双机并联虚拟同步发电机(VSG)系统中,因线路阻抗不匹配及参数差异,易引发无功环流。本方案在传统VSG控制基础上,引入自适应虚拟阻抗环节。其核心在于:实时检测两机间无功环流分量,据此动态调节各VSG的虚拟阻抗值,等效补偿实际线路阻抗差异,迫使两机输出电压特性趋于一致,从而实现无功功率的自主均分与环流抑制。
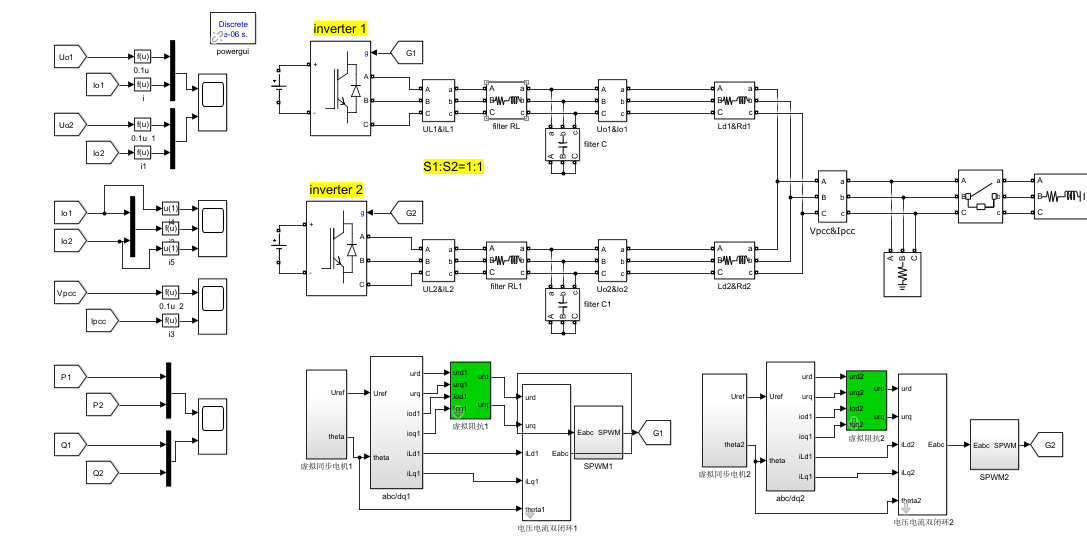
仿真模型核心模块简述:
-
VSG控制:
-
模拟同步发电机机电暂态特性。
-
转子运动方程:实现有功-频率(P-f)下垂及惯性响应。
-
电压调节方程:实现无功-电压(Q-V)下垂控制。
-
输出:基础参考电压指令(幅值
V_mag*,相位角θ*)。
-
-
虚拟阻抗控制(含环流抑制):
-
基础虚拟阻抗:串联于VSG输出端(常为感性),改善功率解耦与稳定性。
-
环流检测:计算两机输出电流差值,提取无功环流分量
ΔI_q。 -
自适应补偿:基于
ΔI_q生成动态虚拟阻抗补偿量ΔZ_v(如PI调节)。 -
合成与压降计算:总虚拟阻抗
Z_v = Z_{v0} + ΔZ_v;计算虚拟压降ΔV_v = Z_v * I_o。 -
输出:修正参考电压
V_ref* = V* - ΔV_v。
-
-
电压电流双闭环控制:
-
外环(电压环):跟踪修正后的
V_ref*,生成电流参考指令I_ref。 -
内环(电流环):快速跟踪
