一、 主机驱动与外设驱动分离
Linux中的SPI、I2c、USB等子系统都利用了典型的把主机驱动和外设驱动分离的想法,让主机端负责产生总线上的传输波形,而外设端只是通过标准的API来让主机端以适当的波形访问自身。因此这里涉及了4个软件模块:
1)主机端的驱动。根据具体的I2c、SPI、USB等控制器的硬件的手册,操作具体的i2c、SPI、USB等控制器,产生总线的各种波形。
2)连接主机和外设的纽带。外设不直接调用主机端的驱动来产生波形,而是调一个标准的API。由这个标准的API把这个波形的传输请求间接“转发”给具体的主机端驱动。当然,在这里,最好把关于波形的描述也以某种数据结构标准化。
3)外设端的驱动。外设接在I2c、SPI、USB这样的总线上,但是它们本身可以是触摸屏、网卡、声卡或者任意一种类型的设备。我们在相关的i2c_driver、spi_driver、usb_driver这种xxx_driver的probe()函数中注册具体的类型。当这些外设要去i2c、spi、usb等去访问它的时候,它调用“连接主机和外设的纽带”模块的标准API。
4)板级逻辑。板级逻辑用来描述主机和外设是如何互联,它相当于一个“路由表”。假设板子上有多个SPI控制器和多个SPI外设,那究竟谁接在谁上面?管理互联关系,既不是主机端的责任,也不是外设端的责任,这属于板级逻辑的责任。这部分通常在arch/arm/mach-xx或者arch/arm/boot/dts下面。
什么叫良好的软件设计?一言以蔽之,让正确的代码出现在正确的位置。不要在错误的时间、错误的地点,编写一段错位的代码。在LKML中,关于代码出现在错误的位置,常见的台词是代码“out of place”。
二、 linux SPI主机和设备驱动
在linux中,用代码的spi_maste结构体来描述一个spi主机控制器驱动,其主要成员是主机控制器的序号(系统中可能存在多个SPI主机控制器)、片选数量、SPI模式、时钟设置用到的和数据传输用到的函数等。

521 struct spi_controller {522 struct device dev;523 524 struct list_head list;525 526 /*527 * Other than negative (== assign one dynamically), bus_num is fully528 * board-specific. Usually that simplifies to being SoC-specific.529 * example: one SoC has three SPI controllers, numbered 0..2,530 * and one board's schematics might show it using SPI-2. Software531 * would normally use bus_num=2 for that controller.532 */533 s16 bus_num;534 535 /*536 * Chipselects will be integral to many controllers; some others537 * might use board-specific GPIOs.538 */539 u16 num_chipselect;540 541 /* Some SPI controllers pose alignment requirements on DMAable542 * buffers; let protocol drivers know about these requirements.543 */544 u16 dma_alignment;545 546 /* spi_device.mode flags understood by this controller driver */547 u32 mode_bits;548 549 /* spi_device.mode flags override flags for this controller */550 u32 buswidth_override_bits;551 552 /* Bitmask of supported bits_per_word for transfers */553 u32 bits_per_word_mask;554 #define SPI_BPW_MASK(bits) BIT((bits) - 1)555 #define SPI_BPW_RANGE_MASK(min, max) GENMASK((max) - 1, (min) - 1)556 557 /* Limits on transfer speed */558 u32 min_speed_hz;559 u32 max_speed_hz;560 561 /* Other constraints relevant to this driver */562 u16 flags;563 #define SPI_CONTROLLER_HALF_DUPLEX BIT(0) /* Can't do full duplex */564 #define SPI_CONTROLLER_NO_RX BIT(1) /* Can't do buffer read */565 #define SPI_CONTROLLER_NO_TX BIT(2) /* Can't do buffer write */566 #define SPI_CONTROLLER_MUST_RX BIT(3) /* Requires rx */567 #define SPI_CONTROLLER_MUST_TX BIT(4) /* Requires tx */568 #define SPI_CONTROLLER_GPIO_SS BIT(5) /* GPIO CS must select slave */569 #define SPI_CONTROLLER_SUSPENDED BIT(6) /* Currently suspended */570 571 /* Flag indicating if the allocation of this struct is devres-managed */572 bool devm_allocated;573 574 union {575 /* Flag indicating this is an SPI slave controller */576 bool slave;577 /* Flag indicating this is an SPI target controller */578 bool target;579 };580 581 /*582 * On some hardware transfer / message size may be constrained583 * the limit may depend on device transfer settings.584 */585 size_t (*max_transfer_size)(struct