【导读】
本文致力于解决一个非常实际的工业问题:如何利用无人机(UAV)全自动、高效、可靠地检查风力涡轮机叶片。叶片是风力发电机组中最昂贵且易损的部件之一,定期检查至关重要。然而,当前的技术在自动化过程中面临几个核心痛点,本文正是针对这些痛点提出了创新的解决方案。
目录
关键贡献概述如下:
一、实验
基于费马点的叶片停止角度估计
叶片细节优先曝光调整
二、结论与未来工作
在检查过程中,利用伺服控制或轨迹规划使无人机沿叶片飞行并采集图像。这些图像对后续阶段的损伤检测至关重要。在图像采集过程中,阳光和相机角度的变化可能会在叶片和背景区域之间引入显著的亮度差异。然而,主流现成相机中集成的自动曝光调整功能优先考虑整体图像曝光,而不是聚焦于特定感兴趣区域。这可能导致叶片区域过度曝光或曝光不足,可能掩盖关键细节并使后续损伤检测复杂化。
论文标题:
High-Precision Fish Pose Estimation Method Based on Improved HRNet
论文链接:
https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202502001?refererToken=58ec6ffbb457478083f1e41248064fcd
关键贡献概述如下:
-
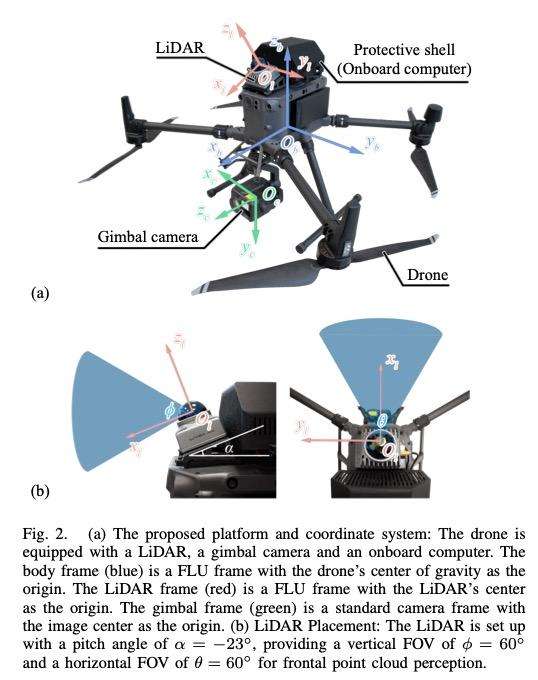
无人机检查平台:针对自动检查任务和场景的需求,我们介绍了一种具有长续航能力、高抗风能力、大规模感知能力、高质量图像采集能力和高计算能力的无人机检查平台。
-
-
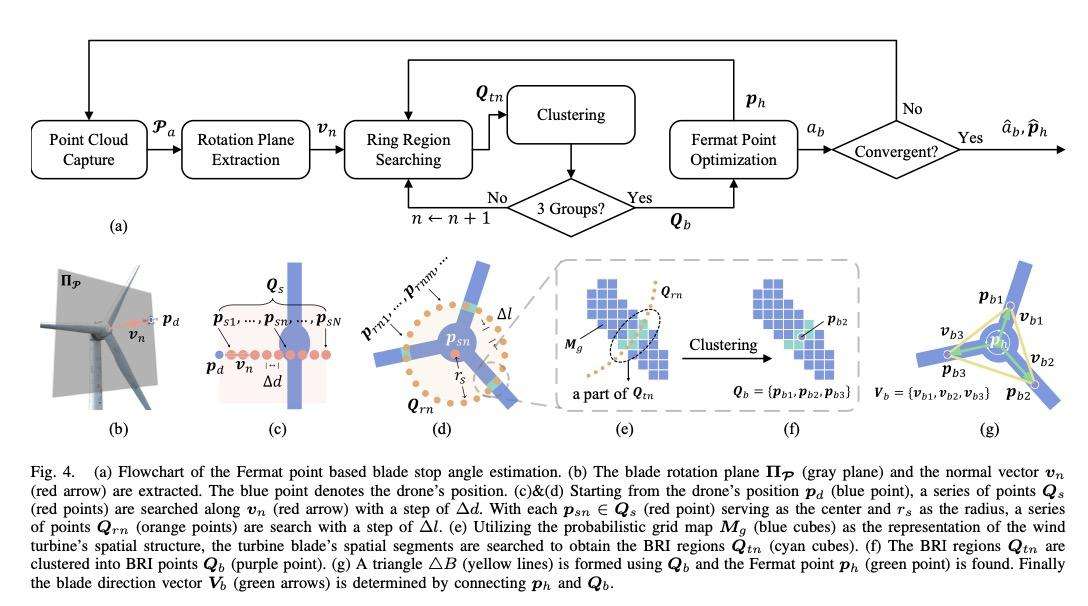
基于费马点的叶片停止角度估计方法:受风力涡轮机独特空间几何属性的启发,我们提出了一种基于费马点的叶片停止角度估计方法,该方法实现了更高的精度,且不受背景环境的影响。
-
-
实时叶片细节优先曝光调整方法:提出了一种曝光调整方法,在采集过程中优先考虑叶片细节并实时调整曝光,确保在不同阳光条件下保持适当的亮度和细节保留。
-
