目录:
一、人工肌肉的种类及人形机器人适用情况
二、人形机器人用人工肌肉科研机构及其最新成果进展
三、液压人工肌肉种类及工作机制
四、液压人工肌肉适用人形机器人的性能要求和局限性
五、液压人工肌肉材料技术进展及其限制与突破
六、波士顿动力Spot的液压静液传动系统
柔性人工肌肉
一、人工肌肉的种类及适用于人形机器的比较优势
人工肌肉作为仿生驱动技术的核心,其形式多样,工作机制各异,在人形机器人领域的适用性需结合功率密度、响应速度、生物相似性及系统集成复杂度综合评估。
(一)人工肌肉的主要形式与工作机制
1. 液压/气动驱动型
代表技术:北亚利桑那大学的“通心粉”肌肉(cavatappi),通过拉伸-扭转-盘绕聚合物管形成螺旋结构,液压/气压输入引发局部解捻,实现轴向收缩。
性能:机械效率近45%,比功380 J/kg(人体骨骼肌的10倍),比功率1.42 kW/kg(人体5倍)。
优势:高功率密度、抗过载能力强,适合需爆发力的关节(如腿部蹬伸)。
2. 智能材料驱动型
1)电热/化学响应肌肉:
碳纤维-橡胶复合肌肉(伊利诺伊大学):碳纤维缠绕硅橡胶,通电或注入液体(如己烷)触发膨胀收缩,单根0.4mm肌肉可提拉自重12,600倍负载。
渔线/缝纫线肌肉(德州大学):高强度聚合物纤维加捻盘绕,温度变化引发收缩/伸展,收缩率50%(远超天然肌肉20%),功率密度7.1马力/千克。
2)磁响应肌肉(韩国蔚山研究院):
铁磁颗粒+形状记忆聚合物,磁场控制下刚度提升2700倍,可承重自重3690倍。
3. 仿生结构驱动型
腱绳驱动系统:电机牵引合成纤维绳模拟肌腱,通过滑轮传动实现关节弯曲(如仿人机械手指)。
液压肌肉骨骼系统(波兰Clone Robotics):McKibben肌肉(橡胶管+编织网)液压驱动,复刻人类肌肉-骨骼-血管系统,支持200+自由度,动作流畅低噪。
仿生肌腱驱动(河南“行者二号”):轻量化肌腱模块实现类人步态,100万次屈伸零故障,续航6小时9。
(二)人形机器人场景的肌肉类型适配性分析
人形机器人需兼顾运动拟人性、环境交互安全性、能耗经济性及系统紧凑性。以下为关键评估维度:
1. 运动性能与生物相似性
最优选择:液压肌肉骨骼系统(如Clone Robotics的McKibben肌肉)。其解剖级复刻人类肌肉,液压驱动支持多关节协同,动作自然度接近生物体,适合家庭服务等需高亲和力场景。
次优方案:“通心粉”液压肌肉。高功率密度适合动态运动(如奔跑、爬楼梯),但生物相似性较低。
2. 力量密度与能效
碳纤维/渔线肌肉:碳纤维肌肉承重比达12,600:1,渔线肌肉功率密度媲美喷气发动机47。但温控响应存在迟滞,适合单点爆发动作(如抓握重物),而非连续精细操作。
磁控复合肌肉:远程磁场控制免去线缆束缚,承重能力突出(自重3690倍),适合空间受限关节(如手指)。
3. 系统集成与可靠性
腱绳驱动:结构简单、控制精准(如肌电信号操控的仿人手),但绳索磨损需定期维护。
仿生肌腱(“行者二号”):模块化设计降低故障率,6小时续航+多地形适应性(沙地、楼梯)平衡了性能与能耗。
柔性人工肌肉的制造过程
(三)综合推荐:液压驱动与仿生肌腱的协同方案
1.分级驱动策略
为兼顾人形机器人的运动拟人性与工程可行性,建议采用分级驱动策略:

液压驱动与仿生肌腱协同方案
2. 选择
依据:
自然运动与交互安全:McKibben肌肉的柔软性和液压平滑性避免刚性撞击风险。
能效比:仿生肌腱驱动能耗低于传统电机,适合长时任务(如巡检、陪护)。
