (q--) {int l, r; // 查询区间[l, r]cin >> l >> r;// 计算区间和并输出int sum = pre[r] - pre[l - 1];cout << "区间[" << l << "," << r << "]的和为:" << sum << endl;}return 0;
}
输入输出示例:
输入:
5 3 // 原数组长度5,查询3次
1 2 3 4 5 // 原数组a[1]~a[5]
1 3 // 查询[1,3]
2 4 // 查询[2,4]
3 5 // 查询[3,5]输出:
区间[1,3]的和为:6
区间[2,4]的和为:9
区间[3,5]的和为:12
2.2 优化技巧:原地存储前缀和
若原数组后续无需使用,可直接在原数组上存储前缀和,省去额外的pre数组,将空间复杂度从O(n)优化为O(1)(不考虑输入数组本身的空间)。
实现代码如下:
#include <iostream>
#include <vector>
using namespace std;int main() {int n, q;cin >> n >> q;vector<int> a(n + 1); // 原数组与前缀和数组共用for (int i = 1; i <= n; ++i) {cin >> a[i];a[i] += a[i - 1]; // 原地更新:a[i]变为前i个元素的前缀和}while (q--) {int l, r;cin >> l >> r;cout << a[r] - a[l - 1] << endl;}return 0;
}
注意事项:
- 此优化仅适用于“原数组无需保留”的场景(如仅需查询区间和,后续不操作原数组);
- 若原数组需后续使用(如修改元素后重新计算前缀和),则不可使用原地存储。
2.3 边界问题处理
前缀和的边界错误是新手常见问题,需重点关注以下两点:
- 下标从0开始的情况:若原数组下标从0开始(如
a[0]~a[n-1]),前缀和数组pre[0] = 0,pre[i] = a[0] + ... + a[i-1],此时区间[l, r](0-based)的和为pre[r+1] - pre[l]。示例代码如下:vector<int> a = {1,2,3,4,5}; int n = a.size(); vector<int> pre(n + 1, 0); for (int i = 1; i <= n; ++i) {pre[i] = pre[i-1] + a[i-1]; // a[i-1]是原数组第i个元素 } // 查询区间[1,3](0-based,即2+3+4) int l = 1, r = 3; int sum = pre[r+1] - pre[l]; // pre[4]-pre[1] = 10-1=9 - 数据溢出问题:若原数组元素为int类型且数值较大(如
a[i]为1e9,n为1e5),前缀和可能超过int的最大值(2^31-1 ≈ 2e9),此时需将前缀和数组类型改为long long。示例:vector<long long> pre(n + 1, 0); // 用long long避免溢出 for (int i = 1; i <= n; ++i) {pre[i] = pre[i-1] + a[i]; // a[i]若为int,会自动提升为long long }
三、二维前缀和:处理矩阵区间和
一维前缀和的思想可扩展到二维场景,用于快速计算矩阵中任意子矩阵的元素和(如查询(x1,y1)到(x2,y2)构成的子矩阵和),是图像处理、矩阵分析等领域的常用技巧。
3.1 二维前缀和的定义与推导
设原矩阵为a[1...n][1...m](下标从1开始),二维前缀和数组pre[0...n][0...m]的定义为:
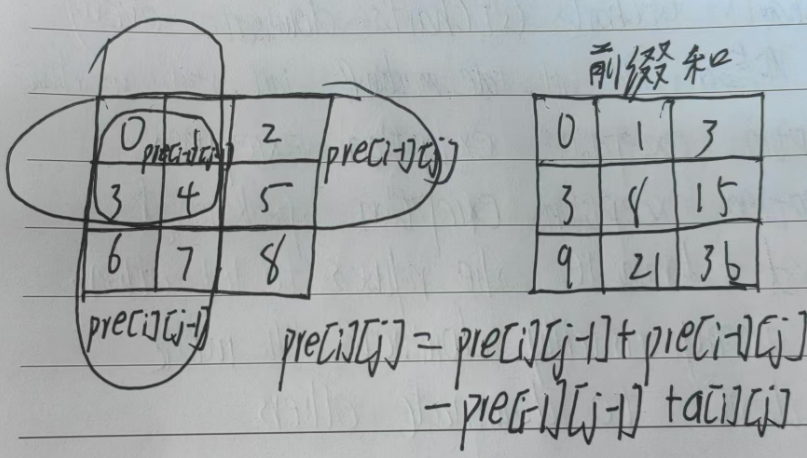
pre[i][j]表示以(1,1)为左上角、(i,j)为右下角的子矩阵的所有元素之和。
递推公式推导:
要计算pre[i][j],需考虑以下四部分:
- 左上角子矩阵
(1,1)-(i-1,j-1)的和:pre[i-1][j-1]; - 左边子矩阵
(1,j)-(i-1,j)的和:pre[i-1][j] - pre[i-1][j-1]; - 上边子矩阵
