目录
- 前言
- 一、恒流源电路
- 1.低端反馈
- 2.低端反馈注意事项
- 注意1:电阻Rx
- 注意2:三极管和运放的限制
- 3.高端反馈
- 注意:自激振荡
- 方案二
- 二、直流稳压电源电流
- 1.带反馈
- 2.不带反馈
- 3.区别

前言
基础知识可以看个人笔记:个人笔记
一、恒流源电路
1.低端反馈
下面就是就是一个恒流源的组成电路,其中 I 就是恒定的电流,并且是受Vin的控制的

主要Rf的阻值勾搭,I分流进来的电流就可以忽略不计,那么 I 就是约等于 V/ R
计算还是和运放的计算方法一样:
- V+ = V- = Vin,I = V/R
- 对于结点A:V- * (1/R1 + 1/Rf) - V/Rf = 0
- 两边同时乘以Rf:V- * (Rf/R1 + 1) - V = 0
- 得到V = V- * (Rf/R1 + 1) =Vin * (Rf/R1 + 1)
- 计算得到这里的恒定电流 I = 2 / 4Ω = 0.5A
- 而此时无论Rx的阻值怎么取,I 还是恒定为0.5A,当然也是有限度的


可以看到Rx怎么取,输出的电流都是恒定为0.5A,而输出电压是会随着Rx的变化而变化,这点刚好和之前的恒压源的电路相反
- 恒流源:输出的电流是固定的,但是输出的电压会随着负载的变化而变化
- 恒压源:输出的电压是固定的,但是输出的电流会随着负载的变化而变化
2.低端反馈注意事项
注意1:电阻Rx
电流恒定是有条件的

I实际上是由电压Vx提供的,这不过利用负反馈来让电压变化,从而让V的电压变化,从而让 I 恒定
也就是说前提条件是Rx不能太大,如果太大,那么V根本分不到电压(相当于断路了),实际上输出的电流就是:12➗Rx,根本就不受Vin的控制的
又或者说:输出的恒定电流是1A,那么我Rx要想流过1A,假设Rx是100Ω,那就相当于Rx要有一个100V的电压,而Vx只有12V,这是不可能实现的(忽略掉三极管的最小导通压降)
而考虑上压降的话,也就是说Rx的电压最大只有12-0.7 = 11.3V,这个电路 I 前面计算过恒定是0.5,并且V前面也计算过分压是2V,那么Rx最大就不能超过11.3V➗0.5A - 4Ω= 18.6Ω,超过的话输出的 I 就会变小
注意2:三极管和运放的限制

就图中的三极管,之前学过,三极管其实就是一个电流控制电流型的器件,也就是 Ic = βIb
而假设这里的三极管放大系数β为100,而Rx的恒流要求是10A,那么Ib 就要0.1A,而实际上大多数运放的输出电流最大是不超过50mA的,有一些只有十几mA
并且就算运放能输出50mA,但是三极管一旦从进入饱和区,Ie的电流基本就恒定了,也就是Ic的电流基本恒定了,此时就算Ib电流继续增大,Ic也无法增大了,如下图,Ic是不会一直增大,它最后直接变为平滑,此时不管Uce如何增加,也不会变。而Uce可以认为是等于Ube,此时三极管就相当于开关了,供应的电流想要继续放大就要取决于接在集电极(Ic)的电源的大小了
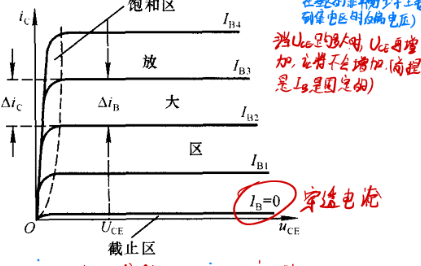

结论就是,在对于这个电路,输出的恒定电流不仅仅取决于运放的最大输出电流(三极管放大区下要继续加大电流就得加大Ib的输入电流),还取决于三极管集电极接的电源的大小(饱和区下要继续增大电流只能通过加大输入电源VCC)
示例:

根据这里可以计算到β差不多就是310,其实还是100,但是这种接法会导致Ic泄流进Ib,和Vout的输出的电流产生抵消
Ic = Ib + Ie,而Ib为0.3mA,可以忽略不记,就可以当作流过探针3的电流几乎来自Ic,而实际上Ic的电流是会受Ib控制的,放大区下:Ib * β = Ic