技术成熟度:液压系统在机器人关节已有商用案例(如Boston Dynamics),而磁控/碳纤维肌肉仍处实验室优化阶段。
(四)总结:
1. 未来突破方向
材料-结构融合创新:如液态金属填充碳纤维提升电响应速度,或磁控肌肉实现无接触精确驱动。
智能闭环系统:肌电信号+AI预测控制(如仿人手抓握力度自适应)。
仿生材料轻量化:开发类胶原蛋白聚合物,进一步降低肌腱质量并提升韧性9。
2. 结论
人形机器人需在“类人运动”与“工程可靠性”间取得平衡——液压驱动型肌肉(McKibben与‘通心粉’) 因其高生物相似性与功率密度成为当前最优解,尤其适合家庭服务场景;轻量化仿生肌腱则在工业级耐久性上更胜一筹。未来随着磁控、电化学响应肌肉的技术成熟,人形机器人驱动系统将向无缆化、自适应方向跃迁。
二、人形机器人用人工肌肉科研机构及其最新成果进展
(一)人工肌肉主要技术路线及代表性成果
1. 液压驱动仿生肌肉
通过液压油压力驱动柔性囊体收缩,模拟生物肌肉运动,具备高功率密度和柔顺性。代表成果:
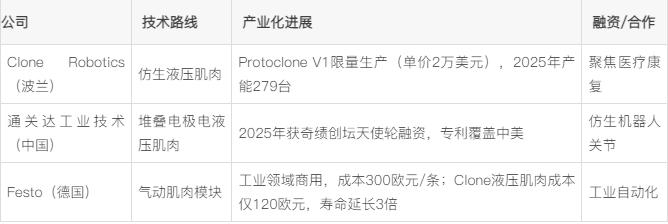
波兰Clone Robotics的Protoclone V1:采用206块聚合物骨骼+1000条液压人造肌纤维(McKibben型),单根肌纤维重3克可产生1公斤拉力,功率密度达200W/kg。配备微型500W电动泵“心脏”,液压油以6.8巴压力循环,肩部20自由度、脊柱每节6自由度,支持类人动作(0.3秒响应握手)。
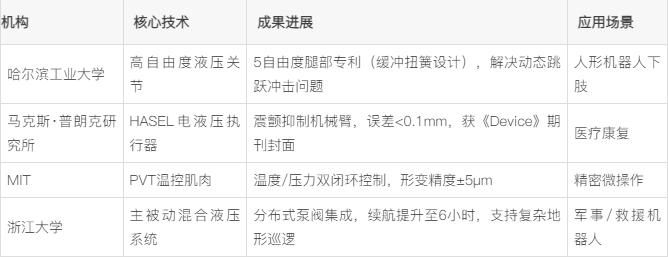
哈尔滨工业大学5自由度液压腿部机构:专利CN118770420A,集成膝盖/脚踝扭簧缓冲装置,解决落地冲击问题,支持跳跃和复杂地形行走。
2. 电液压人工肌肉
将电场控制与液压结合,实现静音、节能驱动。代表成果:
通关达工业技术堆叠电极型肌肉:双螺旋堆叠电极结构(2021中国专利/2024美国专利),取消传统泵阀系统,直接通过电极调节液压油流动,节能40%且支持水下作业。
马克斯·普朗克研究所HASEL执行器:用于震颤抑制机械臂,通过电液压驱动补偿帕金森患者手部震颤,实现隐蔽式穿戴设计;
3. 智能材料驱动肌肉
磁流体肌肉(陆华峰专利CN103598930A):螺旋线圈激发磁流体产生液压,使星形条状囊收缩,拉力可调且结构紧凑,适用于假肢和微型机器人。
热塑弹性体肌肉(刘洋专利CN119871364A):分腔室气囊+TPU材料,通过独立气腔控制实现弯曲/扭转多自由度运动,体积比传统模块减少50%。
4. 混合驱动与结构创新
浙江大学主被动液压下肢(专利202410592231):分布式液压系统+步态分析算法,行走时膝关节纯被动工作,续航提升200%;上楼梯时主动驱动,扭矩密度>200N·m/kg。
MIT的PVT温控肌肉:TPU钢丝管+液体介质,压力/温度闭环控制形变量,精度达微米级,适用于精密手术机器人。
(二)全球主要研发机构及成果进展
1. 高校与科研机构
2. 企业与初创公司
(三)知识产权布局分析
1. 专利技术分布:
液压/气动主导:占已公开专利的65%(如哈工大CN118770420A、Clone的McKibben肌肉结构)。
电液压崛起:通关达堆叠电极专利(中美授权)成为近3年增长最快领域。
材料创新:热塑弹性体(CN119871364A)、磁流体(CN103598930A)推动轻量化与多自由度。