spi_device *spi);586 size_t (*max_message_size)(struct spi_device *spi);587 588 /* I/O mutex */589 struct mutex io_mutex;590 591 /* Used to avoid adding the same CS twice */592 struct mutex add_lock;593 594 /* Lock and mutex for SPI bus locking */595 spinlock_t bus_lock_spinlock;596 struct mutex bus_lock_mutex;597 598 /* Flag indicating that the SPI bus is locked for exclusive use */599 bool bus_lock_flag;600 601 /*602 * Setup mode and clock, etc (SPI driver may call many times).603 *604 * IMPORTANT: this may be called when transfers to another605 * device are active. DO NOT UPDATE SHARED REGISTERS in ways606 * which could break those transfers.607 */608 int (*setup)(struct spi_device *spi);609 610 /*611 * set_cs_timing() method is for SPI controllers that supports612 * configuring CS timing.613 *614 * This hook allows SPI client drivers to request SPI controllers615 * to configure specific CS timing through spi_set_cs_timing() after616 * spi_setup().617 */618 int (*set_cs_timing)(struct spi_device *spi);619 620 /*621 * Bidirectional bulk transfers622 *623 * + The transfer() method may not sleep; its main role is624 * just to add the message to the queue.625 * + For now there's no remove-from-queue operation, or626 * any other request management627 * + To a given spi_device, message queueing is pure FIFO628 *629 * + The controller's main job is to process its message queue,630 * selecting a chip (for masters), then transferring data631 * + If there are multiple spi_device children, the i/o queue632 * arbitration algorithm is unspecified (round robin, FIFO,633 * priority, reservations, preemption, etc)634 *635 * + Chipselect stays active during the entire message636 * (unless modified by spi_transfer.cs_change != 0).637 * + The message transfers use clock and SPI mode parameters638 * previously established by setup() for this device639 */640 int (*transfer)(struct spi_device *spi,641 struct spi_message *mesg);642 643 /* Called on release() to free memory provided by spi_controller */644 void (*cleanup)(struct spi_device *spi);645 646 /*647 * Used to enable core support for DMA handling, if can_dma()648 * exists and returns true then the transfer will be mapped649 * prior to transfer_one() being called. The driver should650 * not modify or store xfer and dma_tx and dma_rx must be set651 * while the device is prepared.652 */653 bool (*can_dma)(struct spi_controller *ctlr,654 struct spi_device *spi,655 struct spi_transfer *xfer);656 struct device *dma_map_dev;657 struct device *cur_rx_dma_dev;658 struct device *cur_tx_dma_dev;659 660 /*661 * These hooks are for drivers that want to use the generic662 * controller transfer queueing mechanism. If these are used, the663 * transfer() function above must NOT be specified by the driver.664 * Over time we expect SPI drivers to be phased over to this API.665 */666 bool queued;667 struct kthread_worker *kworker;668 struct kthread_work pump_messages;669 spinlock_t queue_lock;670 struct list_head queue;671 struct spi_message *cur_msg;672 struct completion