I_ref,生成逆变桥调制信号V_inv_ref。 -
输出:驱动逆变器功率器件的PWM信号。
-
-
锁相环(PLL):
-
精确跟踪公共连接点(PCC)电压相位
θ_{PCC}与频率ω_{PCC}。 -
作用:为VSG同步、坐标变换及控制环路提供相位基准。
-
仿真流程概要: PLL提供同步基准 → VSG生成基础电压指令 → 虚拟阻抗模块依据环流信息动态修正指令 → 双闭环控制精确输出该电压 → 实现并网/并联运行与无功环流抑制。仿真模型旨在验证该控制策略的有效性。
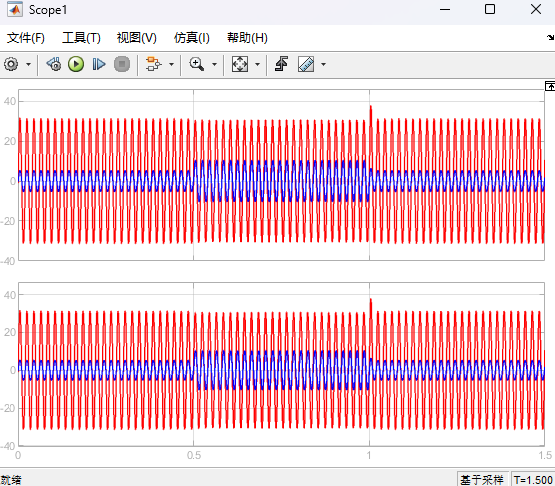
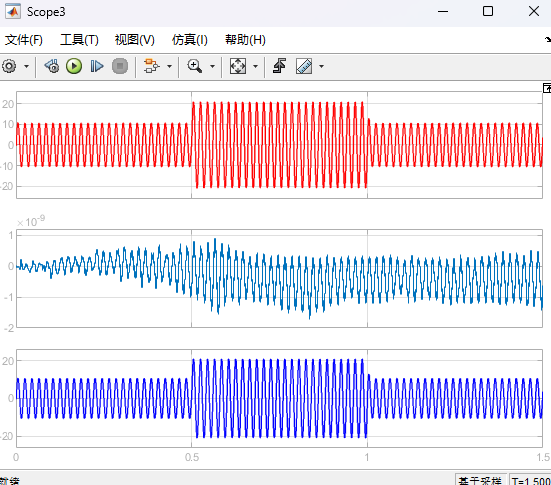
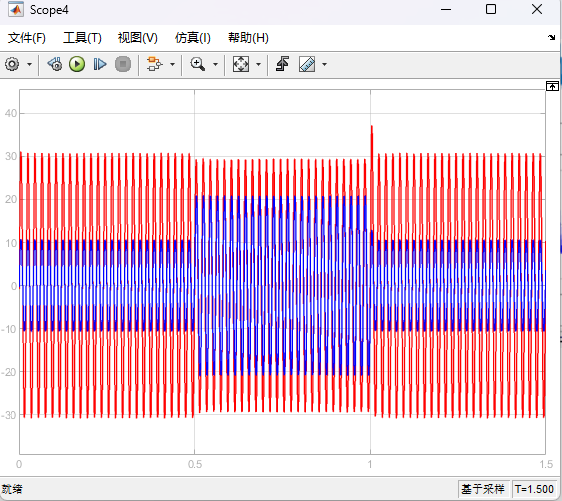
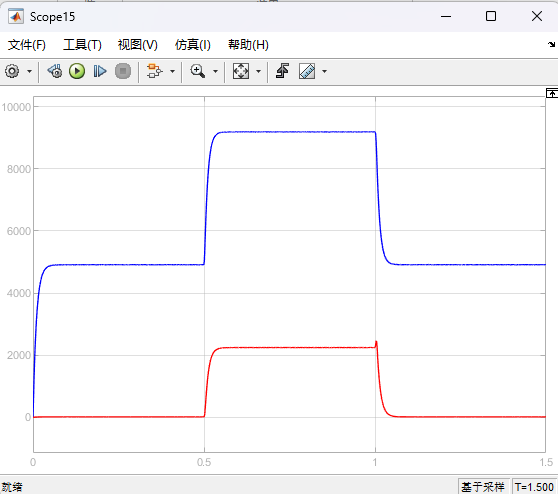
仿真结果:
仿真模型更多详情见原文:
https://mp.weixin.qq.com/s/jpb6Gax5d54IK8zJFwyFdA




)
)

![[硬件电路-115]:模拟电路 - 信号处理电路 - 功能放大器工作分类、工作原理、常见芯片](http://pic.xiahunao.cn/[硬件电路-115]:模拟电路 - 信号处理电路 - 功能放大器工作分类、工作原理、常见芯片)


全面解析)
:部署Kafka消息队列)

)

)