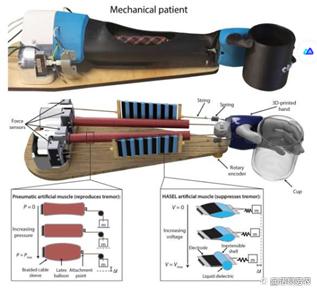
对抗生物机械臂震颤的人工肌肉
2. 技术保护策略:
高校专利侧重基础结构(如浙大分布式液压系统),企业专利聚焦集成与降本(如通关达电极设计)。Clone Robotics开源部分肌纤维设计,但保留“心血管系统”泵控技术专有权。

人工肌肉技术路线性能对比
(四)技术挑战与未来趋势
1. 现存瓶颈
能效与密封:液压系统效率普遍<45%(电动>90%),高压密封寿命不足千小时。
量产成本:Protoclone V1手工组装1000条肌纤维,成本达Optimus的10倍5。
控制复杂度:多自由度协同算法不成熟,双足平衡步态预测仅50步以内。
2. 突破方向
材料-结构融合:液态金属填充碳纤维(应变87%+低电压驱动)、磁流变液实时调粘68。
混合驱动架构:特斯拉Optimus液压爆发力+电机精细控制;ExoMuscle电机嵌入液压缸,效率提至69%。
仿生优化:类羽毛肌肉结构(可变应力分布)、仿肌腱模块化设计(“行者二号”100万次零故障)。
(五)结论:
1. 技术路线竞争与产业分化
医疗康复领域:Clone Robotics和MPI-IS的柔性肌肉因生物相容性和安全性占优,但需解决“恐怖谷效应”。
工业/军事领域:浙大/哈工大液压下肢、通关达电液压肌肉凭借高负载和环境适应性更具落地潜力。
2. 未来3年关键赛道:
液态金属密封技术(突破泄漏瓶颈),分布式微型泵阀系统(取代集中油路),神经接口-肌肉闭环控制(实现反射级响应)。
全球人工肌肉研发已进入仿生结构与智能材料双轨并行的爆发期,中国在电液压专利(通关达)和混合系统(浙大)方面进展迅速,而欧洲(Clone、Festo)仍主导生物仿真设计。未来产业将分化出高仿生服务机器人与高可靠工业执行器两大方向。
三、液压人工肌肉种类及工作机制
(一)基本概念
液压人工肌肉(Hydraulic Artificial Muscle, HAM),也称为液压驱动执行器或液压软执行器,是一种利用液压流体(通常是油)的压力变化来产生类似生物肌肉收缩/伸长运动的装置。它们旨在模仿生物肌肉的某些特性,如柔顺性、高功率密度和直接线性驱动能力。
液压肌肉的核心目标是将液压能高效地转换为机械能(通常是沿轴向的线性力和位移)。
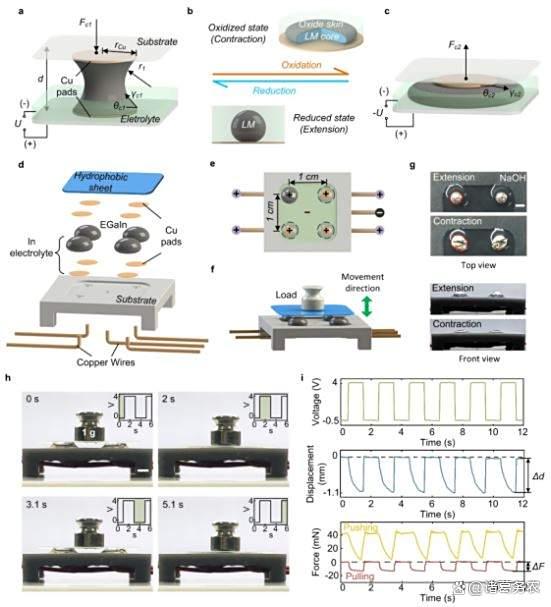
液态金属人工肌肉的驱动
(二)液压人工肌肉的种类
液压人工肌肉的设计多种多样,但主要可以分为以下几大类:
1. 囊式/波纹管式液压肌肉 (Bladder/Bellows Type):
结构: 核心是一个柔性、可膨胀的内囊(通常由橡胶或弹性聚合物制成),外面包裹着高强度但不可延展的约束层(如编织纤维网套、凯夫拉纤维束或金属网)。内囊两端有密封接头连接液压管路。
工作机制: 当向囊内注入液压油并加压时,内囊试图径向膨胀。但外层约束层限制了径向膨胀,迫使其主要沿轴向伸长(类似吹气球时气球两端被拉远)。当压力降低时,囊体材料的弹性或外部负载使其收缩回原始状态。
特点: 最接近生物肌肉的外观和收缩行为(加压伸长,减压收缩)。柔顺性好,功率密度高。但可能存在迟滞和蠕变问题。
2. 活塞-缸筒式液压肌肉 (Piston-Cylinder Type):
结构: 本质上是一个改良的液压缸。通常包括一个缸筒、一个活塞、活塞杆以及密封件。设计上可能更注重紧凑性和集成性。
