自动驾驶中的坐标系概念及相互间的转换公式推导
在自动驾驶系统中,多个坐标系用于描述车辆、传感器和环境的相对位置。这些坐标系之间的转换是实现定位、感知和控制的关键。下面我将逐步解释常见坐标系的概念,并推导相互转换的公式。推导基于标准几何变换和齐次坐标表示,确保公式正确可靠。
一、坐标系概念
在自动驾驶中,主要涉及以下坐标系:
- 世界坐标系(World Coordinate System):全局坐标系,固定在地球上(如基于GPS或地图),原点通常为固定参考点(如起点)。用于描述车辆和环境在全局中的位置。
- 车辆坐标系(Vehicle Coordinate System):以车辆为中心,原点通常在车辆重心或后轴中心。xxx轴指向车辆前进方向,yyy轴指向左侧,zzz轴向上。用于描述车辆自身状态。
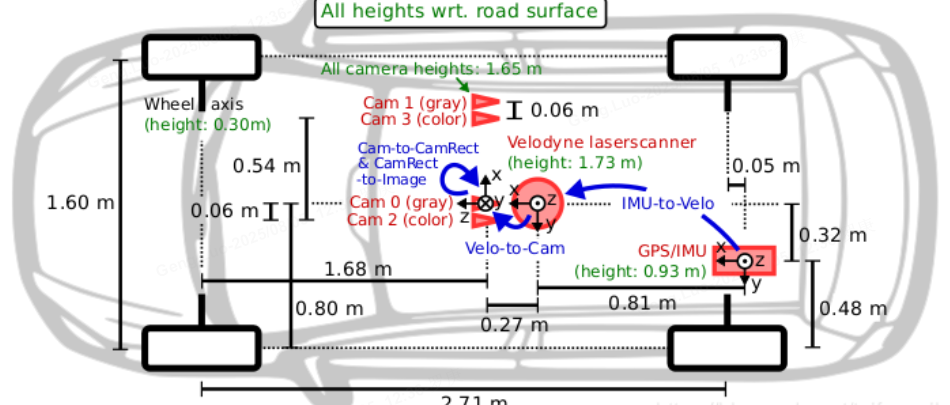
- 传感器坐标系(Sensor Coordinate System):以传感器(如激光雷达、摄像头)为中心,原点在传感器安装点。每个传感器有自己的坐标系,用于描述传感器测量数据。
- 相机坐标系(Camera Coordinate System):针对摄像头,原点在相机光心,zzz轴沿光轴方向,xxx轴和yyy轴平行于图像平面。用于描述点在相机空间的位置。
- 像素坐标系(Pixel Coordinate System):针对图像传感器,原点在图像左上角,uuu轴向右,vvv轴向下。用于描述像素位置。
这些坐标系相互关联,需要通过旋转和平移进行转换。转换通常使用齐次坐标(Homogeneous Coordinates)来表示,以简化矩阵运算。齐次坐标形式为 [xyz1]\begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix}xyz1。
二、坐标系转换公式推导
转换公式推导基于欧几里得变换,包括旋转矩阵(Rotation Matrix)和平移向量(Translation Vector)。旋转矩阵表示方向变化,平移向量表示位置偏移。推导从简单到复杂,逐步构建完整转换链。
步骤1: 世界坐标系到车辆坐标系的转换
- 概念:车辆坐标系相对于世界坐标系的位置和方向变化,由车辆的位姿(位置和姿态)定义。
- 推导:
- 设点 Pw=[xwywzw]P_w = \begin{bmatrix} x_w \\ y_w \\ z_w \end{bmatrix}Pw=xwywzw 在世界坐标系。
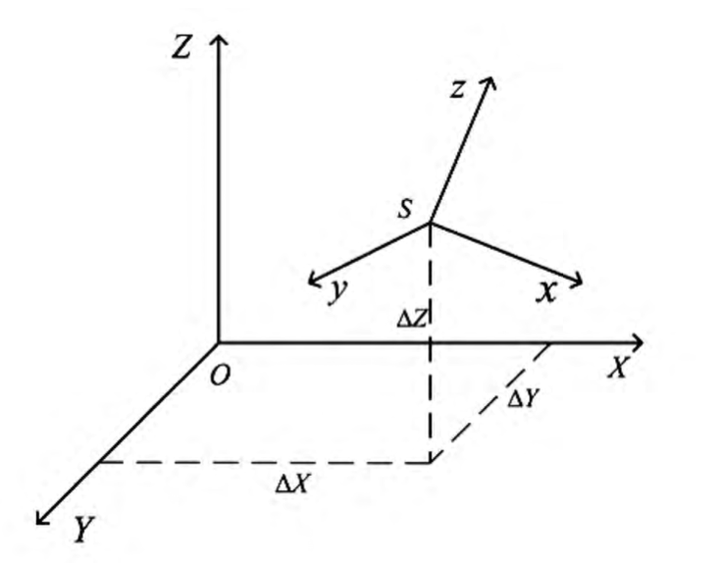
- 设旋转矩阵 RwvR_{wv}Rwv(从世界到车辆)表示方向变化,平移向量 twv=[txtytz]t_{wv} = \begin{bmatrix} t_x \\ t_y \\ t_z \end{bmatrix}twv=txtytz 表示车辆原点在世界坐标系中的位置。
- 在车辆坐标系中,点 PvP_vPv 的坐标为:
Pv=Rwv(Pw−twv) P_v = R_{wv} (P_w - t_{wv}) Pv=Rwv(Pw−twv) - 使用齐次坐标简化:
[Pv1]=[Rwv−Rwvtwv01][Pw1] \begin{bmatrix} P_v \\ 1 \end{bmatrix} = \begin{bmatrix} R_{wv} & -R_{wv} t_{wv} \\ 0 & 1 \end{bmatrix} \begin{bmatrix} P_w \\ 1 \end{bmatrix} [Pv1]=[Rwv0−Rwvtwv1][Pw1] - 定义变换矩阵 Twv=[Rwv−Rwvtwv01]T_{wv} = \begin{bmatrix} R_{wv} & -R_{wv} t_{wv} \\ 0 & 1 \end{bmatrix}Twv=[Rwv0−Rwvtwv1],则:
