此练习主要是比例积分控制,包括三部分:
①系统建模;
②PI控制器;
③PI控制器的应用;
以下是,第③部分:PI控制器的应用。
一、比例积分控制的应用模型
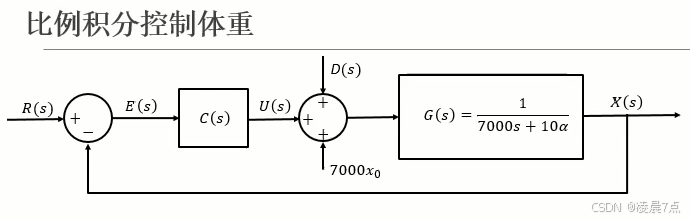
1、整个系统是如图,这样一个单位反馈的形式;
2、这个系统存在扰动D(s),因此无法直接用feedback命令来建立闭环传递函数,所以需要手动的推导。
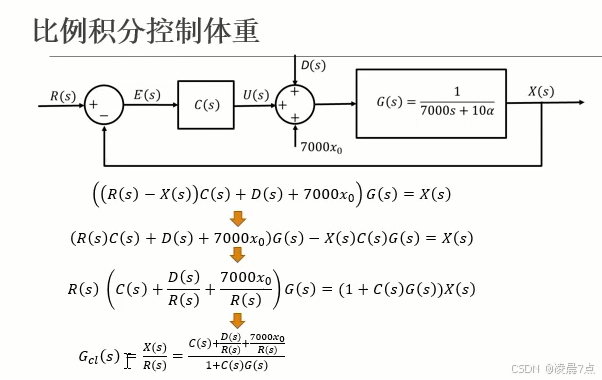
3、将整个系统的推导过程如下图,最后就能求出输入R(s)和输出X(s)之间的关系,也就得到整个系统闭环传递函数Gcl(s)。
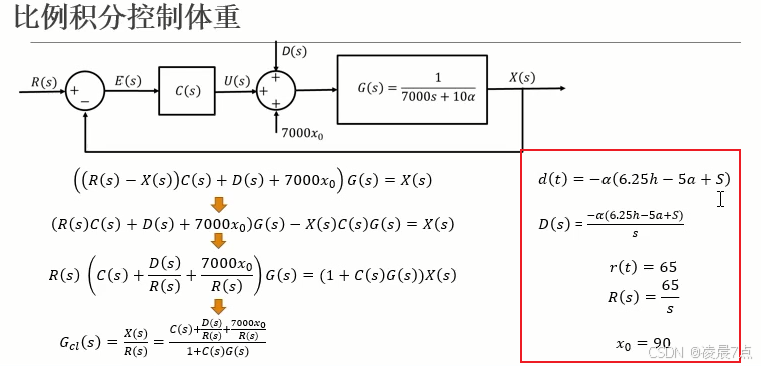
4、其中D(s)就是d(t)的表达式,进行拉普拉斯变换;
5、从练习05的案例一,这个体重作为例子:即目前体重x0=90,准备减到目标参考值r(t)=65。
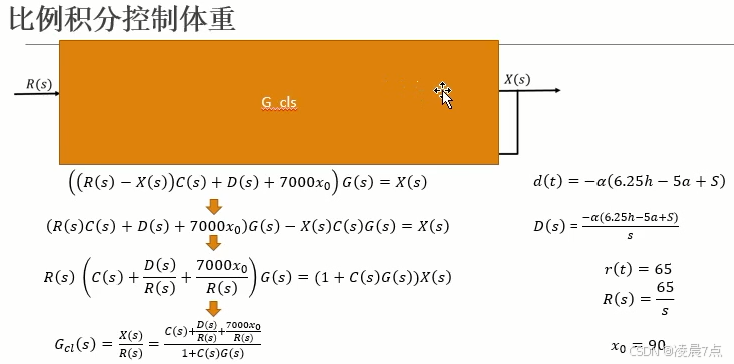
6、此时整个系统,就可以把中间这么多,看成新的闭环系统G_cls。
7、因为R(s)是常数输入,所以输出X(s)就相当于它的单位阶跃响应x对应的R倍。
clc;clear;close all;
%% 定义参数
S = 5;
x0 = [70];
h = 175;
a = 20;
Ei = [2500,2100,2500];
alpha = 1.3;
Ea = [0, 0, 500];
%% 定义G(s)
G_s = tf([1],[7000,10*alpha]);