工作机制: 与传统液压缸相同。压力油作用于活塞一侧(单作用或双作用),推动活塞杆做直线运动,产生力。
特点: 技术成熟,精度高,出力大,控制性好。但通常刚性较大,柔顺性不如囊式肌肉,且存在摩擦和密封问题,功率密度可能低于优化的囊式肌肉。有时也被广义地归为人工肌肉的一种,但更偏向于传统执行器。
3. 纤维增强弹性体管式 (Fiber-Reinforced Elastomeric Enclosure - FREE):
结构: 一个由弹性材料(如硅橡胶)制成的管状结构,其外部或内部嵌入了特定角度排列的高强度纤维(如尼龙、芳纶)。纤维的缠绕角度决定了加压时的变形模式(收缩、伸长或扭转)。
工作机制: 当管内注入液压油加压时,弹性管壁试图膨胀。纤维网络约束了膨胀方向,根据纤维的几何排列(螺旋角),管壁会优先沿特定方向变形。如果纤维缠绕角小于某个临界值(如54.7度),加压会导致轴向收缩;大于该角度则导致轴向伸长。
特点: 设计灵活,可通过纤维角度编程变形模式(收缩、伸长、弯曲、扭转)。柔顺性优异,结构紧凑。制造相对复杂,需要精确控制纤维角度。
4. 其他类型:
滚动隔膜式: 使用一个可滚动的隔膜来传递压力,减少摩擦。
拉胀结构式: 利用具有负泊松比效应的特殊结构材料,加压时在特定方向收缩。
混合驱动式: 结合液压驱动与其他驱动方式(如形状记忆合金、电活性聚合物)或结构。

Protoclone机器人高仿人手
(三)液压人工肌肉的工作机制 (以典型囊式为例)
1. 初始状态: 肌肉处于未加压状态,长度较短(L₀),直径较小。
2. 加压驱动 (伸长/产生力):
过程:液压泵将油液通过管路压入肌肉内部的密闭腔室;油压升高,试图使柔性内囊在所有方向膨胀。
关键约束:外层高强度编织网套(或其他约束结构)具有很强的周向强度,极大地限制了内囊的径向膨胀;
能量转换途径:由于径向膨胀受阻,液压能主要转化为迫使内囊轴向伸长的机械能。内囊材料被拉伸,肌肉整体长度增加(L > L₀);
产生力: 肌肉两端连接的负载会阻碍其伸长。肌肉内部产生的轴向力(收缩力)作用于两端接头,试图拉动负载。这个力的大小与内部液压压力、肌肉的有效截面积以及约束层的力学特性直接相关 (F ≈ P * A_effective)。
3. 减压/回程 (收缩/复位):
系统压力降低(通过阀门释放油液),作用在内囊上的液压压力减小。恢复力来源:
内囊材料的弹性: 被拉伸的弹性材料试图恢复其原始形状,推动油液流出,使肌肉长度缩短。
外部负载: 如果肌肉在驱动时拉动了负载(如重力负载),在减压时,该负载会反向拉动肌肉,帮助其收缩。
(可选) 辅助复位机构: 在需要更快或更可靠收缩的应用中,可能使用弹簧、另一块拮抗肌肉或辅助液压回路来提供恢复力。
4.控制:
通过伺服阀或比例阀精确控制进入/流出肌肉的液压油流量和压力,可以实现对肌肉位置、速度、力的精确控制。
(四)液压人工肌肉的核心优势和面临的挑战
1. 核心优势
极高的功率密度和力密度: 在很小的体积和重量下能产生巨大的力,远超电机和许多气动肌肉。
直接线性驱动: 输出是直接的直线运动,无需旋转到直线运动的转换机构(如丝杠、齿轮齿条)。
柔顺性和固有安全性: 流体介质和柔性结构使其具有良好的被动柔顺性,在与人或环境交互时更安全,能吸收冲击。
抗冲击和过载能力: 液压系统本身具有缓冲作用,且压力可泄放保护系统。
能在恶劣环境下工作: 良好的抗污染、防水、防火(使用阻燃液)能力。
2. 面临的挑战
密封问题: 柔性部件的长期可靠密封是关键挑战,泄漏会影响性能和效率。