在运营风电场进行现场验证:在5个风电场中对10种风力涡轮机模型进行的超过120次飞行的广泛测试证明了所提出平台和方法的稳健可靠性,确认了它们在实际检查场景中的有效性。
一、实验
-
基于费马点的叶片停止角度估计
在每次测试中,风力涡轮机的制动系统被激活以停止涡轮转子,现场多变的风况自然产生了不同的叶片停止角度。我们将实验结果与已建立的基于视觉的方法进行了比较。Stokkeland 等人提出了一种基于视觉的方法,采用霍夫线变换来检测线条,并使用投票算法来识别叶片线。该方法在保留其关键投票算法的同时,被调整以适应我们的估计距离。实验结果如图 6 所示。图 6(i) 和 (ii) 分别显示了背景山脉和风力涡轮机塔架对基于视觉的方法的干扰,导致识别右侧和下部叶片不准确,从而影响了估计结果。在图 6(iii) 中,背景村庄复杂的视觉细节使得基于视觉的方法中的投票算法无法识别涡轮叶片,导致估计失败。
相比之下,所提出的方法利用激光雷达的精确点云,基于叶片旋转平面搜索涡轮叶片,不受背景视觉因素和涡轮塔架的影响。
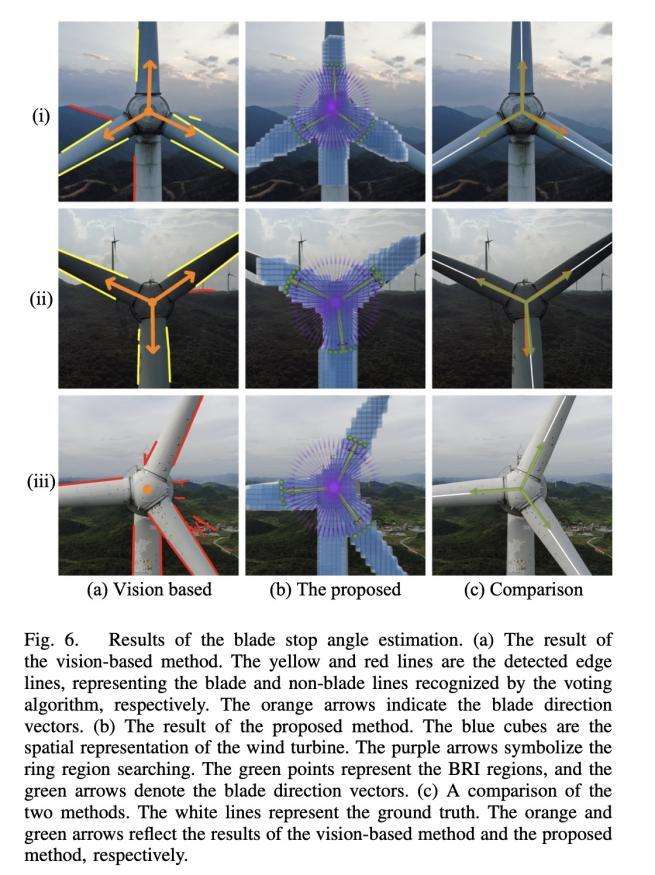
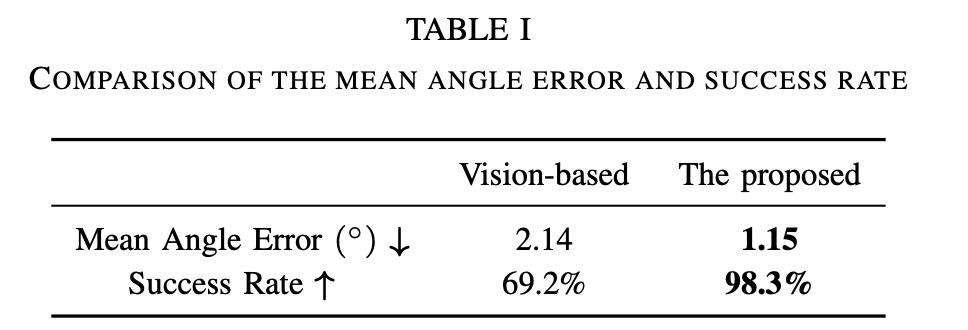
表 I 比较了两种方法的平均角度误差和成功率。所提出的方法优于基于视觉的方法,具有更低的平均角度误差(1.15° 对比 2.14°)和显著更高的成功率(98.3% 对比 69.2%)。这些发现强调了所提出方法卓越的鲁棒性和准确性。在这 120 次试验中,观察到 2 次失败实例。一次是由于大雾,影响了激光雷达对叶片结构的感知。另一次源于先验轮毂位置估计 p0h 存在较大误差,使得环形区域搜索无法提取 BRI 区域。未来的工作将侧重于提高先验轮毂位置估计的准确性。
-
叶片细节优先曝光调整
实验在晴天、多云和阴天进行,以引入不同的阳光条件,从而在曝光不足和曝光过度的场景下测试该方法。控制所提出的平台检查涡轮叶片,从叶片根部到叶尖以预定义的时间间隔捕获图像。具体来说,μ 反映亮度,σ 和 H 表示细节的复杂程度。通常,曝光不足普遍存在于叶片下表面,而曝光过度则常见于上表面。对这两种场景的评估详见图 7。
