目 录
1 绪论 1
1.1 选题的背景及意义 1
1.2 水下管道巡检机器人的分类 2
1.2.1 管道巡检技术的分类 2
1.2.2管道巡检机器人的分类 2
1.3 研究的现状 3
1.3.1 国内的研究现状 3
1.3.2 国外的研究现状 4
1.4 水下管道巡检机器人的发展趋势 5
1.5 本次设计主要研究内容 5
2 水下管道巡检机器人的总体方案设计 7
2.1 水下管道巡检机器人的性能指标 7
2.2 采用的研究方法 7
2.2 系统的总体方案设计 7
2.3 总体方案的创新点 9
3 水下管道巡检机器人的阻力分析和元器件选型 10
3.1 浮力分析 10
3.2 阻力分析 10
3.3 水下电机的选型计算 11
3.3.1 水下推进器的选型计算 11
3.4 水下机械手的选型计算 12
3.4.1 结构方案设计 12
3.4.2 夹持装置设计 13
3.4.3 夹持电机的选型 14
4 水下巡检机器人控制系统的设计 15
4.1 主控单片机的选型 15
4.2 视觉检测传感器的选型 15
4.3 电机驱动的选型设计 16
5 水下巡检机器人的三维建模与有限元分析 18
5.1 soldworks 18
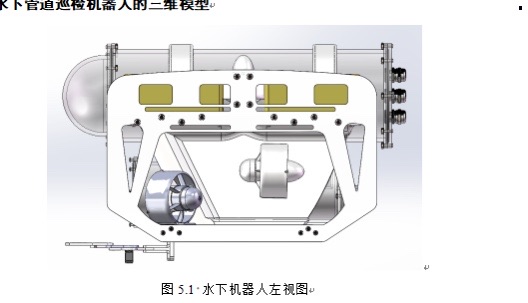
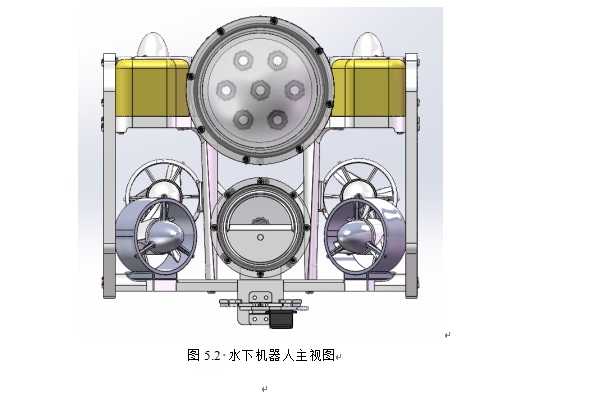
5.2 水下管道巡检机器人的三维模型 19
5.3 水下管道巡检机器人的有限元分析 20
5.3.1 ansys workbench 20
5.3.2 有限元分析的目的 21
5.3.3 材料的选择 22
5.3.4 网格划分 22
5.3.5 施加载荷 23
5.3.6 后处理 23
5.4 水下巡检机器人的工艺性分析 24
5.5 水下巡检机器人经济成本分析 24
6 总结和展望 26
6.1 总结 26
6.2 展望 26
致 谢 27
文 献 参 考 28
1 绪论
1.1 选题的背景及意义
随着科技的发展,管道运输凭借其成本低、传送量大等优点,在水下油气运输领域得到了广泛的应用[1]。众所周知,海洋蕴藏着巨大的资源,例如石油、天然气等。随着人口的加剧,我国工业化脚步的推进,我国基础工业的建设对于能源的需求越来越大,于此同时,随着科技的发展,各种水下机器人应运而生,这对于水下世界的探索具有重要的引领作用。通过各种水下机器人对于水下世界的探索,越来越多的水下油气资源被发现,我国迫切需要完成对于水下油气资源的开采和利用[2][3]。上世纪80年代以来,随着海底石油、天然气的开采,水下管道作为一种重要的物料运输设施,得到了广泛的应用,水下管道运输相比于传统的陆地运输方式,具有更大的优势,便捷经济的优势得到越来越多的青睐。水下管道运输是除海陆空运输以外最重要的运输方式,主要为燃油能源运输提供便利。目前世界上石油天然气的总管道长度大概是200万千米,我国中长距离管道运输的总长度在2万千米左右,世界上约有50%的管道需要长时间的使用,而这些管道大部分都位于地下、海底、水下等比较复杂的介质中,这就使得人们对于管道的日常巡检困难加剧,工作人员不能及时发现管道的故障问题,从而造成各种事故,危害人们的健康。