containerd 是一个行业标准的容器运行时,专注于简单、健壮的容器执行。它是从 Docker 中分离出来的项目,旨在作为一个底层的运行时接口,供更高层次的容器管理层使用。
containerd 负责镜像传输、存储、容器执行、网络配置等工作。它向上为 Docker 等高级容器管理层提供 API 接口,向下则直接调用操作系统内核特性或通过 runC 来运行容器。
containerd.sock 是由 containerd 自动创建的,前提是 containerd 已经被正确安装、配置并启动。

Docker 使用 containerd 作为其容器运行时的一部分。当你通过 Docker CLI 或 API 发出命令时,这些命令会首先到达 Docker 守护进程(docker daemon),然后 Docker 守护进程可能会通过 gRPC 接口将具体的容器运行任务委派给 containerd 来执行。
1.离线部署docker
详见离线安装 docker 和 docker-compose
2.配置文件
sudo mkdir -p /etc/containerd/
containerd config default | sudo tee /etc/containerd/config.toml
3.系统服务
下载:
https://raw.githubusercontent.com/containerd/containerd/main/containerd.service
cp containerd.service /etc/systemd/system/
chmod +x /etc/systemd/system/containerd.service
# Copyright The containerd Authors.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.[Unit]
Description=containerd container runtime
Documentation=https://containerd.io
After=network.target local-fs.target dbus.service[Service]
#uncomment to enable the experimental sbservice (sandboxed) version of containerd/cri integration
#Environment="ENABLE_CRI_SANDBOXES=sandboxed"
ExecStartPre=-/sbin/modprobe overlay
ExecStart=/usr/bin/containerdType=notify
Delegate=yes
KillMode=process
Restart=always
RestartSec=5
# Having non-zero Limit*s causes performance problems due to accounting overhead
# in the kernel. We recommend using cgroups to do container-local accounting.
LimitNPROC=infinity
LimitCORE=infinity
LimitNOFILE=infinity
# Comment TasksMax if your systemd version does not supports it.
# Only systemd 226 and above support this version.
TasksMax=infinity
OOMScoreAdjust=-999[Install]
WantedBy=multi-user.target
Description:
提供了对该服务单元的简短描述。
在这个例子中,描述为 "containerd container runtime",表示这是一个用于容器运行的 containerd 服务。
Documentation:
提供了指向官方文档的链接,帮助用户了解更多信息。
在这个例子中,链接指向 https://containerd.io。
After:
指定了在启动此服务之前需要启动的其他服务或目标(target)。
在这个例子中,containerd 将在网络 (network.target)、本地文件系统 (local-fs.target) 和 D-Bus (dbus.service) 启动之后再启动。
ExecStartPre:
在启动主进程之前执行的命令。
-/sbin/modprobe overlay 表示尝试加载内核模块 overlay,前面的 - 表示即使该命令失败也不会阻止服务启动。
ExecStart:
指定要启动的主进程命令。
/usr/bin/containerd 是 containerd 守护进程的可执行文件路径。
Type:
定义了服务的启动类型。
notify 表示 containerd 将通过 sd_notify(3) 协议通知 systemd 其启动状态。
Delegate:
允许 containerd 管理自己的 cgroup 层次结构。
yes 表示启用这种行为。
KillMode:
定义了当停止服务时应终止哪些进程。
process 表示仅终止主进程。
Restart:
定义了服务失败时是否以及如何重启。
always 表示无论退出代码是什么,都会重启服务。
RestartSec:
定义了在服务失败后等待多久进行重启。
5 表示等待 5 秒后再重启。
LimitNPROC, LimitCORE, LimitNOFILE:
设置了对进程数、核心转储大小和打开文件描述符数量的限制。
infinity 表示没有限制。
TasksMax:
设置了服务可以创建的最大任务数。
infinity 表示没有限制,但需注意只有 systemd 226 及以上版本支持此设置。
OOMScoreAdjust:
调整服务的 OOM(Out of Memory)分数。
-999 表示尽量避免在内存不足时杀死该服务。
WantedBy:
指定了在哪些目标(target)下该服务单元会被自动启动。
在这个例子中,multi-user.target 是一个常见的 systemd target,代表多用户模式(即非图形界面的完整系统启动状态)。这意味着当你运行 systemctl enable containerd.service 时,containerd 服务将在系统进入多用户模式时自动启动。
4.启动服务
sudo systemctl daemon-reload
sudo systemctl start containerd
5.设置开机启动
sudo systemctl enable containerd
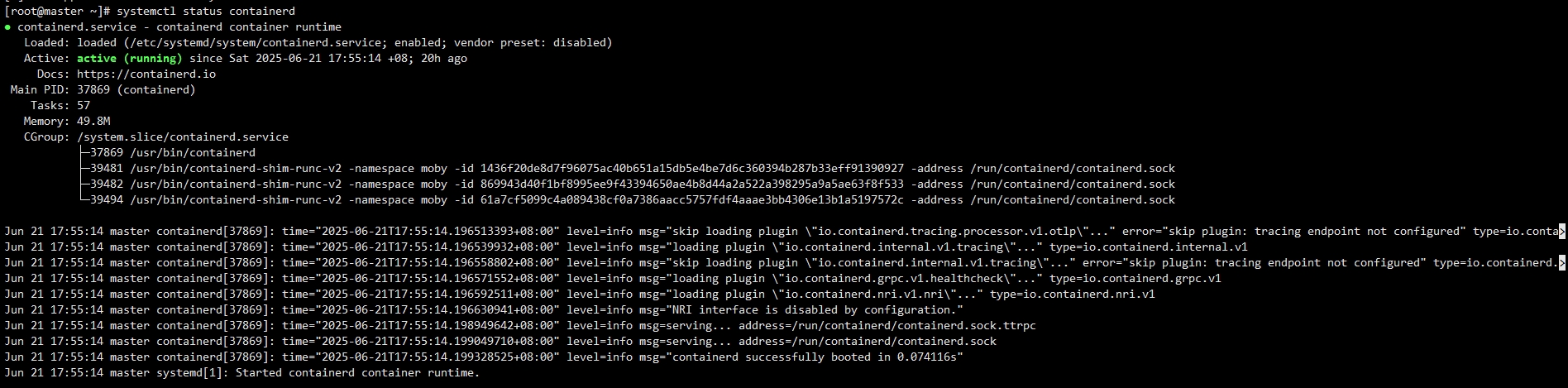
6.服务状态
sudo systemctl status containerd


:基于RAG的法律助手项目(上):总体流程简易实现)






)
Aerotech.A3200名空间)







详解)
