一、按照维度区分
在信息系统中,“高速”是一个相对且多维的概念,其核心在于信号或数据的动态变化速率远超传统系统处理能力,导致必须采用专门的设计技术来保障传输质量与实时性。这一概念可从以下四个维度解析:
1、频率维度:高频信号的传输挑战
高速信号的频率通常处于数十兆赫兹(MHz)至数十吉赫兹(GHz)范围。例如:
- PCIe 5.0:二进制比特的数据速率达32GT/s,基波频率为16GHz,其信号上升沿时间需<15ps(皮秒),否则高频谐波会被传输介质衰减,导致边沿变缓(如15ps上升沿信号经FR4板材传输10cm后,上升沿可能延长至50ps)。
- 5G毫米波通信:工作频段在24-40GHz,信号波长仅7.5-12.5mm,对传输线尺寸(如微带线宽度需<0.1mm)和材料损耗(如Rogers 4350B板材损耗因子<0.0037)极为敏感。
关键结论:高频信号的传输需解决介质损耗、导体损耗和色散效应,否则信号幅度会随距离指数衰减(如1GHz信号在FR4走线中每10cm衰减约2dB)。
2、边沿速率维度:瞬态变化的物理本质
高速信号的“高速”本质由边沿速率(Slope Rate)决定,即单位时间内电压或电流的变化量。例如:
- HBM3内存接口:数据速率达819GB/s,信号上升沿时间<20ps,对应边沿速率>2V/ns。若边沿速率不足(如100ps上升沿),信号频谱中高频分量减少,边沿会变缓至100ps以上,导致时序违例。
- 激光雷达脉冲:脉冲宽度10ns,但上升沿时间0.5ns,其频谱主瓣宽度达2GHz,需采用高速ADC(采样率>4GS/s)才能无失真采集。
关键结论:边沿速率决定信号中的最大频率成分(fmax≈0.35/Tr),边沿越陡,高频分量越丰富,对传输线效应(如反射、串扰)越敏感。
3、时序维度:系统级实时性要求
高速信号的传输需满足严格的时序约束,否则会导致系统功能失效。例如:
- DDR5内存:时钟频率4.8GHz,数据选通信号(DQS)与数据信号(DQ)的建立/保持时间需<50ps,若传输延迟不匹配(如PCB走线长度差>2mm),会导致数据采样错误。
- PCIe 6.0:数据速率64GT/s,采用PAM4调制技术,每个符号携带2bit信息,但符号间干扰(ISI)需通过FEC(前向纠错)补偿,时序抖动需<5ps,否则误码率(BER)会超过10⁻¹²。
关键结论:高速信号的时序设计需考虑传输延迟、时钟偏移和抖动,通常采用源同步时钟(Source-Synchronous Clocking)或时钟树综合(CTS)技术来平衡时序。
4、应用维度:场景驱动的技术需求
高速信号的定义因应用场景而异,需结合具体需求权衡设计指标。例如:
- 数据中心:服务器间需传输400G/800G光信号,采用硅光子技术,电信号边沿速率需达20V/ns以上,同时需控制功耗(<10pJ/bit)和成本(<$1/Gbps)。
- 医疗影像:超声成像需实时处理GHz级回波信号,ADC采样率需>2GS/s,但功耗需<1W,需采用低功耗架构(如时间交织ADC)。
- 航空航天:飞行控制系统需传输纳秒级脉冲信号,需采用差分信号传输(如LVDS)和屏蔽电缆,以抑制电磁干扰(EMI)。
关键结论:高速信号的设计需在带宽、功耗、成本和可靠性之间取得平衡,不同场景对指标的优先级不同(如医疗影像优先低功耗,数据中心优先低成本)。
二、按照应用场景区分
1、数据中心:追求极致带宽与低延迟
场景特征:服务器间大规模数据交互(如AI训练、分布式存储)。