cur_msg_completion;673 bool cur_msg_incomplete;674 bool cur_msg_need_completion;675 bool busy;676 bool running;677 bool rt;678 bool auto_runtime_pm;679 bool cur_msg_mapped;680 char last_cs;681 bool last_cs_mode_high;682 bool fallback;683 struct completion xfer_completion;684 size_t max_dma_len;685 686 int (*prepare_transfer_hardware)(struct spi_controller *ctlr);687 int (*transfer_one_message)(struct spi_controller *ctlr,688 struct spi_message *mesg);689 int (*unprepare_transfer_hardware)(struct spi_controller *ctlr);690 int (*prepare_message)(struct spi_controller *ctlr,691 struct spi_message *message);692 int (*unprepare_message)(struct spi_controller *ctlr,693 struct spi_message *message);694 union {695 int (*slave_abort)(struct spi_controller *ctlr);696 int (*target_abort)(struct spi_controller *ctlr);697 };698 699 /*700 * These hooks are for drivers that use a generic implementation701 * of transfer_one_message() provided by the core.702 */703 void (*set_cs)(struct spi_device *spi, bool enable);704 int (*transfer_one)(struct spi_controller *ctlr, struct spi_device *spi,705 struct spi_transfer *transfer);706 void (*handle_err)(struct spi_controller *ctlr,707 struct spi_message *message);708 709 /* Optimized handlers for SPI memory-like operations. */710 const struct spi_controller_mem_ops *mem_ops;711 const struct spi_controller_mem_caps *mem_caps;712 713 /* GPIO chip select */714 struct gpio_desc **cs_gpiods;715 bool use_gpio_descriptors;716 s8 unused_native_cs;717 s8 max_native_cs;718 719 /* Statistics */720 struct spi_statistics __percpu *pcpu_statistics;721 722 /* DMA channels for use with core dmaengine helpers */723 struct dma_chan *dma_tx;724 struct dma_chan *dma_rx;725 726 /* Dummy data for full duplex devices */727 void *dummy_rx;728 void *dummy_tx;729 730 int (*fw_translate_cs)(struct spi_controller *ctlr, unsigned cs);731 732 /*733 * Driver sets this field to indicate it is able to snapshot SPI734 * transfers (needed e.g. for reading the time of POSIX clocks)735 */736 bool ptp_sts_supported;737 738 /* Interrupt enable state during PTP system timestamping */739 unsigned long irq_flags;740 741 /* Flag for enabling opportunistic skipping of the queue in spi_sync */742 bool queue_empty;743 bool must_async;744 };分配、注册和注销SPI主机的API由SPI核心提供:

在linux中,用代码清单的spi_driver结构体来描述一个SPI外设驱动,这个外设驱动可以认为是spi_master的客户端驱动。
325 struct spi_driver {326 const struct spi_device_id *id_table;327 int (*probe)(struct spi_device *spi);328 void (*remove)(struct spi_device *spi);329 void (*shutdown)(struct spi_device *spi);330 struct device_driver driver;331 };可以看出,spi_driver结构体和platform_driver结构体有极大的相似性,都有probe()、remove()、suspend()、resume()这样都接口和device_driver都实例。这几乎是一切客户端驱动常模板。
在SPI外设驱动中,当通过SPI总线进行数据传输都时候,使用了一套与CPU无关的统一的接口。这套接口的第1个关键数据结构就是spi_transfer,它用于描述SPI传输,如下所示:
1030 struct spi_transfer {
1031 /*
1032 * It's okay if tx_buf == rx_buf (right?).
1033 * For MicroWire, one buffer must be NULL.
1034 * Buffers must work with dma_*map_single() calls, unless
1035 * spi_message.is_dma_mapped reports a pre-existing mapping.