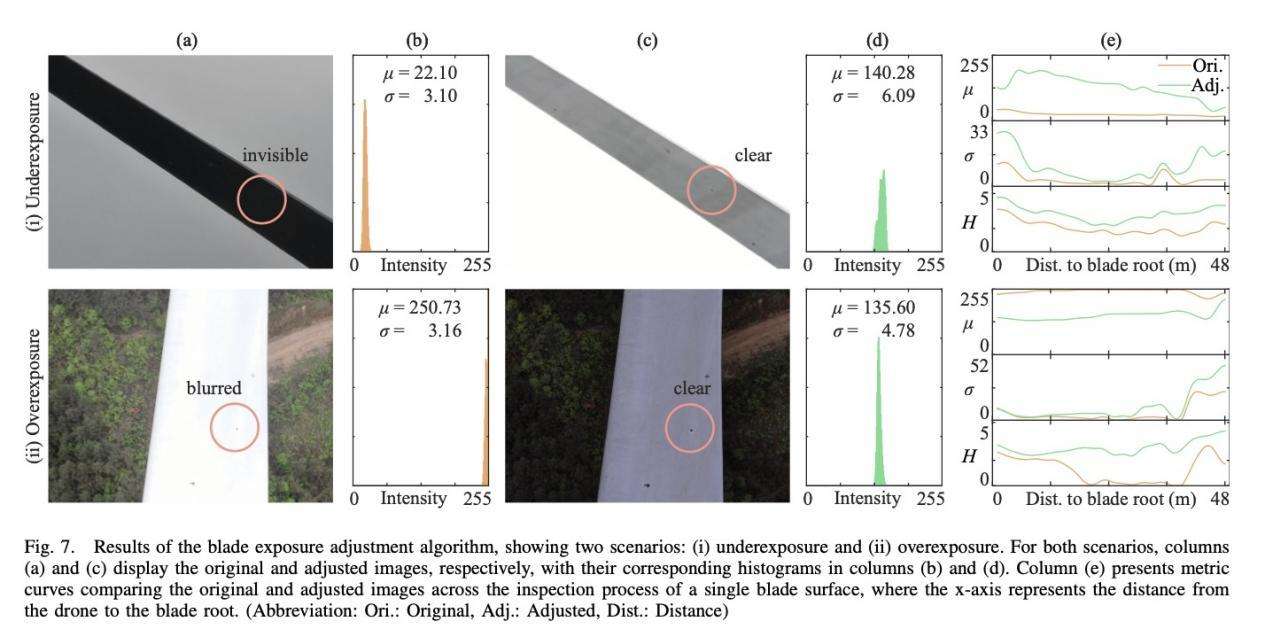
通过比较原始图像和调整后的图像,我们分析了它们在叶片区域内的直方图。直方图的位置和宽度分别反映了亮度和细节丰富度。如图 7(i)-(a) 所示,曝光不足表现为昏暗和细节不可见(图 7(i)-(a) 中的红色圆圈)。调整后的图像图 7(i)-(c) 提高了亮度,显示出更清晰的细节。在图 7(i)-(b) 和 (i)-(d) 中,相应的直方图显示灰度值从22.10的低值过渡到140.28,灰度范围扩大了97.0%。相反,图 7(ii)-(a) 描绘的曝光过度导致亮度过高和细节模糊(图 7(ii)-(a) 中的红色圆圈)。调整后的图像图 7(ii)-(c) 纠正了这一点,增强了细节的复杂性。在图 7(ii)-(b) 和 (ii)-(d) 中,它们相应的直方图从250.73的高灰度值转变为 135.60,灰度范围扩大了51.3%。
我们计算了原始图像和调整后图像的这些指标,并绘制了无人机从叶片根部检查到叶尖过程中的曲线。图 7(i)-(e) 和 (ii)-(e) 分别说明了曝光不足和曝光过度的场景。原始的μ曲线处于极端值,而调整后的曲线稳定在一个最佳范围内,表明亮度得到了适当的调整。调整后的 σ 和 H 曲线超过了原始曲线,意味着更丰富的叶片细节。表 II 展示了指标平均值。
-
在曝光不足场景中,亮度从 25.48 增加到 133.27,以 σ 和 H 量化的细节丰富度分别提高了218.85% 和56.19%。
-
在曝光过度场景中,亮度从245.64调整到150.85,细节丰富度分别提高了 187.73% 和 40.65%。
这些结果证实了所提出方法在两种场景下的有效性,能够保持适当的亮度并保留复杂的叶片细节。
获取的高质量图像数据可无缝接入Coovally平台进行自动化处理。平台提供从数据管理、标注到模型训练的全流程支持,内置YOLO系列、Transformer等多种主流模型,支持分布式训练加速和自动化超参调优,显著提升损伤检测模型的开发效率。