[Pv1]=Twv[Pw1] \begin{bmatrix} P_v \\ 1 \end{bmatrix} = T_{wv} \begin{bmatrix} P_w \\ 1 \end{bmatrix} [Pv1]=Twv[Pw1] - 其中,RwvR_{wv}Rwv 是正交矩阵,满足 RwvRwvT=IR_{wv} R_{wv}^T = IRwvRwvT=I(单位矩阵),表示纯旋转。
步骤2: 车辆坐标系到传感器坐标系的转换
- 概念:传感器(如激光雷达)安装在车辆上,其坐标系相对于车辆坐标系有固定偏移。
- 推导:
- 设点 Pv=[xvyvzv]P_v = \begin{bmatrix} x_v \\ y_v \\ z_v \end{bmatrix}Pv=xvyvzv 在车辆坐标系。
- 设旋转矩阵 RvsR_{vs}Rvs(从车辆到传感器)和平移向量 tvs=[tsxtsytsz]t_{vs} = \begin{bmatrix} t_{sx} \\ t_{sy} \\ t_{sz} \end{bmatrix}tvs=tsxtsytsz(传感器原点在车辆坐标系中的位置)。
- 在传感器坐标系中,点 PsP_sPs 的坐标为:
Ps=Rvs(Pv−tvs) P_s = R_{vs} (P_v - t_{vs}) Ps=Rvs(Pv−tvs) - 齐次坐标形式:
[Ps1]=[Rvs−Rvstvs01][Pv1] \begin{bmatrix} P_s \\ 1 \end{bmatrix} = \begin{bmatrix} R_{vs} & -R_{vs} t_{vs} \\ 0 & 1 \end{bmatrix} \begin{bmatrix} P_v \\ 1 \end{bmatrix} [Ps1]=[Rvs0−Rvstvs1][Pv1] - 定义变换矩阵 Tvs=[Rvs−Rvstvs01]T_{vs} = \begin{bmatrix} R_{vs} & -R_{vs} t_{vs} \\ 0 & 1 \end{bmatrix}Tvs=[Rvs0−Rvstvs1],则:
[Ps1]=Tvs[Pv1] \begin{bmatrix} P_s \\ 1 \end{bmatrix} = T_{vs} \begin{bmatrix} P_v \\ 1 \end{bmatrix} [Ps1]=Tvs[Pv1] - 结合步骤1,世界到传感器的转换:
[Ps1]=TvsTwv[Pw1] \begin{bmatrix} P_s \\ 1 \end{bmatrix} = T_{vs} T_{wv} \begin{bmatrix} P_w \\ 1 \end{bmatrix} [Ps1]=TvsTwv[Pw1]
步骤3: 相机坐标系到像素坐标系的转换
- 概念:摄像头将3D点投影到2D图像平面,转换涉及相机内参(焦距、光心)。
- 推导:
- 设点 Pc=[xcyczc]P_c = \begin{bmatrix} x_c \\ y_c \\ z_c \end{bmatrix}Pc=xcyczc 在相机坐标系。
- 使用针孔相机模型:点投影到图像平面,坐标 (xp,yp)(x_p, y_p)(xp,yp) 满足:
xp=fxxczc,yp=fyyczc x_p = \frac{f_x x_c}{z_c}, \quad y_p = \frac{f_y y_c}{z_c} xp=zcfxxc,yp=zcfyyc
其中 fxf_xfx 和 fyf_yfy 是等效焦距(考虑像素缩放)。 - 转换到像素坐标系,考虑光心偏移 (cx,cy)(c_x, c_y)(cx,cy):
u=fxxczc+cx,v=fyyczc+cy u = f_x \frac{x_c}{z_c} + c_x, \quad v = f_y \frac{y_c}{z_c} + c_y u=fxzcxc+cx,v=fyzcyc+cy - 写成矩阵形式:
[uv1]=1zc[fx0cx0fycy001][xcyczc] \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \frac{1}{z_c} \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x_c \\ y_c \\ z_c \end{bmatrix} uv1=zc1fx000fy0cxcy1xcyczc - 定义相机内参矩阵 K=[fx0cx0fycy001]K = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}K=fx000fy0cxcy1,则:
[uv1]≡K[xc/zcyc/zc1] \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} \equiv K \begin{bmatrix} x_c / z_c \\ y_c / z_c \\ 1 \end{bmatrix} uv1≡Kxc/zcyc/zc1
(其中 ≡\equiv≡ 表示齐次坐标等价,需归一化处理)。
完整转换链示例:世界坐标系到像素坐标系
- 场景:给定世界坐标系中的点,如何得到其在图像中的像素位置(如用于目标检测)。
- 推导:
- 结合所有步骤:世界坐标系 → 车辆坐标系 → 传感器坐标系(相机) → 像素坐标系。
- 设传感器是相机,则从步骤2:Ps=PcP_s = P_cPs=Pc(相机坐标系)。
- 转换链:
[Pc1]=TvsTwv[Pw1] \begin{bmatrix} P_c \\ 1 \end{bmatrix} = T_{vs} T_{wv} \begin{bmatrix} P_w \\ 1 \end{bmatrix} [Pc1]=TvsTwv[Pw1]
[uv1]=1zcK[I0][Pc1] \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \frac{1}{z_c} K \begin{bmatrix} I & 0 \end{bmatrix} \begin{bmatrix} P_c \\ 1 \end{bmatrix} uv1=zc1K[I0][Pc1]
(其中 [I0]\begin{bmatrix} I & 0 \end{bmatrix}[I0] 提取 PcP_cPc 的前三维)。 - 完整公式:
[uv1]=1zcK[I0]TvsTwv[Pw1] \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \frac{1}{z_c} K \begin{bmatrix} I & 0 \end{bmatrix} T_{vs} T_{wv} \begin{bmatrix} P_w \\ 1 \end{bmatrix} uv1=zc1K[I0]TvsTwv[Pw1] - 简化:令 zcz_czc 是 PcP_cPc 的 zzz 分量,计算时需先求解 PcP_cPc。
三、关键注意事项
- 旋转矩阵计算:旋转矩阵通常由欧拉角或四元数推导。例如,绕 zzz 轴旋转 θ\thetaθ 角:
Rz(θ)=[cosθ−sinθ0sinθcosθ0001] R_z(\theta) = \begin{bmatrix} \cos \theta & -\sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{bmatrix} Rz(θ)=cosθsinθ0−sinθcosθ0001 - 误差处理:实际系统中,转换参数(如 RwvR_{wv}Rwv, twvt_{wv}twv)通过标定获得,可能涉及优化算法(如最小二乘法)减少误差。
- 应用:这些转换用于传感器融合(如融合摄像头和激光雷达数据)、路径规划等。确保转换链一致,避免累积误差。
这个推导基于标准几何原理,在自动驾驶系统中广泛应用。如果您有具体场景(如特定传感器类型),我可以进一步细化推导。



与 JDK、Maven、MyBatis-Plus、Tomcat 的版本对应关系及关键注意事项)







超详细总结)

)