迟滞和非线性: 弹性材料的粘弹性和摩擦会导致响应迟滞和输入输出的非线性关系,影响控制精度。
需要液压动力单元: 需要油泵、油箱、阀块等辅助系统,增加了系统的复杂性和体积。
效率: 管路损失、阀口损失、摩擦损失等会降低整体效率。
维护: 液压系统通常需要比电气系统更多的维护。
(五)液压人工肌肉的应用领域
液压人工肌肉因其高力密度和柔顺性,在以下领域具有应用潜力:
机器人(尤其是仿人机器人、协作机器人): 驱动关节,提供类似肌肉的柔顺运动。
外骨骼和可穿戴助力设备: 为人体提供强大的辅助力量。
康复机器人: 安全、柔顺地辅助患者进行康复训练。
假肢: 提供更自然、更有力的运动。
工业自动化: 需要高力、柔顺抓取或操作的场合。
航空航天: 需要高功率密度执行器的场景。
(六)小结
总而言之,液压人工肌肉是一种利用液压流体压力驱动柔性结构产生类似肌肉收缩/伸长运动的执行器,其种类多样,工作机制核心在于通过约束将液压能高效转化为轴向的机械力和位移。它们在高功率密度和柔顺驱动方面具有独特优势,但也面临密封、控制和系统复杂性等挑战。
四、液压人工肌肉适用人形机器人的性能要求和局限性
人形机器人对液压人工肌肉(Hydraulic Artificial Muscle, HAM)的性能要求极为严苛,需在生物相似性、力量密度、能效、环境适应性等多维度达到类人运动水平。尽管近年技术取得显著突破,但实际应用中仍存在关键瓶颈。
(一)人形机器人对液压人工肌肉的核心性能要求
1. 高功率密度与力量输出
爆发力需求:下肢需支撑自重1.5倍以上的动态负载(如跳跃、奔跑),上肢需实现精细抓握(如握手、倒水)。
功率密度:目标需达10 kW/kg以上(超越人体骨骼肌的0.3 kW/kg),以支持快速响应与高动态运动。
2. 运动拟人性与柔顺性
自由度与协调性:需支持200+自由度(如Protoclone机器人),实现多关节协同运动(如行走时髋关节7自由度设计)。
柔顺交互:肌肉需具备被动弹性,避免刚性碰撞(如握手时力度自适应)。
3. 能效与热管理
系统效率:目标>60%(当前电动关节效率>90%,液压仅40%),减少能量损耗与发热。
续航能力:连续工作>6小时(如“行者二号”仿生肌腱方案)。
4. 环境适应性
密封性:水下作业需抗高压泄漏(如水压人工肌肉关节)6;陆地需防油液喷射(如Atlas漏油问题)。
温度耐受:-20℃~80℃工况下性能稳定(如极地/工业场景)。
5. 轻量化与集成度
负载/自重比:目标>10:1(如WLRH-II液压手达10.55:1)。
紧凑性:关节模块需适配人体解剖尺寸(如肩关节三自由度集成)。
液压传动
(二)当前技术对性能要求的满足现状
1. 已实现突破的领域:
1)高生物相似性与动态性能
解剖级复现:Clone Robotics的McKibben肌肉复刻人体206块骨骼与1000+肌纤维,支持自然行走与精细操作(如倒水、握手)。
爆发力优势:液压驱动下肢功率密度达1.42 kW/kg(人体5倍),成功实现跳跃、爬楼梯等高动态动作。
2)负载能力与可靠性
高负载/自重比:哈工大WLRH-II液压手抓握30kg物体(自重2.85kg),负载比10.55:17;Guardian GT外骨骼单臂负载227kg。
工业级耐久:仿生肌腱方案通过100万次屈伸测试零故障1。
3)特殊环境适应性
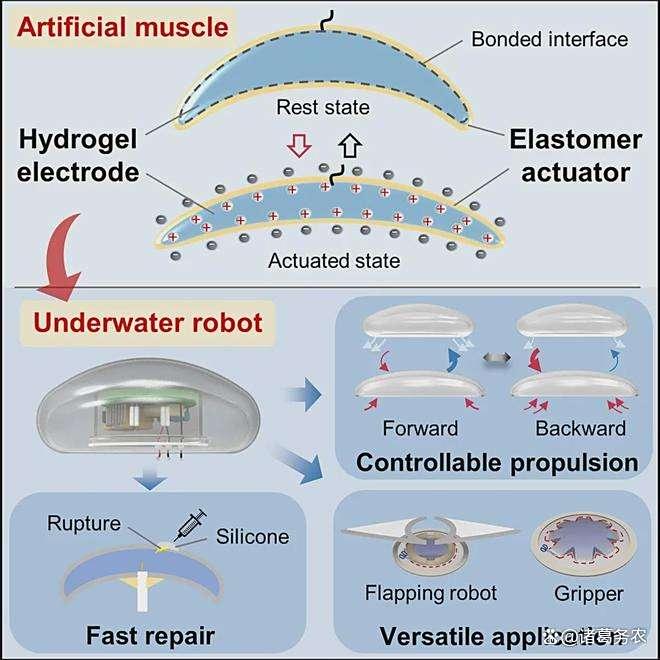