1036 */
1037 const void *tx_buf;
1038 void *rx_buf;
1039 unsigned len;
1040
1041 #define SPI_TRANS_FAIL_NO_START BIT(0)
1042 u16 error;
1043
1044 dma_addr_t tx_dma;
1045 dma_addr_t rx_dma;
1046 struct sg_table tx_sg;
1047 struct sg_table rx_sg;
1048
1049 unsigned dummy_data:1;
1050 unsigned cs_off:1;
1051 unsigned cs_change:1;
1052 unsigned tx_nbits:3;
1053 unsigned rx_nbits:3;
1054 unsigned timestamped:1;
1055 #define SPI_NBITS_SINGLE 0x01 /* 1-bit transfer */
1056 #define SPI_NBITS_DUAL 0x02 /* 2-bit transfer */
1057 #define SPI_NBITS_QUAD 0x04 /* 4-bit transfer */
1058 u8 bits_per_word;
1059 struct spi_delay delay;
1060 struct spi_delay cs_change_delay;
1061 struct spi_delay word_delay;
1062 u32 speed_hz;
1063
1064 u32 effective_speed_hz;
1065
1066 unsigned int ptp_sts_word_pre;
1067 unsigned int ptp_sts_word_post;
1068
1069 struct ptp_system_timestamp *ptp_sts;
1070
1071 struct list_head transfer_list;
1072 };而一次完整的SPI传输流程可能不是只包含spi_transfer,它可能包含一个或多个spi_transfer,这些spi_transfer最终通过spi_message组织在一起。
1107 struct spi_message {
1108 struct list_head transfers;
1109
1110 struct spi_device *spi;
1111
1112 unsigned is_dma_mapped:1;
1113
1114 /* spi_prepare_message() was called for this message */
1115 bool prepared;
1116
1117 /*
1118 * REVISIT: we might want a flag affecting the behavior of the
1119 * last transfer ... allowing things like "read 16 bit length L"
1120 * immediately followed by "read L bytes". Basically imposing
1121 * a specific message scheduling algorithm.
1122 *
1123 * Some controller drivers (message-at-a-time queue processing)
1124 * could provide that as their default scheduling algorithm. But
1125 * others (with multi-message pipelines) could need a flag to
1126 * tell them about such special cases.
1127 */
1128
1129 /* Completion is reported through a callback */
1130 int status;
1131 void (*complete)(void *context);
1132 void *context;
1133 unsigned frame_length;
1134 unsigned actual_length;
1135
1136 /*
1137 * For optional use by whatever driver currently owns the
1138 * spi_message ... between calls to spi_async and then later
1139 * complete(), that's the spi_controller controller driver.
1140 */
1141 struct list_head queue;
1142 void *state;
1143