%% 定义扰动
d = -alpha*(6.25*h-5*a+S);
D_s = tf([d],[1 0]);
%%%% 定义比例积分微分控制
kp = 200;
ki = 1;
kd = 0;
C_s = pid(kp, ki, kd);
%% 仿真
x0 = [90];
R_s = tf([65],[1 0]);
sys_cl = G_s*(C_s + D_s/R_s + 7000*x0/R_s)/(1 + G_s* C_s);
%% 定义输入
t = 0: 1: 3000;
R = 65;
x = R*step(sys_cl,t);%因为R(s)是常数输入,所以输出就相当于它的单位阶跃响应*对应的R倍。
plot (x);
grid on;
%%二、运行结果及分析
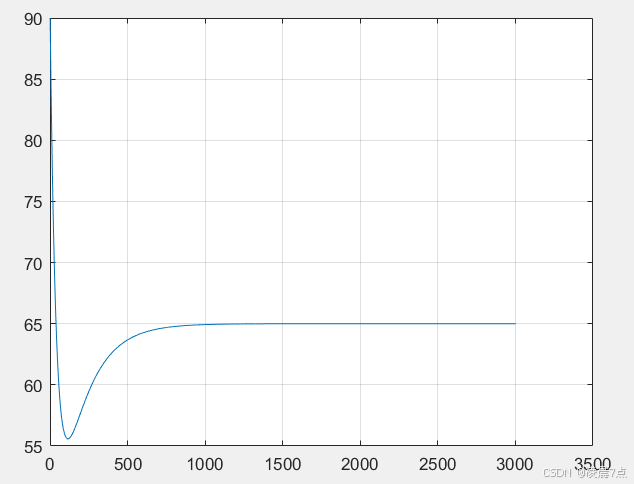
1、Kp=200,Ki=1,Kd=0;
(比例积分PI结合,此时从响应速度、最后稳定值都能快速到参考值65)
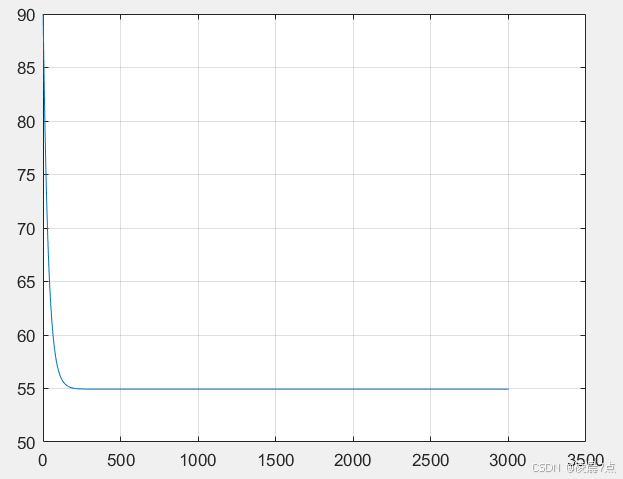
2、Kp=200,Ki=0,Kd=0;
(只有比例项P,此时无法到65,存在稳态误差)
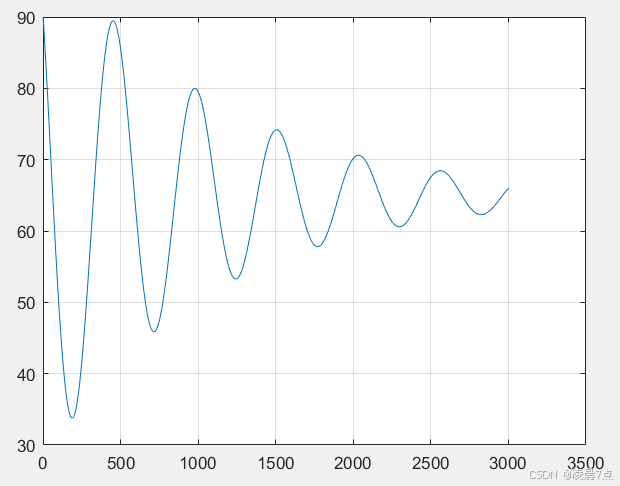
3、Kp=0,Ki=1,Kd=0;
(只有积分项I,此时存在非常大的振荡)
学习来源:《控制之美》[卷1],王天威







实现)
)

)
React +Ts(vite创建项目/useState/Props/Interface))

解释)



,严禁抄袭!)
)