水下驱动:水压人工肌肉关节实现三自由度回转,支持水下机械手作业6;水母状人工肌肉含水量83.3%,实现静音推进。
2. 代表性技术指标对比:

(三)现存不足与技术限制
1. 未解决的关键问题:
1)密封与泄漏
高压泄漏风险:液压轴加工精度需达0.01mm级(电动关节容差0.1mm),偏差易导致油液喷射(调试需穿戴雨衣)
材料老化:长期受压下弹性聚合物易蠕变,密封寿命不足千小时。
2)能效与热管理短板
系统效率低下:液压驱动效率仅40%(电动>90%),能量损耗转化为热能,需强制冷却(如Atlas发热问题)。
泵控系统笨重:500W电动泵占体积大(如Protoclone的“心脏”),限制机器人轻量化。
3)控制复杂性
非线性响应:橡胶材料迟滞导致力控精度下降(如抓握易碎物时力度失准)。
平衡算法局限:双足预测步数仅50步(国外)或10+步(国内),复杂地形易失稳。
4)成本与产业链瓶颈
元件高价:液压轴成本为电动关节的10倍,因精密加工要求高。
产业链缺失:小型化液压阀稀缺,多依赖挖掘机级元件(如辽河实验室面临供应链困境)。
2. 前沿技术突破方向:
材料革新:韩国磁控复合肌肉刚度提升2700倍,承重达自重3690倍,远程控制无迟滞;液态金属人工肌肉(应变87%)实现低电压驱动(0.5-4V),替代传统油压。
结构优化:ExoMuscle仿生肌肉效率达69.11%,功率密度10.94 kW/kg,超越骨骼肌;电液压致动器(油袋+电极)实现自适应性关节,无需外部传感器5。
混合系统:液压-电动融合驱动(如特斯拉Optimus路线),兼顾爆发力与能效。
(四)总结
1. 性能差距与未来需求对比
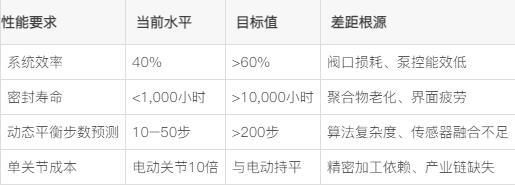
2. 结论:技术现状与未来路径
液压人工肌肉在高生物相似性和爆发力上已接近人形机器人需求(如Protoclone的拟人动作、WLRH-II的负载能力),但在能效、密封可靠性、成本控制三大维度仍存显著短板。未来突破需聚焦:
材料-结构协同创新:液态金属/磁控复合肌肉替代传统油压系统,解决密封与迟滞问题。
混合驱动架构:液压提供瞬时爆发力,电动负责精细控制(如Optimus技术路线)。
仿生优化:ExoMuscle类羽毛状结构实现可变应力,提升自适应能力。
液压人工肌肉在特定场景(高负载、拟人交互)不可替代,但全面普及需等待材料革命与产业链成熟的双重突破。
五、液压人工肌肉材料技术进展及其限制与突破
液压人工肌肉性能高度依赖材料技术的创新与突破。
(一)核心材料组成与技术
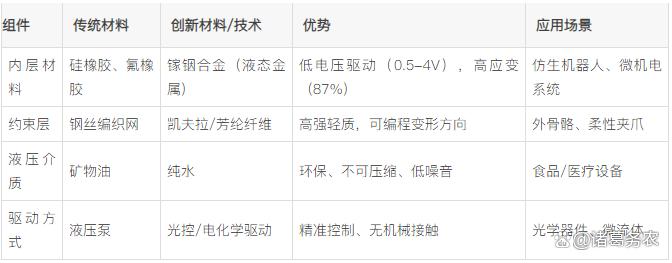
1. 柔性内层材料
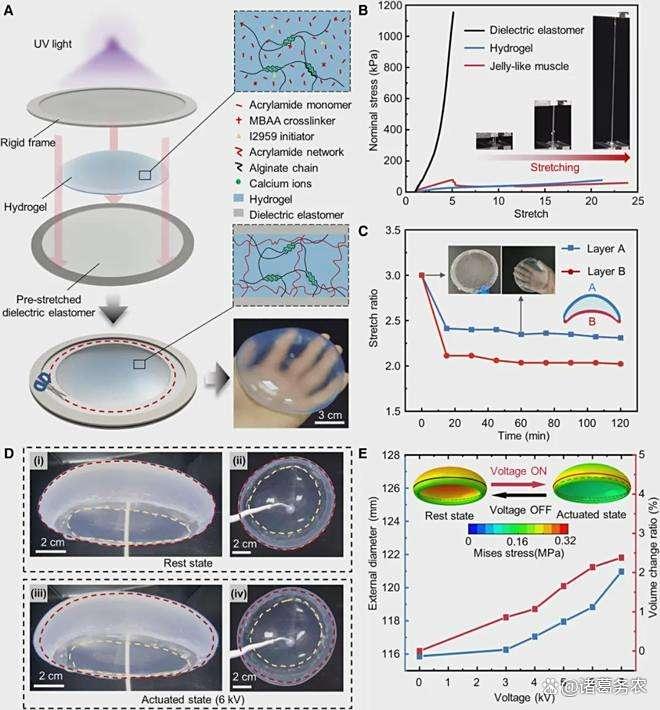
弹性聚合物:如硅橡胶、氟橡胶或丁腈橡胶,构成肌肉的内囊/波纹管,需具备高弹性、耐疲劳性及低渗透性。例如,新型橡胶可在10MPa压力、-60~300℃环境下耐冲击150万次以上。
液态金属内腔:创新技术采用镓铟合金(EGaIn)作为工作介质,通过电化学氧化还原调节表面张力(>600 mN/m→接近0),实现低电压(0.5~4V)驱动,应变高达87%。
2. 外部约束层材料
高强度纤维编织网:如凯夫拉纤维、钢丝或尼龙编织网,包裹内层以限制径向膨胀,将液压能转化为轴向力。编织角度决定变形模式(收缩/伸长)。
结构优化:纤维增强弹性体管(FREE)通过特定角度嵌入纤维,实现可控变形(如螺旋角<54.7°时加压收缩)。