1144 /* List of spi_res resources when the SPI message is processed */
1145 struct list_head resources;
1146
1147 /* For embedding transfers into the memory of the message */
1148 struct spi_transfer t[];
1149 };通过spi_message_init()可以初始化spi_message,而将spi_transfer添加到spi_message队列的方法则是:

发起一次spi_message的传输有同步和异步两种方式,使用同步API时,会阻塞等待这个消息被处理完。同步操作时使用的API是: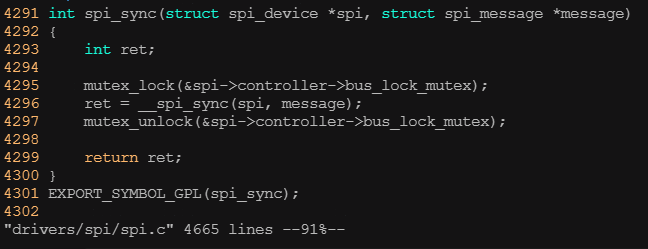
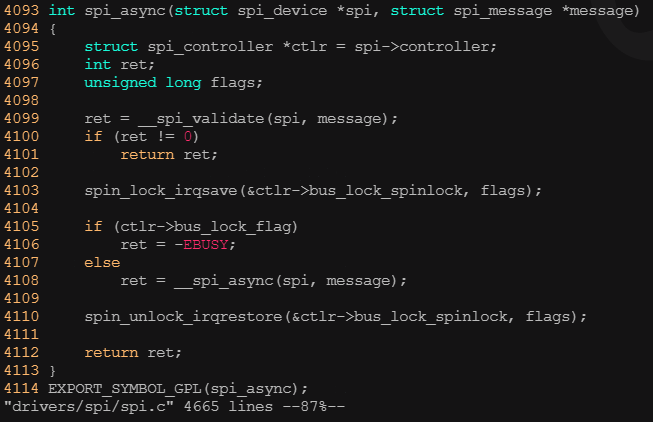
使用异步API时,不会阻塞等待这个消息被处理完,但是可以在spi_message的complete字段挂接一个回调函数,当消息被处理完成后,该函数会被调用。在异步操作时使用的API是:
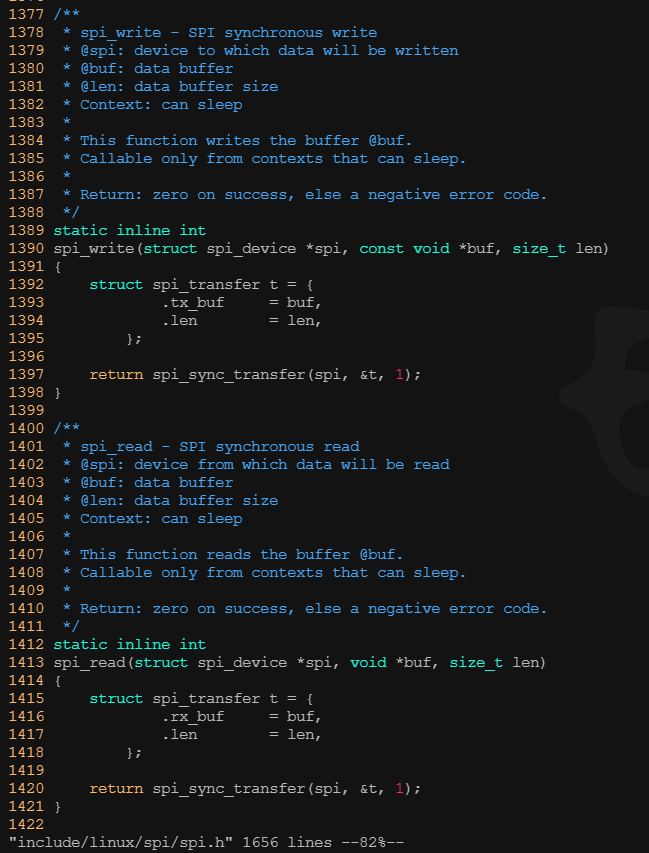
下图是非常典型的初始化spi_transfer、spi_message并进行spi数据传输的例子,同时spi_write()、spi_read()也是spi核心层的两个通用快捷API,在SPI外设驱动中可以直接调用它们进行简单的纯写和纯读操作。
SPI主机控制器驱动位于driver/spi/,这些驱动的主体是实现了spi_master的transfer()、transfer_one()、setup()这样的成员函数,当然,也可能是实现spi_bitbang的txrx_bufs()、setup_transfer()、chipselect()这样的成员函数。 下图SPI主机端驱动完成的波形传输
摘取了./drivers/spi/spi-pl022.c的部分代码。
1576 static int pl022_transfer_one_message(struct spi_controller *host,
1577 struct spi_message *msg)
1578 {
1579 struct pl022 *pl022 = spi_controller_get_devdata(host);
1580
1581 /* Initial message state */
1582 pl022->cur_msg = msg;
1583 msg->state = STATE_START;
1584
1585 pl022->cur_transfer = list_entry(msg->transfers.next,
1586 struct spi_transfer, transfer_list);
1587
1588 /* Setup the SPI using the per chip configuration */
1589 pl022->cur_chip = spi_get_ctldata(msg->spi);
1590 pl022->cur_cs = spi_get_chipselect(msg->spi, 0);
1591 /* This is always available but may be set to -ENOENT */
1592 pl022->cur_gpiod = spi_get_csgpiod(msg->spi, 0);
1593
1594 restore_state(pl022);
1595 flush(pl022);
1596
1597 if (pl022->cur_chip->xfer_type == POLLING_TRANSFER)
1598 do_polling_transfer(pl022);
1599 else
1600 do_interrupt_dma_transfer(pl022);
1601
1602 return 0;
1603 }1840 static int pl022_setup(struct spi_device *spi)
1841 {
1842 struct pl022_config_chip const *chip_info;
1843 struct pl022_config_chip chip_info_dt;
1844 struct chip_data *chip;
1845 struct ssp_clock_params clk_freq = { .cpsdvsr = 0, .scr = 0};
1846 int status = 0;
1847 struct pl022 *pl022 = spi_controller_get_devdata(spi->controller);
1848 unsigned int bits = spi->bits_per_word;
1849 u32 tmp;
1850 struct device_node *np = spi->dev.of_node;
..........
