看我的git
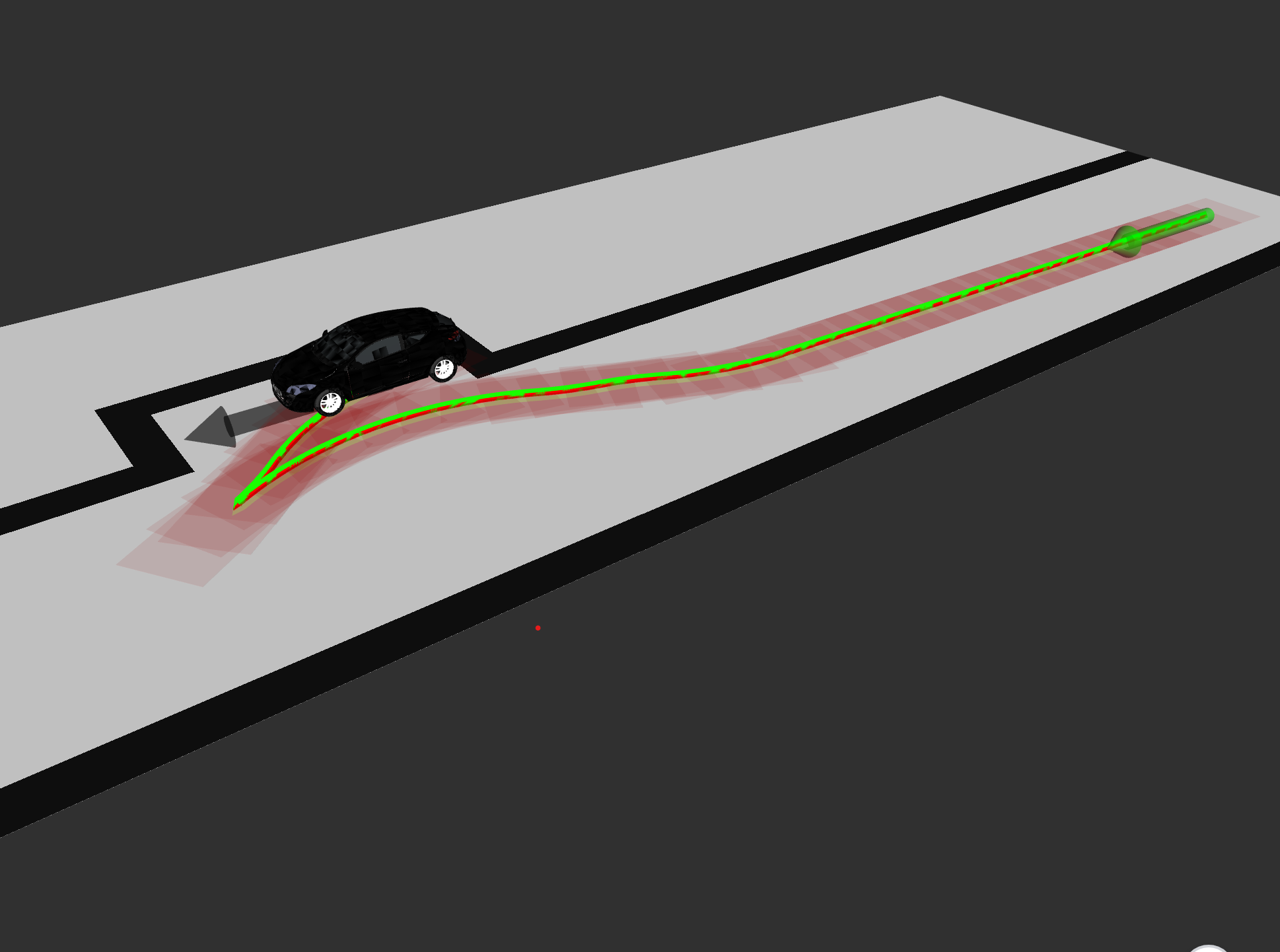
在 open space 空间下规划出⼀条⾃⻋到停⻋位的⽆碰撞轨迹 满⾜平滑约束 可跟踪
考虑动态障碍物约束
在路径不可⽤的情况下 具备重规划能⼒
重规划时能够做到⽆缝切换 即从原路径⽆缝切换到重规划路径 ⽆明显体感
规划频率 10HZ
看我的git
在 open space 空间下规划出⼀条⾃⻋到停⻋位的⽆碰撞轨迹 满⾜平滑约束 可跟踪
考虑动态障碍物约束
在路径不可⽤的情况下 具备重规划能⼒
重规划时能够做到⽆缝切换 即从原路径⽆缝切换到重规划路径 ⽆明显体感
规划频率 10HZ
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.pswp.cn/bicheng/93046.shtml 繁体地址,请注明出处:http://hk.pswp.cn/bicheng/93046.shtml 英文地址,请注明出处:http://en.pswp.cn/bicheng/93046.shtml
如若内容造成侵权/违法违规/事实不符,请联系英文站点网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!- 连接)














)


——资料分析、数量关系(40%-70%正确率的题目))