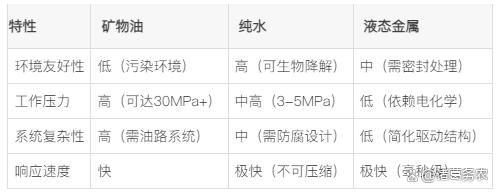
3. 液压介质材料
纯水介质:突破传统矿物油,纯水液压人工肌肉(WHM)具有环保、不可压缩、低噪音等优势,工作压力达3~5MPa(是气动肌肉的6~10倍)。
油性电介质:用于电动液压驱动器,电极施加电压时产生静电收缩力,实现低功耗驱动(如机器人肢体步频>5Hz)。
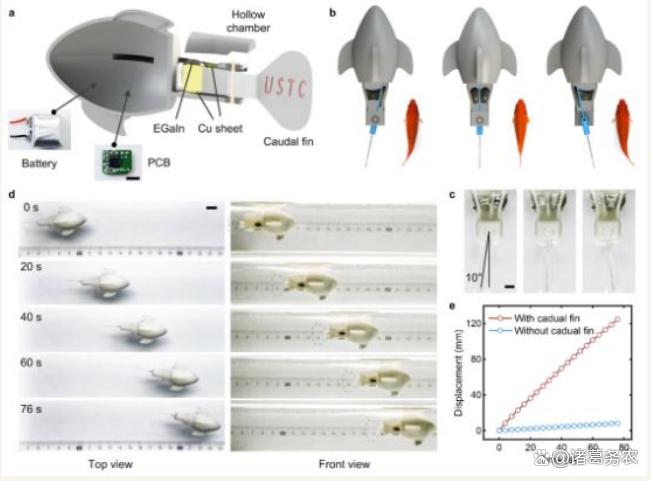
基于液态金属人工肌肉的仿生机器鱼
(二)材料技术的关键限制
1. 密封与泄漏问题
柔性材料长期受压易导致界面密封失效,液态金属需在电解液中封装以防氧化失效。
2. 迟滞与非线性效应
橡胶材料的粘弹性导致力-位移响应滞后,影响控制精度。
3. 腐蚀与磨损
纯水介质加速金属部件腐蚀,需表面镀层(如CrN)或耐蚀合金。
(三)材料技术的创新突破
1. 新型复合材料应用
双层聚合物纤维:MIT开发HDPE/COCe复合纤维,利用热膨胀系数差异实现热驱动收缩(可举自重650倍物体)。
光响应材料:激光激活光电晶体管调控液态金属表面张力,实现无接触精准驱动。
2. 液态金属技术的跨界融合
低电压(0.5V)驱动液态金属液滴形态变化,应用于仿生机器鱼(续航40分钟)和可重构光学器件。
3. 结构设计优化
多单元串并联:提升输出力与行程(如8液滴并联驱动2g物体)。
集成软泵系统:信用卡尺寸柔性泵驱动气动肌肉,推动可穿戴助力设备轻量化。
液压人工肌肉关键材料技术对比
液压人工肌肉介质特性对比
(四)未来材料发展方向
1. 智能材料集成
形状记忆合金(SMA)与液态金属结合,实现多刺激响应(光/电/热)。
2. 仿生结构材料
平面弯曲活性木材(吸水-干燥变形)提供新型生物相容驱动方案。
3. 纳米复合材料
石墨烯增强聚合物提升导热性与力学强度,减少迟滞效应。
(五)总结
液压人工肌肉的材料技术正经历从被动适应到主动响应的变革:
突破点:液态金属实现低功耗驱动,纯水介质提升环保性,复合材料优化力学性能。
瓶颈:密封可靠性、材料迟滞、复杂环境耐久性仍需突破。
趋势:仿生结构、智能材料与微纳技术融合,推动其在医疗机器人、外骨骼及微机电系统中的广泛应用。
未来,随着材料界面科学与多功能集成技术的发展,液压人工肌肉有望在柔性驱动领域实现更高能效与环境适应性。
波士顿Atlas
六、波士顿动力Spot的液压静液传动系统
波士顿动力Spot机器人采用的液压静液传动系统(Hydrostatic Transmission System,HST)是其高动态运动能力的核心,该系统融合了液压驱动的高功率密度与闭环控制的精确性,在四足机器人领域代表了顶尖的工程水平。
(一)系统架构与核心组件
Spot的液压静液传动系统属于闭式回路设计,由以下核心部件构成:
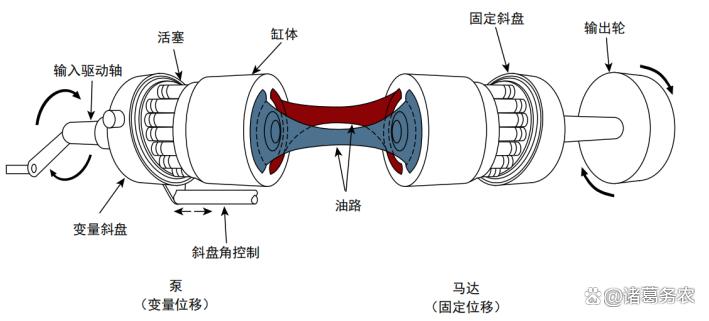
1. 变量泵与液压马达
双向变量泵:由电池驱动的直流电机带动,通过斜盘角度无级调节输出流量和方向57。斜盘角度为0时输出流量为零(空挡状态),正负角度对应正反转。
高速变量马达:接收高压油驱动,输出机械能至关节。Spot的马达排量可调(如107ml至30.8ml),适应不同负载需求。
闭式油路:泵的出油口直连马达进油口,马达回油至泵入口,形成封闭循环,减少油箱体积并提升响应速度。
2. 补油与压力维持系统
补油泵:补偿系统内泄,维持低压侧压力(通常<2MPa),确保主泵吸油充分。