高速定义:
- 带宽:单通道速率达400G/800G(如800G OSFP光模块),总带宽可达Tbps级。单位时间传输二进制比特变化的数量。
- 延迟:端到端延迟需<1μs(如RDMA网络),否则会影响分布式计算效率。单端到端单比特传输的延时。
技术挑战: - 信号完整性:高速串行信号(如PCIe 6.0的64GT/s)需解决PAM4调制带来的符号间干扰(ISI),需采用FEC(前向纠错)和预加重技术。
- 功耗与散热:800G光模块功耗可能超过15W,需采用硅光子技术(如Co-Packaged Optics)降低功耗密度。
案例: - 谷歌TPU v4集群通过自定义光互联网络,实现1.6Pbps总带宽,延迟<100ns,支撑千亿参数大模型训练。
2、5G/6G通信:高频段与大规模MIMO
场景特征:移动终端与基站间无线数据传输。
高速定义:
- 峰值速率:5G下行达20Gbps(毫米波频段),6G目标达1Tbps。
- 频谱效率:需在高频段(如24-100GHz)实现高效传输,覆盖范围与速率的平衡。
技术挑战: - 高频信号衰减:毫米波信号在空气中衰减快(如28GHz信号每100m衰减约10dB),需采用波束成形(Beamforming)和大规模MIMO(64T64R)补偿。
- 移动性管理:高速移动(如高铁500km/h)会导致多普勒频移(可达10kHz),需动态调整载波频率。
案例: - 爱立信6G原型系统在140GHz频段实现100Gbps传输,采用智能超表面(RIS)技术解决非视距(NLOS)覆盖问题。
3、汽车电子:实时性与可靠性优先
场景特征:自动驾驶、车载娱乐等系统间数据交互。
高速定义:
- 实时性:传感器数据(如激光雷达点云)需在10ms内完成处理,否则影响决策延迟。
- 确定性延迟:车载以太网(如10Gbps TSN)需保证端到端延迟<100μs,抖动<1μs。
技术挑战: - 电磁兼容性(EMC):汽车内部电磁环境复杂(如电机干扰),需采用差分信号(如CAN FD)和屏蔽设计。
- 功能安全:需满足ISO 26262 ASIL-D级要求,高速信号需具备冗余传输和错误检测机制。
案例: - 特斯拉FSD芯片通过自定义车载网络架构,实现100Gbps总带宽,支持8个摄像头实时数据融合。
4、医疗影像:高分辨率与低噪声
场景特征:超声、MRI等设备的数据采集与处理。
高速定义:
- 采样率:超声成像需2-4GS/s ADC采样率,以捕捉GHz级回波信号。
- 动态范围:需同时处理微弱信号(如组织反射)和强信号(如骨骼反射),动态范围需>100dB。
技术挑战: - 低噪声设计:高速ADC需采用斩波稳定(Chopper Stabilization)技术降低1/f噪声。
- 功耗优化:便携式设备需将ADC功耗控制在<100mW,需采用时间交织(Time-Interleaved)架构。
案例: - GE Healthcare的MRI系统采用64通道高速接收机,采样率达100MS/s,动态范围120dB,支持亚毫米级成像。
5、航空航天:抗辐射与长寿命
场景特征:卫星、火箭等空间设备的数据传输。
高速定义:
- 速率:深空通信(如火星探测器)需支持Mbps级数据回传,同时需抵抗宇宙射线干扰。
- 可靠性:设备需在-55℃~125℃温度范围内稳定工作,寿命需>15年。
技术挑战: - 抗辐射加固:需采用SEU(单粒子翻转)免疫设计(如三模冗余TMR电路)。