这时候如果把2Ω的电阻换成0.2Ω,也就是输出的恒定电流会变成10A,但是,实际上并达不到:

最大只有1.82A,这就是因为运放输出的最大电流只有40.6mA,可能这时候会认为是探针3的电阻影响到了,并且R5电阻的电压都不是2V,那把10Ω的电阻调小来看:

可以看到运放最大输出还是只有40.6mA,这时候Ic可以看到已经基本就是310✖Ib > Ic了,已经是一个饱和区的状态了,此时流过R的电阻基本取决于电源VCC,尝试把VCC增大:

可以看到增大到240V,确实可以输出10A了,但实际上显示中,电路中怎么可能有240的电压接入
所以还是一个结论:输出的恒定电流不仅仅取决于运放的最大输出电流(三极管放大区下要继续加大电流就得加大Ib的输入电流),还取决于三极管集电极接的电源的大小(饱和区下要继续增大电流只能通过加大输入电源VCC,当然也可以再接一个三极管继续放大),同时在恒定电流下,接在发射极Rx也不能超过上限

3.高端反馈
反馈是接在了正向输入端
牢记:
- V+ > V-,Vout会增加
- V+ < V-,Vout会减少

接上电源12V后,A、B点的电压是12V,那么V+>V-,Vout输出会增大,同时通过RL反馈给V+,使得V+减小。
直到V+减小到11V和Vref一样,也就是和V-一样的时候,Vout就差不多维持不变了,此时三极管肯定也导通了
当Vout的反馈作用下,V+减压到11V,此时Vout也差不多就增加到恒定值了
示例:

开关没闭合下,可以看到在反馈的作用下,V+从12V会被拉到7.72V,Vout一直增加,输出的电流很大,这时候开关闭合:

发现最后V+就稳定在了11,和V-一样,Vout也下降了
这种接法泄流比较小,因此β是100,基本Ic = 100 * Ib,并且这里的运放是一个理想的运放
注意:自激振荡

按道理稳定后输出应该是恒定不变的,但是实际上会输出一个正弦波,这是因为运放的控制速度比输出的反馈速度快太多了,反馈的速度会跟不上运放的控制速度,最后会导致输出造成正弦波的振荡
**这其实就是经典的巴克豪森振荡条件(Barkhausen Criteria),**振荡出现的两个条件:
- 环路增益 |Aβ| ≥ 1(A 是放大器增益,β 是反馈系数);
- 环路总相位移为 0 或 2π 的整数倍(即“等效正反馈”);
真实运放内部是多级放大电路,存在以下问题:
- 有限增益带宽积(GBW):频率越高,增益越小;
- 存在相位延迟(滞后):输入和输出之间会有滞后;
- 内部电容、电感形成低通或带通特性;
- 高频时,信号反馈回输入端会带上相位差。
当某一频率下,反馈信号落后输入信号 180°,而此时放大器增益刚好 ≥ 1:
- 此时负反馈变成了正反馈!
系统就会开始自激振荡,形成正弦波!
解决方法围绕:
- 反馈跟不上运放的控制速度:加快反馈速度或者减少运放的控制速度
减少运放的控制速度: 选择合适的运放,带足够的相位裕度和增益裕度 ,仿真中就是减少均一增益带宽的频率:

如果不想更换运放,对于这个电路则可以从三极管和反馈入手:

(1)因为A点的电压的下降或者增加的速度,实际上就是由三极管来决定,三极管关断的速度快一些,A点的反馈电压就可以更快增加或者减少,从而跟上运放的控制速度,所以可以更换一个关断速度更快的三极管
(2)或者增加外部频率补偿电容 ,就图中的红色部分是修改后的
-
其中运放的反向输入端和输出会接一个积分电容:
-
- 加入积分电容后,反馈路径在高频时会衰减更多,降低高频增益,增加相位裕度,从而防止振荡(几pF~几十pF)。简单点就是减少输出的速度,高频信号:电容快速充放电 → 相当于“短路” → 信号被短到地了(高频信号被滤掉了一部分)
-
而反馈电阻也会加一个电容,道理也是一样, 这个电容在信号有高频成分时,能让正向输入端也能快速地感知变化
-
- 它让正相输入端的频率响应从原来的“纯电阻参考”变成“有一定频率跟踪能力”;
- 解决输出端所接的三极管开关频率有限导致的反馈频率跟不上运放的控制速度,加快反馈的速度
-
需要注意的是一般正向输入端还要加一个接地电阻,然电容可以泄能,并且反向输入端的Vref要在原来的基础上减少一半,对于B点来说:(1/1 + 1/1)Vb -Va =0,也就是Va = 2Vref,没加之前是Va = Vref
正向输入端串联电阻并联电容(前馈电容)
📌 作用:
- 这个电容会在高频时将输出端的变化“快速注入”正向输入;
- 它 加快了正向输入对输出的“跟踪”能力;
- 本质上也是抑制因反馈慢而产生的振荡,但方式不同——
- 反向积分电容 → 降低反馈增益,减缓运放输出速度;
- 正向前馈电容 → 加快输入端“知情速度”。
反向输入端和输出之间并联积分电容,这是积分型负反馈或称为“相位补偿电容”:
📌 作用:
- 低频时不起作用(截止),不影响放大器DC工作点;
- 高频时导通,形成负反馈“短路”通道;
- 这样高频增益下降、相位裕度增大 → 抑制高频振荡;
- 电容值一般选在几pF~几十nF 之间,根据系统极点频率调整。
一个在“慢下来”,一个在“快起来”,共同作用 → 相位裕度提升,振荡消除。
| 结构 | 作用 | 本质 |
|---|---|---|
| 运放输出 - 反向输入 电容(积分) | 抑制高频增益,防止振荡 | 相位补偿,提高稳定性 |
| 正向输入串电阻并联电容 | 快速响应输出变化,加速反馈 | 提高反馈速度,消除滞后 |
| 更快的三极管 | 加速实际A点电压的变化 | 提高闭环响应速度 |
方案二
采用是一个PNP三极管

由于BE其实就是个二极管,而二极管在导通后是有一个钳位功能的,就是会将电压钳位在0.7V
一开始A的电压肯定还是12V
- 此时b和e之间的电压差是12V,满足二极管的导通条件
- Ie的电流是会流进b的,而由于运放内部是有很大的阻抗的,这就会导致Vout的电压会上升,所以一开始Vout的电流其实是负的(从b流进输出端的)
- 而由于三极管中be的钳位功能,会把电压拉到0.7V,那么Vout的电压上升(并且上升的是比较快的),e的电压也会下降,也就是A点的电压也会慢慢下降;同时运放的输出电流达到最大值后也会开始参与控制,将输出端的电流慢慢拉回去(因为输出端最后的电流其实是不能等于负的)
- 当A点的电压下降到11V,Vout的电压是10.3V的时候,刚好be之间就是0.7V,钳位住了,利用了三极管的钳位功能
- 后续运放作用下,会一直将Vout维持在10.3V
- 此时流进RL的电流也稳定下来了
计算也很简单:
- 而V1=Vref=V2=Va=11
- I = (12-Va)/1=1A