安全阀与蓄能器:高压安全阀限制峰值压力(如30MPa);蓄能器吸收压力脉动,提升系统平稳性。
3. 集成式伺服阀与传感器
定制伺服阀:波士顿动力开发了微型高响应伺服阀,阀芯响应时间<10ms,实现关节力矩的精确控制。
关节传感器:每个液压缸集成力/位置传感器,实时反馈数据至控制系统,构成闭环调节。
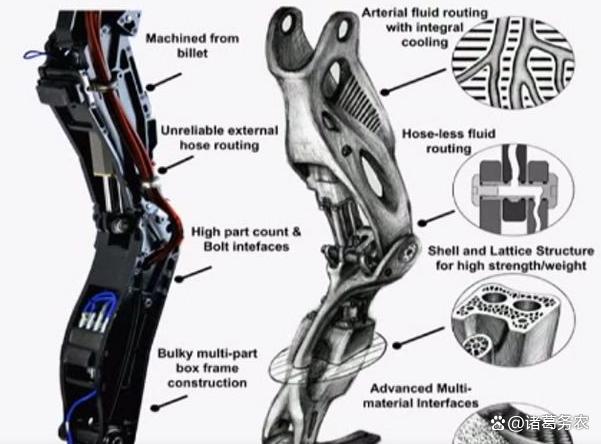
4. 轻量化与紧凑设计
3D打印结构件:液压驱动器与管路嵌入3D打印的钛合金骨架中,减少外置管路,降低泄漏风险并提升空间利用率。
分布式布局:28个液压执行器(对应28个自由度)分散布置于四肢,实现局部动力输出。
人工肌肉在人形机器人外骨骼中的应用
(二)工作原理与动力传递机制
1. 能量转换流程
电池电能 → 电机机械能 → 液压泵液压能 → 液压马达机械能 → 关节运动。在低速高扭矩场景,增大马达排量,输出扭矩提升(如爬坡时扭矩放大8倍);高速低扭矩场景,减小马达排量,提升转速(如奔跑时关节转速达4000rpm)。
2. 无级变速与方向控制
通过调节泵斜盘角度改变流量方向和大小,实现前进/后退的无级调速,无需机械换向机构;转向时,左右侧泵输出差异流量,驱动两侧履带/腿速差(如原地旋转)。
3. 动态平衡与能量回收
被动柔顺性:液压油的压缩性提供天然缓冲,外力冲击时关节弹性变形吸收能量(如被踢后自动复位)
制动能量回收:下坡时马达转为泵模式,将机械能转化为液压能存储于蓄能器,提升能效。
(三)性能特性与工程挑战
1, 关键性能参数(基于公开数据与行业对标):

2. 现存技术瓶颈:
现存技术瓶颈:高压(30MPa)下弹性密封件易老化,千小时后泄漏风险上升,需定期维护。解决方案是采用金属波纹管密封或液态金属填充技术(实验阶段)。
能效与热管理:液压系统效率仅40~45%,能量损耗转化为热能,需强制风冷/液冷(Atlas曾因过热停机)。SpotMini改用全电机驱动,续航提升至90分钟,噪音降低。
非线性控制:油液粘弹性与阀口迟滞导致力控精度下降(如抓握易碎物时过冲);采用混合驱动策略,液压提供爆发力,电机辅助精细调节(如新版Spot的关节模块)。
(四)与电动系统对比及发展趋势
1. 液压与电动驱动比较

2. 技术演进方向
电液融合(如ExoMuscle):将电机嵌入液压缸,实现离散液压+连续电驱的混合控制,效率提升至69%。
智能材料应用:磁流变液替代传统液压油,磁场实时调节粘度,减少迟滞。
分布式泵阀一体:取消中央液压站,每个关节独立微型泵系统(如MIT研究原型)。
(五)结论
波士顿动力Spot的液压静液传动系统是高功率密度与动态响应的典范,通过闭式回路、变量泵/马达和嵌入式3D打印结构,实现了媲美生物肌肉的爆发力(功率密度1.5kW/kg)和抗冲击性。然而,其能效瓶颈(≈45%)和密封可靠性问题促使波士顿动力在SpotMini中转向电驱,未来趋势将是液压-电动混合架构,兼顾高动态与低能耗。静液压技术的革新(如液态金属密封、磁流变液)仍将推动其在军用、灾害救援等极端场景的应用。
通过VR控制机械臂运动
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用了Ai,仅作参考,责任自负。
















)

![[echarts]多个柱状图及图例](http://pic.xiahunao.cn/[echarts]多个柱状图及图例)
