引言
2025 年 8 月 8 日,北京再一次成为全球瞩目的科技焦点——世界机器人大会盛大开幕。来自全球的 200 余家顶尖企业齐聚一堂,带来超过 1500 件展品,其中首发新品突破 100 款,涵盖了从工业制造、医疗康复到服务陪伴、特种作业的方方面面。外骨骼机器人、人形机器人、家庭服务机器人、冰壶竞技机器人等轮番亮相,不仅展示了令人惊叹的技术突破,也勾勒出未来社会中“人机共生”的图景。
然而,热闹的展览背后,更值得行业深思的,是机器人真正走向产业落地的关键条件。**智能的未来并不仅仅依赖大模型与 AI 算法的能力迭代,更要扎根于机构学的突破与感知链路的工程化实现。**正如人体的运动离不开骨骼与神经系统的协同,机器人也需要精密的结构支撑、可靠的控制逻辑以及稳定低延迟的感知通道,才能完成复杂场景中的自主行为。这其中,大牛直播SDK所提供的跨平台、低延迟视频链路,正成为“机器人 × 视频感知”闭环中不可或缺的基础设施。
01 大会亮点企业产品聚焦
(一)傲鲨智能 —— 外骨骼机器人的刚柔并济
Android平台RTSP播放器时延测试
在展会现场,傲鲨智能带来的 外骨骼机器人 VIATRIX 成为焦点。其 FLOAT 360 浮动式髋关节架构与高响应电机设计,使穿戴者在行走、奔跑、上台阶时动作自然流畅,仿佛将人体的力量进行了二次放大。
更值得关注的是,傲鲨并未仅依赖 AI 步态模型来优化动作,而是通过 精密机构学设计 + 实时力反馈感知,让机器人能够主动适应螺丝松紧、地面阻力等复杂条件。这种“能学会学习”的设计理念,让外骨骼真正具备产业应用价值。
在此类场景中,视频与力控的实时同步尤为关键。例如在工业搬运、康复训练中,远程医生或工程师需要通过低延迟视频实时观察用户动作,大牛直播SDK的 RTSP 低延迟链路(100–200ms)恰好为这类“人机协作”提供了坚实的视觉基础,确保动作与反馈高度同步。
(二)星尘智能 —— 服务机器人的拟人化适应
星尘智能的 S1 服务机器人 以“design for AI”为核心亮相,创新的绳驱传动让其运动模式更接近人类肌肉收缩方式。通过自研控制算法,S1 能以 毫秒级延迟 复刻人类的细微动作,即便面对未知物体,也能快速调整策略完成任务。
这背后其实是 实时感知链路与 AI 决策的高效耦合。S1 需要随时“看见”环境并传递到模型端,才能动态决策。如果视频延迟过高,机器人会出现“指令滞后”或“错误执行”。在这一环节,大牛直播SDK的 跨平台视频采集与播放能力,为机器人提供了“眼到脑”的高速通道,让 AI 模型真正能在实时环境下发挥作用。
(三)星海图 —— 家庭机器人进入柔性任务时代
Android平台Unity共享纹理模式RTMP播放延迟测试
星海图展示的 R1 Lite 机器人,可以在嘈杂、随机的卧室环境中完成铺床任务。支撑这一演示的,是其即将推出的 VLA 基础模型 G0,首次实现了端到端全身运动控制的柔性任务执行。
这类长程任务对视频链路的要求更高:机器人需要持续捕捉环境信息,边感知边调整动作。如果视觉延迟过大,机器人会“铺错方向”甚至陷入停滞。此类场景正是大牛直播SDK Unity3D 跨平台播放器的用武之地,它能保证在 Windows、Linux、Android、iOS 等终端统一实现低延迟渲染,使家庭机器人在动态环境中依然表现稳定。