- 轻量化:卫星载荷需将高速通信模块重量控制在<1kg,需采用CMOS工艺和集成化设计。
案例: - 詹姆斯·韦伯太空望远镜采用Ka波段高速下行链路,速率达28Mbps,通过LDPC编码实现误码率<10⁻¹²。
6、消费电子:成本与功耗的极致平衡
场景特征:智能手机、AR/VR等便携设备。
高速定义:
- 速率:USB4接口支持40Gbps,但需在<5W功耗下实现。
- 面积优化:芯片需集成高速接口(如MIPI C-PHY),同时控制面积<1mm²。
技术挑战: - 低功耗设计:需采用动态电压频率调整(DVFS)和电源门控(Power Gating)技术。
- 成本敏感:需使用低成本封装(如WLP)和成熟工艺节点(如28nm)。
案例: - 苹果M1芯片通过统一内存架构,实现200GB/s带宽,同时将功耗控制在<15W,支撑ProMotion显示屏的120Hz刷新率。
总结:高速的场景化定义框架
| 维度 | 数据中心 | 5G/6G通信 | 汽车电子 | 医疗影像 | 航空航天 | 消费电子 |
|---|---|---|---|---|---|---|
| 核心指标 | 带宽、延迟 | 峰值速率、频谱效率 | 实时性、确定性延迟 | 采样率、动态范围 | 速率、可靠性 | 速率、功耗 |
| 技术重点 | 信号完整性、散热 | 高频信号处理、MIMO | EMC、功能安全 | 低噪声、功耗优化 | 抗辐射、轻量化 | 成本、面积优化 |
| 典型速率 | 400G/800G | 20Gbps/1Tbps | 10Gbps TSN | 2-4GS/s ADC | Mbps级深空通信 | 40Gbps USB4 |
结论:高速是场景驱动的动态平衡,需根据具体需求在带宽、延迟、功耗、成本、可靠性等指标间取舍。例如,数据中心优先追求带宽和延迟,而消费电子则需在速率和功耗间找到最优解。理解这一场景化定义框架,是设计高速信息系统的关键前提。
三、速度的本质
是单位时间信号或数据变化的频次,频次越大,速度越大,或者说一次变化所需要的时间,时间越短,速度越大。
1、物理层本质:时间尺度与信号动态性
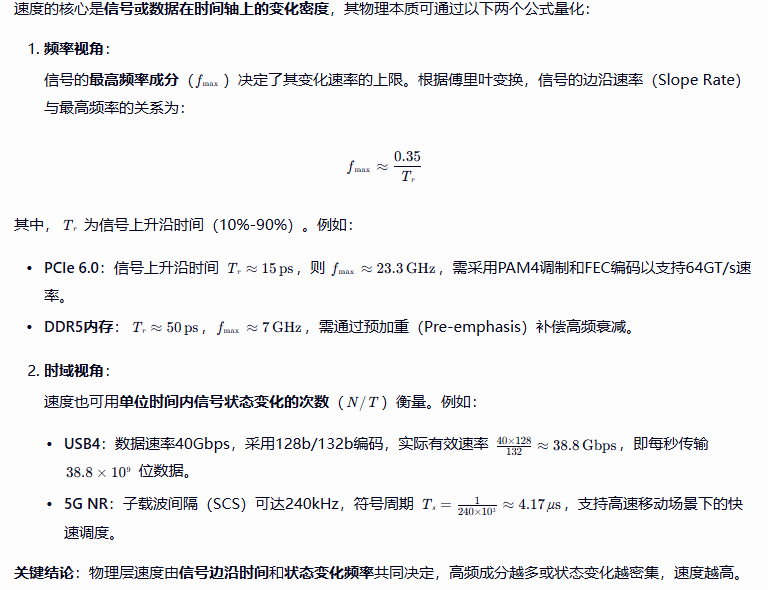
2、数学模型:微分与频谱的关联
从数学角度,速度的本质可通过微分和傅里叶变换揭示:
微分与边沿速率:
信号的瞬时变化率(即速度)是其导数的绝对值。例如,理想方波信号的导数为冲激函数(Dirac Delta),其频谱包含无限高频成分;实际信号因边沿有限,频谱被截断,导致最高频率受限。频谱与带宽:
信号的带宽(B)定义为频谱中幅度不低于最大值-3dB的频率范围。根据奈奎斯特准则,无失真传输的最小采样率为 2B。例如:- 激光雷达脉冲:脉冲宽度 τ=10ns,其频谱主瓣宽度 B≈τ0.44=44MHz,需采用ADC采样率 >88MS/s 以避免混叠。
- 超声成像信号:中心频率 f0=5MHz,带宽 B=2MHz,需采用采样率 >10MS/s 以捕获回波信号。
关键结论:数学上,速度与信号的频谱宽度直接相关,频谱越宽,信号变化越快,对采样和处理的要求越高。
3、工程实现:速度的约束与优化
在实际系统中,速度受物理介质、功耗、成本等多重约束,需通过技术手段平衡:
- 传输介质限制:
- 铜缆:FR4板材的损耗因子(Df)随频率升高而增加,导致高频信号衰减。例如,10GHz信号在FR4中传输10cm衰减约10dB,需采用低损耗材料(如Rogers 4350B,Df<0.0037)。