(i,1)-(i,j-1)的和:pre[i][j-1] - pre[i-1][j-1]; - 当前元素
a[i][j]。
合并后得到递推公式:
pre[i][j] = pre[i-1][j] + pre[i][j-1] - pre[i-1][j-1] + a[i][j]
子矩阵和计算:
对于任意子矩阵(x1,y1)-(x2,y2)(左上角为(x1,y1),右下角为(x2,y2)),其和sum的公式为:
sum = pre[x2][y2] - pre[x1-1][y2] - pre[x2][y1-1] + pre[x1-1][y1-1]
推导逻辑:用pre[x2][y2](大矩阵和)减去“上方无关区域”(pre[x1-1][y2])和“左方无关区域”(pre[x2][y1-1]),但此时“左上角重叠区域”(pre[x1-1][y1-1])被多减了一次,需加回。
3.2 二维前缀和的C++实现
以下代码实现“输入一个n行m列的矩阵,处理q次子矩阵和查询”:
#include <iostream>
#include <vector>
using namespace std;int main() {int n, m, q; // n:行数,m:列数,q:查询次数cin >> n >> m >> q;// 1. 输入原矩阵(下标1开始)vector<vector<int>> a(n + 1, vector<int>(m + 1));for (int i = 1; i <= n; ++i) {for (int j = 1; j <= m; ++j) {cin >> a[i][j];}}// 2. 预处理二维前缀和数组vector<vector<long long>> pre(n + 1, vector<long long>(m + 1, 0));for (int i = 1; i <= n; ++i) {for (int j = 1; j <= m; ++j) {pre[i][j] = pre[i-1][j] + pre[i][j-1] - pre[i-1][j-1] + a[i][j];}}// 3. 处理q次查询while (q--) {int x1, y1, x2, y2; // 子矩阵的左上角(x1,y1)和右下角(x2,y2)cin >> x1 >> y1 >> x2 >> y2;// 计算子矩阵和long long sum = pre[x2][y2] - pre[x1-1][y2] - pre[x2][y1-1] + pre[x1-1][y1-1];cout << "子矩阵(" << x1 << "," << y1 << ")-(" << x2 << "," << y2 << ")的和为:" << sum << endl;}return 0;
}
输入输出示例:
输入:
3 3 2 // 3行3列矩阵,2次查询
1 2 3 // 第1行
4 5 6 // 第2行
7 8 9 // 第3行
1 1 2 2 // 查询子矩阵(1,1)-(2,2)(1+2+4+5=12)
2 3 3 3 // 查询子矩阵(2,3)-(3,3)(6+9=15)输出:
子矩阵(1,1)-(2,2)的和为:12
子矩阵(2,3)-(3,3)的和为:15
四、前缀和的实战应用场景
前缀和并非孤立的技巧,而是许多复杂算法的基础组件,以下列举典型应用场景。
4.1 场景1:统计区间和等于k的子数组个数
问题描述:给定一个整数数组a和整数k,统计所有和为k的连续子数组的个数(LeetCode 560. Subarray Sum Equals K)。
前缀和思路:
- 设前缀和数组为
pre,则子数组[i+1, j]的和为pre[j] - pre[i]; - 若
pre[j] - pre[i] = k,则pre[i] = pre[j] - k; - 遍历数组时,用哈希表(
unordered_map)存储每个pre[i]出现的次数,对于当前pre[j],查询哈希表中pre[j]-k的出现次数,累加至结果。
C++实现代码:
#include <iostream>
#include <vector>
#include <unordered_map>