..........
2027 /* Stuff that is common for all versions */
2028 if (spi->mode & SPI_CPOL)
2029 tmp = SSP_CLK_POL_IDLE_HIGH;
2030 else
2031 tmp = SSP_CLK_POL_IDLE_LOW;
2032 SSP_WRITE_BITS(chip->cr0, tmp, SSP_CR0_MASK_SPO, 6);
2033
2034 if (spi->mode & SPI_CPHA)
2035 tmp = SSP_CLK_SECOND_EDGE;
2036 else
2037 tmp = SSP_CLK_FIRST_EDGE;
2038 SSP_WRITE_BITS(chip->cr0, tmp, SSP_CR0_MASK_SPH, 7);
2039
2040 SSP_WRITE_BITS(chip->cr0, clk_freq.scr, SSP_CR0_MASK_SCR, 8);
...........
...........
2057 err_config_params:
2058 spi_set_ctldata(spi, NULL);
2059 kfree(chip);
2060 return status;
2061 }2101 static int pl022_probe(struct amba_device *adev, const struct amba_id *id)
2102 {
2103 struct device *dev = &adev->dev;
2104 struct pl022_ssp_controller *platform_info =
2105 dev_get_platdata(&adev->dev);
2106 struct spi_controller *host;
2107 struct pl022 *pl022 = NULL; /*Data for this driver */
2108 int status = 0;
..........
..........
2133 /*
2134 * Bus Number Which has been Assigned to this SSP controller
2135 * on this board
2136 */
2137 host->bus_num = platform_info->bus_id;
2138 host->cleanup = pl022_cleanup;
2139 host->setup = pl022_setup;
2140 host->auto_runtime_pm = true;
2141 host->transfer_one_message = pl022_transfer_one_message;
2142 host->unprepare_transfer_hardware = pl022_unprepare_transfer_hardware;
2143 host->rt = platform_info->rt;
2144 host->dev.of_node = dev->of_node;
2145 host->use_gpio_descriptors = true;
2146
2147 /*
..........
..........