二、直流稳压电源电流
1.带反馈
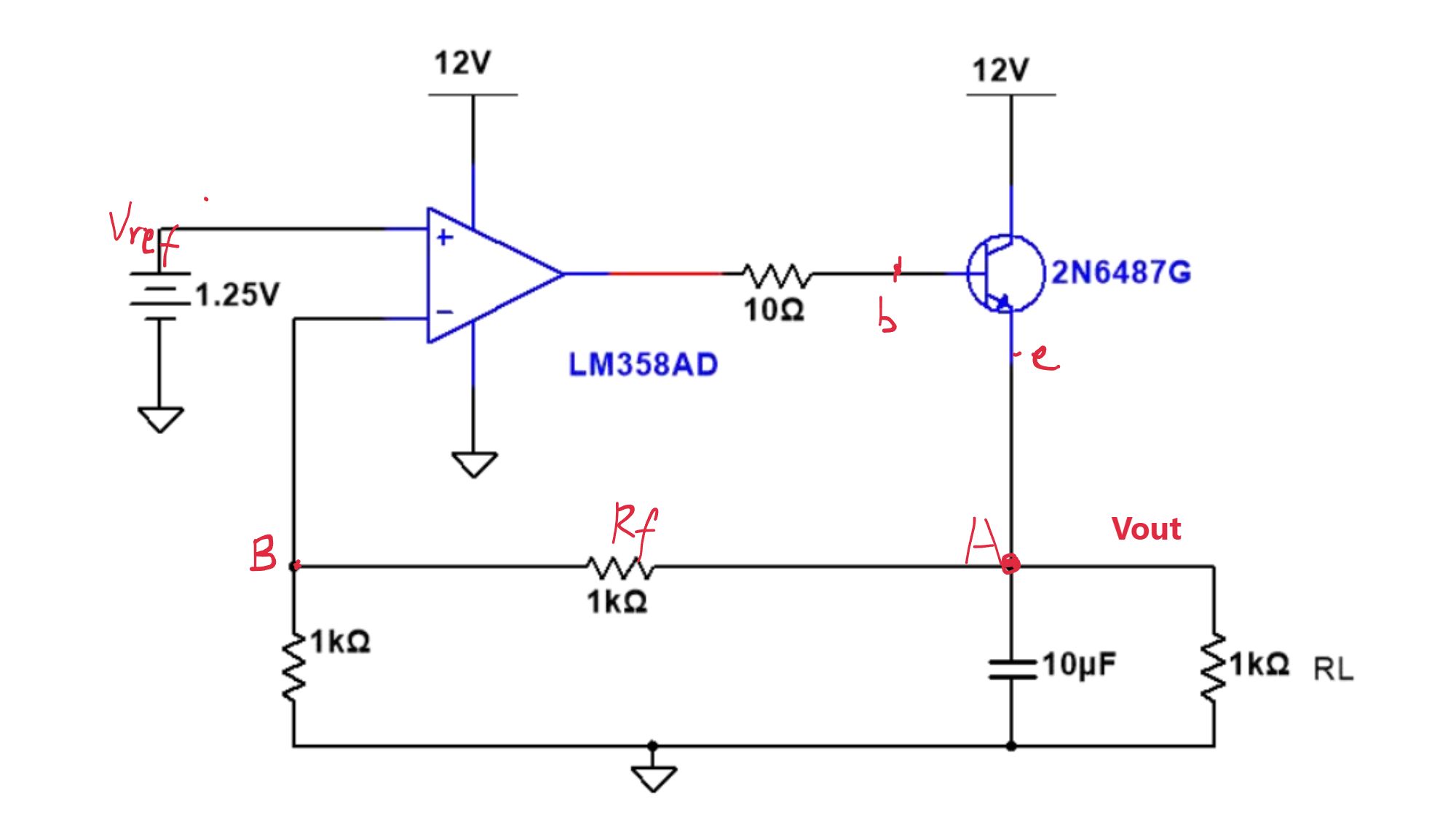
直接推公式:V+ = V- = Vref = Vb
- 对于B点,列结点电压方程:Vb(1/1 + 1/1) - Vout * 1 =0
- Vout = 2Vb = 2Vref = 2.5V
具体的原因还是围绕V+>V-输出增加,V+<V-输出减少
- 当接入Vref的时候,V+为1.25V,V-为0V,那么运放输出端输出会增加
- 而三极管中的钳位作用,be会维持在0.7V,那么当随着b输出电压的增加,e也会增加
- 直到e增加到了2.5V,此时B点分压就是1.25V,和V+相同了,开始维持稳定
- 也就是最后输出一个稳定的电压
2.不带反馈

这种就是有弊端,三极管会发热,用稳压二极管,那么A点就会稳定在5.6V,而由于三极管be的压降功能,C点的电压就是≈5V(或者4.9V),那么此时三极管承受的电压就是12-5=7V的电压,而此时的电路外部负载电流假设为1A,那么三极管就承受7W的功耗
此时三极管是工作于放大状态的(Ub明显大于Ua的,反向偏置,而be之间是正向偏置,符合放大条件)
3.区别
不带反馈:
- 稳压能力差:电压变化依赖于稳压二极管的特性,且 温度漂移较大
- 负载变化时电压波动大
- 输出电流能力依赖于三极管和基极限流电阻
- 反馈路径=无,只能“被动稳定”
- 当负载并联电阻上来,输出的电压会变化,不会重新恢复到要求的电压
带反馈:
- 稳压精度高:取决于参考源和运放精度;
- 负载调整率好:负载电流变化时,反馈及时调整;负载并联电阻进来,输出的电压会变小,内部就将其重新调回目标的电压
- 输出电流能力强(三极管提供电流,运放控制)
- 频率响应可调(通过补偿电容等手段防止震荡)
- 温漂小,输出稳定性高





)


:Scrapy框架)