using namespace std;int subarraySum(vector<int>& nums, int k) {unordered_map<long long, int> preCount; // key:前缀和,value:出现次数preCount[0] = 1; // 初始化:pre[0] = 0出现1次long long pre = 0; // 当前前缀和int res = 0;for (int num : nums) {pre += num; // 更新当前前缀和// 若pre - k存在,说明有pre[i] = pre[j] - k,对应子数组和为kif (preCount.find(pre - k) != preCount.end()) {res += preCount[pre - k];}preCount[pre]++; // 记录当前前缀和的出现次数}return res;
}int main() {vector<int> nums = {1, 1, 1};int k = 2;cout << "和为" << k << "的子数组个数:" << subarraySum(nums, k) << endl; // 输出2return 0;
}
复杂度分析:时间复杂度O(n)(遍历数组一次,哈希表查询/插入为O(1)),空间复杂度O(n)(哈希表存储前缀和)。
4.2 场景2:二维矩阵中的最大子矩阵和
问题描述:给定一个二维整数矩阵,找到一个子矩阵,使其元素和最大(类似“二维版最大子数组和”)。
前缀和思路:
- 用二维前缀和预处理矩阵,将任意子矩阵和的计算降为
O(1); - 固定子矩阵的“上下边界”(如固定第i行到第j行),将每列的和压缩为一个“一维数组”(列和数组);
- 对列和数组求“最大子数组和”(Kadane算法),即为“上下边界为i~j”时的最大子矩阵和;
- 遍历所有可能的上下边界,取最大值即为最终结果。
核心优势:将二维问题转化为一维问题,时间复杂度从O(n^2m^2)(暴力枚举所有子矩阵)优化为O(n^2m)(n为行数,m为列数)。
4.3 场景3:前缀和与差分的结合
前缀和与差分是“逆运算”关系:差分数组的前缀和是原数组,原数组的前缀和是“二次前缀和”。两者结合可高效解决“多次区间更新+区间查询”的问题(如LeetCode 1109. Corporate Flight Bookings)。
例如,若需对数组a的[l, r]区间每次加val(共q次更新),最后查询[x, y]的和:
- 用差分数组
diff处理区间更新(diff[l] += val,diff[r+1] -= val),更新时间O(1); - 对
diff求前缀和得到更新后的a数组,时间O(n); - 对
a求前缀和,查询[x, y]的和,时间O(1)。
总时间复杂度O(n + q),远优于暴力更新的O(q*n)。
五、总结与常见误区
5.1 前缀和的核心优势
- 时间优化:将多次区间和查询的时间从
O(n*q)降至O(n + q),是“以空间换时间”的经典案例; - 通用性强:可扩展到二维、三维场景,且能与哈希表、Kadane算法等结合解决复杂问题;
- 实现简单:核心逻辑仅需几行代码,易于理解和调试。
5.2 常见误区与避坑指南
- 下标混淆:务必明确原数组和前缀和数组的下标起始位置(0-based或1-based),避免查询时出现
l-1越界; - 数据溢出:当原数组元素较大或长度较长时,前缀和需用
long long类型(尤其二维前缀和,矩阵元素和更容易溢出); - 空间浪费:若原数组无需保留,可使用“原地前缀和”优化空间;
- 不适用于动态修改:前缀和仅适用于“静态数组”(元素不修改),若需频繁修改元素并查询区间和,应使用线段树或树状数组。
![[n8n] 全文检索(FTS)集成 | Mermaid图表生成](http://pic.xiahunao.cn/[n8n] 全文检索(FTS)集成 | Mermaid图表生成)


![[新启航]白光干涉仪在微透镜阵列微观 3D 轮廓测量中的应用解析](http://pic.xiahunao.cn/[新启航]白光干涉仪在微透镜阵列微观 3D 轮廓测量中的应用解析)
- Mediatek KMS实现mtk_drm_drv.c(Part.2))
)





)

)
Leetcode34. 在排序数组中查找元素的第一个和最后一个位置+74. 搜索二维矩阵)




)