2239 err_spi_register:
2240 if (platform_info->enable_dma)
2241 pl022_dma_remove(pl022);
2242 err_no_irq:
2243 clk_disable_unprepare(pl022->clk);
2244 err_no_clk_en:
2245 err_no_clk:
2246 err_no_ioremap:
2247 amba_release_regions(adev);
2248 err_no_ioregion:
2249 spi_controller_put(host);
2250 return status;
2251 }SPI外设驱动遍布内核的drivers、sound的各个子目录之下,SPI只是一种总线,spi_driver的作用只是将SPI外设挂接在该总线上,因此在spi_driver的probe()函数中,将注册SPI外设本身所属设备驱动的类型。
和platform_driver对应一个platform_device一样,spi_driver也对应一个spi_device,platform_device需要在BSP的板文件中添加板信息数据,而spi_device也同样需要。spi_device的板信息用spi_board_info结构体描述,该结构体记录着spi外设使用的主机控制器序号、片选序号、数据比特率、SPI传输模式(即CPOL、CPHA)等。诺基亚770上的两个SPI设备的板信息数据如下图所示,位于板文件的arch/arm/mach-omap1/board-nokia770.c中。
151 static struct spi_board_info nokia770_spi_board_info[] __initdata = {
152 [0] = {
153 .modalias = "lcd_mipid",
154 .bus_num = 2,
155 .chip_select = 3,
156 .max_speed_hz = 12000000,
157 .platform_data = &nokia770_mipid_platform_data,
158 .swnode = &nokia770_mipid_swnode,
159 },
160 [1] = {
161 .modalias = "ads7846",
162 .bus_num = 2,
163 .chip_select = 0,
164 .max_speed_hz = 2500000,
165 .swnode = &nokia770_ads7846_swnode,
166 },
167 };在linux启动过程中,在机器的init_machine()函数中,会通过如下语句注册这些spi_board_info:
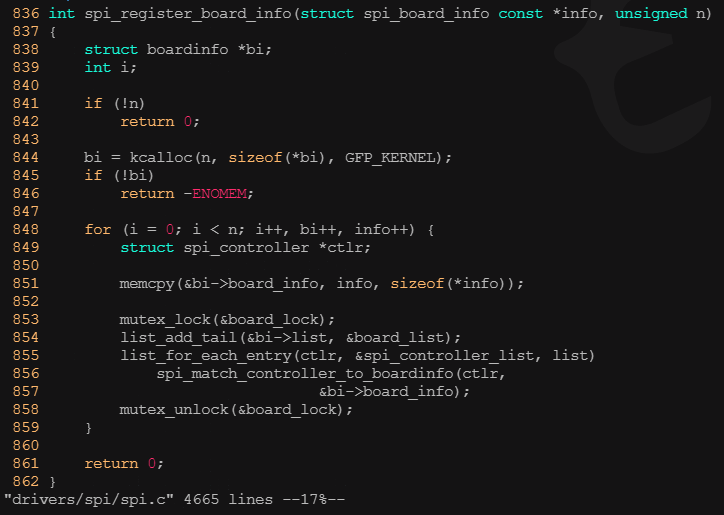
这一点和启动时通过platform_add_device()添加platform_device非常相似。
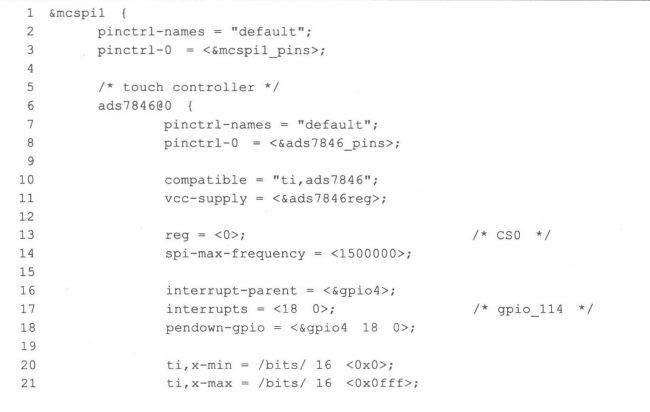
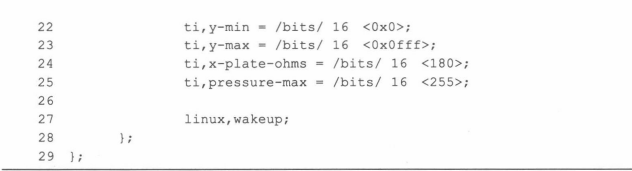
ARM Linux 3.x之后的内核在改为设备树,不再需要在arch/arm/mach-xxx中编码SPI的板级信息了。而倾向于在SPI控制器节点下填写子节点,如下图通过设备树添加SPI外设。



)



、浅拷贝,原理讲解与示例代码)

)
-- 基础语法与数据类型)