(四)傅利叶 —— 打造有温度的人形交互
Android平台RTMP直播播放器延迟测试
傅利叶科技在大会上展示的 GR-3 人形机器人,以“温暖科技”为核心理念,引起了大量观众互动。它采用柔肤软包与莫兰迪暖色系外观设计,配合 55 个自由度,使其在动作和表情传达上更接近人类。其自研的 全感交互系统 集成了听觉、视觉和触觉模块,头部麦克风阵列实现声源定位,结构光 + RGB 摄像头完成精准人脸识别,31 个触觉传感器实时感知外部环境。
这种多模态感知不仅仅是硬件堆叠,更要求感知信息在毫秒级内被同步处理。尤其在远程教育、陪伴、康复训练场景中,视频通道的低延迟直接决定交互是否自然。大牛直播SDK的 RTSP/RTMP 播放与推流能力,为 GR-3 这类人形机器人提供了高实时性的视频支撑,让远程端用户可以即时看到机器人反馈,也让机器人能通过低延迟视频捕捉用户微表情,实现更拟人化的情感交互。
(五)宇树科技 —— 极限动作与动态平衡
安卓轻量级RTSP服务采集摄像头,PC端到安卓拉取RTSP流
宇树科技带来的 G1 格斗款人形机器人 成为大会的焦点。其凌厉的出拳、高踢腿动作在现场赢得阵阵掌声。更关键的是,当机器人因高速动作而意外摔倒时,它依然能通过 动态平衡算法 实现自主恢复,展现出接近人类的运动协调性。
此外,宇树还发布了轻量化的人形机器人 R1,重量仅约 25kg,售价不足 4 万元,并开放 EDU 开发者版本接口,吸引了科研机构和高校广泛关注。
在这种高动态场景中,实时视频链路的重要性被放大。格斗表演或科研试验需要远程操控和观察,任何超过 500ms 的视频延迟都会导致操控滞后,甚至引发安全问题。大牛直播SDK的 100–200ms 端到端延迟,在保证高清视频质量的同时,使得远程操控与机器人动作几乎保持同步,为科研试验和开发平台提供了可靠的“视频神经元”。
小结
从傲鲨的外骨骼,到星尘的服务机器人,再到星海图的家庭机器人、傅利叶的情感交互,以及宇树的人形格斗表演,本届大会展示了机器人在 机构学突破、AI 算法进化与实时感知链路优化 三个维度的融合趋势。
而在这其中,大牛直播SDK以跨平台、低延迟、可扩展的视频链路,为机器人产业的“感知与执行闭环”提供了坚实的底层支撑。
02 未来机器人板块前景展望
(一)技术融合驱动性能飞跃
从本届大会可以明显看出,机器人正处在“多技术耦合”的加速阶段:AI 大模型、具身智能、力控算法与新型传感器、高能量密度电池、精密减速器等核心技术快速迭代,正在共同推动机器人性能实现质的飞跃。
例如,灵巧手的精细化操作、双足机器人的动态平衡行走,都对感知和控制链路提出了更高要求。这里,低延迟视频链路是不可或缺的一环:大牛直播SDK通过 跨平台 RTSP/RTMP/GB28181 支撑,确保机器人在复杂场景中“所见即所感”,让 AI 模型能够实时响应环境变化,而非滞后数秒后才做出决策。
(二)政策支持注入发展动力