- 光纤:单模光纤的带宽可达THz级,但需高精度激光器(如DFB激光器)和相干检测技术(如QPSK调制)以支持高速传输。
- 功耗与速度的权衡:
- ADC设计:高速ADC(如>1GS/s)的功耗通常与采样率成正比。例如,TI的ADC12DJ5200RF采样率5.2GS/s,功耗达3.5W;而ADI的AD9680采样率500MS/s,功耗仅0.9W。
- 串行接口:PCIe 6.0通过PAM4调制将每符号携带比特数从1(NRZ)提升至2,在相同物理带宽下速率翻倍,但需更复杂的均衡技术(如CTLE+DFE)以补偿信号失真。
- 成本优化策略:
- 时间交织(Time-Interleaved):通过并行多个低速ADC(如4个1GS/s ADC交织)实现4GS/s总采样率,降低单芯片成本。
- 硅光子集成:将光电器件(如激光器、调制器)与CMOS电路集成在单一芯片上,减少封装成本(如Intel的100G PSM4光模块成本可降低至$50以下)。
关键结论:工程中速度的提升需解决介质损耗、功耗膨胀和成本瓶颈,需通过材料创新、算法优化和系统架构设计实现平衡。
4、案例验证:速度本质的实际应用
- 案例1:5G毫米波通信
- 问题:28GHz频段信号在空气中衰减快(自由空间路径损耗 L=32.4+20log(f)+20log(d),其中 f 单位GHz,d 单位km),导致覆盖范围受限。
- 解决方案:采用波束成形(Beamforming)技术,通过多天线阵列聚焦信号能量,补偿高频衰减。例如,华为64T64R AAU设备可实现1km覆盖半径下的10Gbps速率。
- 案例2:自动驾驶激光雷达
- 问题:激光雷达需在100m距离内检测反射信号,脉冲宽度需<10ns以区分目标,但高速ADC(如>1GS/s)成本高。
- 解决方案:采用时间数字转换器(TDC)替代传统ADC,通过测量脉冲飞行时间(ToF)直接获取距离信息,功耗降低至<100mW,成本降至<$50。
- 案例3:数据中心硅光互联
- 问题:800G光模块功耗可能超过15W,导致散热困难。
- 解决方案:采用共封装光学(CPO)技术,将光引擎与交换机ASIC集成在单一封装内,缩短电信号传输距离(<10cm),降低功耗至<10W。
总结:速度本质的三层理解
| 维度 | 核心描述 | 工程意义 |
|---|---|---|
| 物理层 | 速度由信号边沿时间和状态变化频率决定,高频成分越多或变化越密集,速度越高。 | 需选择低损耗介质(如光纤)、优化信号边沿(如预加重)以支持高速传输。 |
| 数学模型 | 速度与信号频谱宽度直接相关,频谱越宽,信号变化越快,对采样和处理要求越高。 | 需根据奈奎斯特准则设计采样率,采用频谱整形技术(如升余弦滤波)避免混叠。 |
| 工程实现 | 速度受介质、功耗、成本约束,需通过技术创新(如PAM4、硅光子)实现平衡。 | 需在速度、功耗、成本间取舍,例如采用时间交织ADC降低单芯片成本,或CPO降低功耗。 |
最终结论:速度的本质是单位时间内信号或数据变化的频次,其物理表现是高频成分的丰富度,数学基础是频谱宽度,工程实现则是多约束条件下的优化问题。理解这一本质,是设计高速信息系统的关键前提。








--学习笔记17(Websocket))

,外加安装两个常用插件)




与 JDK、Maven、MyBatis-Plus、Tomcat 的版本对应关系及关键注意事项)