!!点击下方链接,立即体验Coovally!!
平台链接:https://www.coovally.com
在阳光快速变化期间偶尔会出现次优性能。曝光调整的轻微延迟导致在少数连续帧中出现暂时的过度曝光或曝光不足,表明在快速变化光照下的响应速度还有提升空间。
二、结论与未来工作
本文针对基于无人机的风力涡轮机叶片自动检查,提出了一种无人机检查平台、一种基于费马点的叶片停止角度估计方法和一种叶片细节优先的曝光调整方法。
在 5 个运营风电场中对 10 种风力涡轮机模型进行的广泛 120 次飞行证明了其卓越的性能,为解决自动检查的核心挑战做出了切实贡献。
-
平台的稳定性确保了在复杂风电场环境中一致的数据收集,解决了操作可靠性挑战。
-
叶片停止角度估计方法具有 1.15° 的平均误差和 98.3% 的成功率,提高了叶片位置准确性,有助于更精确的检查轨迹规划,并减少了沿叶片表面的飞行跟踪误差。这对于确保叶片检查的全面覆盖至关重要。
-
此外,曝光调整方法保持了最佳的叶片亮度并增强了细节清晰度,在曝光不足和曝光过度场景下分别提高了 56.19% 和 40.65%。这使得细微缺陷可区分,直接提高了下游损伤检测的可靠性。
在未来的工作中,基于本文提出的平台和方法,我们将旨在进行更全面的风力涡轮机参数估计以及检查飞行的规划与控制,最终实现一个完全自动化的、基于无人机的风力涡轮机叶片检查系统。通过集成Coovally这样的高效AI开发平台,将能够进一步简化数据处理、模型训练与部署流程,大幅降低技术门槛,加速智能巡检解决方案的实际落地与应用。
为了帮助用户更高效地掌握模型训练全过程,Coovally平台还可以直接查看“实验日志”。在每一个实验详情页中,用户都可以实时查看训练日志、输出信息或报错内容,无需额外配置、无缝集成于工作流中!
不论是模型调参、错误排查,还是过程复现,这项新功能都将大幅提升你的实验效率。

与关键技术深度解析研究报告,以及实现代码)







NO.2——Unity6下载与安装(超详细))

)