全球主要经济体均将机器人产业列为战略高地,我国的“制造强国战略”更是明确提出重点支持 人形机器人创新与智能制造应用。在税收优惠、研发补贴、首台套保险等政策工具推动下,机器人企业的研发门槛正在不断降低。
与此同时,政策也在推动 视频链路与 AI 的标准化融合,例如智能制造示范工厂、智慧医疗试点,均要求具备跨平台视频互通能力。大牛直播SDK的模块化能力(轻量级 RTSP 服务、RTSP 转 RTMP 推送、多路转发)能够快速嵌入不同系统架构,帮助企业符合标准化要求,加速应用落地。
(三)成本下降促进市场渗透
随着核心零部件(减速器、电机、传感器)的国产化,机器人整机价格不断下探。例如宇树科技的 R1 人形机器人起售价仅 3.99 万元,已接近“消费级电子产品”的水平。
但在“降本增效”的同时,机器人依然需要高可靠的视频链路来保证任务执行。大牛直播SDK通过 轻量化部署(嵌入式 Linux/Android 模块),让机器人即便在低成本硬件条件下,也能维持 100–200ms 的低延迟传输,避免因为延迟过高而丧失应用价值。
(四)应用场景拓展创造无限可能
-
工业领域:新能源汽车、光伏、半导体等行业需要柔性生产,工业机器人和移动机器人(AMR)正在快速普及。大牛直播SDK可为 产线远程监控与异常检测 提供低延迟视频支撑。
-
医疗康复:远程康复训练、手术辅助机器人需要实时可控的视频链路。SDK 的 RTSP/RTMP 播放器保证画面与动作高度同步。
-
服务与特种机器人:安防巡检、清洁配送、农业生产机器人依赖跨平台视频传输。SDK 的 多协议兼容能力(RTSP、HTTP-FLV、GB28181)让机器人可无缝对接不同系统。
-
极端环境:太空作业、深海探索、灾难救援机器人更强调实时性和可靠性。SDK 的 自研内核 在弱网环境下保持稳定,满足高危场景对通信链路的严苛要求。
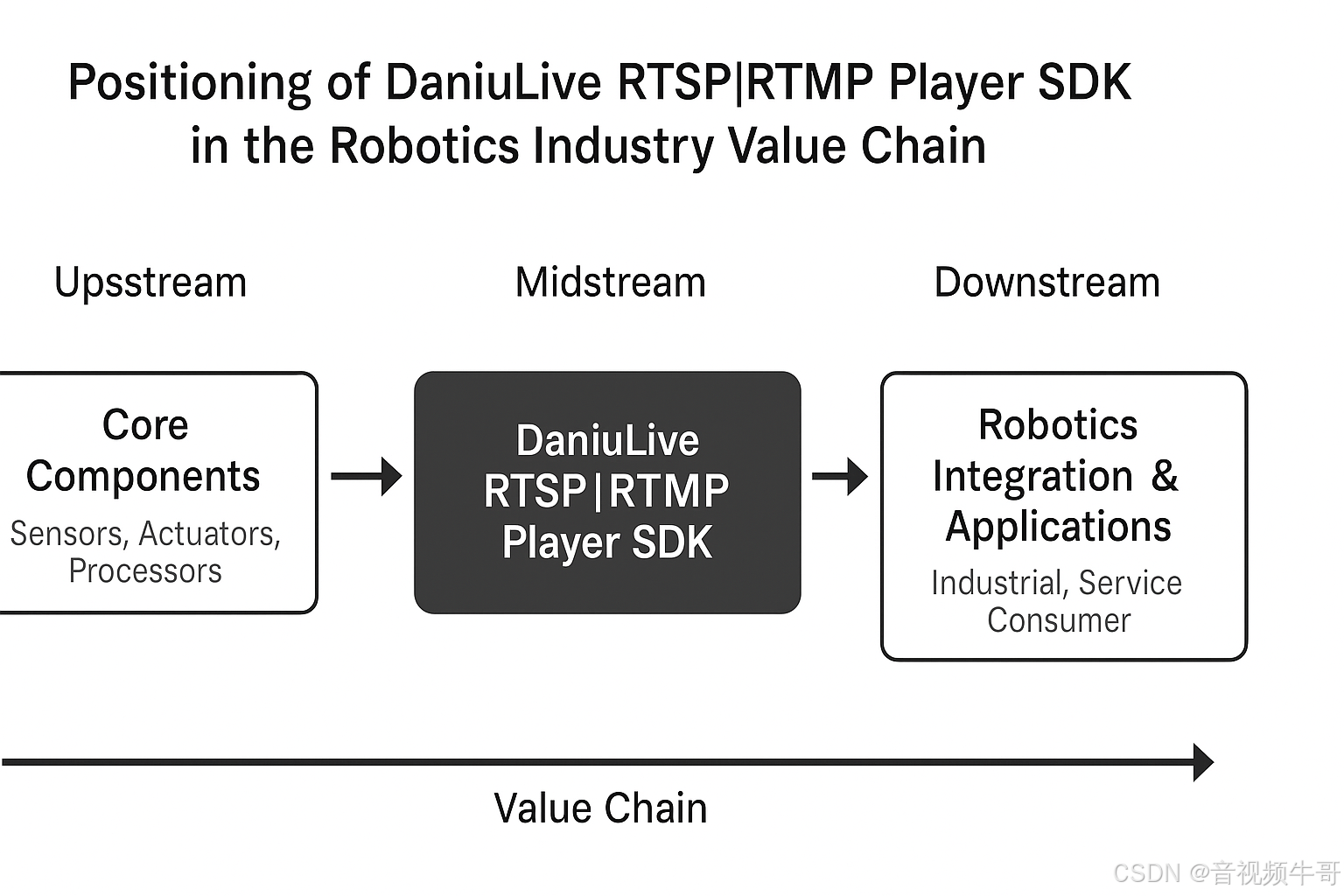
(五)产业链价值重构与分化
未来机器人产业链的价值将重构:
-
上游:掌握核心零部件的供应商(减速器、传感器)。
-
中游:具备系统集成与量产能力的整机厂商。
-
下游:深耕垂直场景并提供整体解决方案的服务商。
在这一过程中,具备跨平台、模块化视频内核的厂商将获得额外溢价。因为机器人在各个场景中都需要“实时视频输入输出”作为通用基础,大牛直播SDK正是这种 横跨上下游的通用基础设施,既能赋能上游测试验证,也能嵌入中游整机产品,还能成为下游应用解决方案的一部分。
结语
2025 世界机器人大会不仅展示了产业的热闹表象,更让我们清晰地看到:机器人智能的未来在于三重驱动——机构学的突破、AI 算法的进化,以及低延迟视频链路的工程化落地。
大牛直播SDK,作为跨平台低延迟视频内核,正在成为机器人“视觉神经元”的关键基座。从工业到医疗,从服务到特种场景,它让机器人不仅能“动”,还能“看清、看准、快速决策”,真正完成感知 → 决策 → 执行的闭环。
未来,机器人板块的繁荣,离不开这种 底层通信与感知的持续优化。而大牛直播SDK,正是在这场进化中,提供最具价值的底层支撑。
📎 CSDN官方博客:音视频牛哥-CSDN博客


)







)



- DRM简介)

C++入门(下))