到现在为止,我国的油气储运管道一共发生了628次危险事故,260余人受伤,损失约2.5亿美元[4][5],海洋管道一旦发生泄漏或者破坏,就会对周围的人和环境产生严重危险。因此研究水下管道破损自动巡检技术,提高检测的可靠性和自动化,改善人员作业环境,降低劳动强度,提高自动化水平,对提高管道运输的安全性具有重要的社会意义[6][7]。
随着我国城市基础工业的发展,对管道的需求也越来越多,而这些管道大部分都位于地下或者水下,管道的日常维护和保养就显得格外困难。同时随着我国海洋战略的推进,我国对于海底石油资源的开采,就需要大量的水下管道来进行油气的储运。与此同时,为避免水下管道在运输的时候出现各种危害人们健康的时间发生,就需要加强水下管道的巡检工作,因此就需要设计研发一些可以用于水下管道巡检的外壁检测机器人。水下管道巡检机器人可以提高巡检的作业效率、降低成本,因此通过本次设计可以为未来水下管道巡检机器人的研发创新打下坚实的基础,对我国海洋资源的开发和海洋工程的作业有着重大的意义。
1.2 水下管道巡检机器人的分类
1.2.1 管道巡检技术的分类
管道检测机器人根据检测目标的不同,可以分为两种,一种是用于检测管道外壁的机器人,这种巡检机器人的体积一般来说比较大,同时还具有清除管道外壁吸附物的功能。另外一种是专门用来检测管道内壁的机器人,这种机器人的体积一般比较小,主要可以用来检测管道内壁的裂缝等。管道巡检机器人常用的检测算法分别是视觉检测算法,视觉跟踪算法等。本文主要研究的是水下管道外巡检机器人的结构设计[8][9]。
1.2.2管道巡检机器人的分类
水下管道巡检机器人根据其与地面的联系方式的不同,分为遥控水下管道巡检机器人,简称ROV,自治水下管道机器人简称AUV,和混合型RHOV水下机器人如下图1.1所示[10]。
图1.1 水下管道外巡检机器人分类
ROV水下巡检机器人是一种远程的遥控巡检机器人,在机器人身上安装有多种视觉检测传感器和无线通信传感器,可以实现远程遥控的功能。通过工作母船放在海洋管道上,用来传送数据和操作指令,完成水下管道的无损检测。
AUV是自主运行的,不需要人为去干预,因为其行为不受母船控制,所有其巡检范围大,完成依靠自己去检测,工作效率高。
RHOV主要适用于海洋大范围管道的巡检,利用机器视觉和无线通信技术,完成管道的无损巡检和信息采集,RHOV将ROV和AUV技术进行结合,可以自主运行也可以遥控运行,适用范围比较广。
1.3 研究的现状
目前水下管道外巡检机器人的研究主要是集中在欧美国家,其研制的机器人自动化程度更高,更先进。Oceanneering公司设计研发的Magna海底隧道检测机器人和Tracerco公司设计研发的Discovery海底隧道检测机器人代表着目前水小管道外检测技术最先进的水平[11][12]。
1.3.1 国内的研究现状
我国对于水下管道巡检机器人的研究工作时间并不是特别长,相比于国外来说,起步时间比较晚,我国对于水下管道巡检机器人的研究工作其中有一部分处于实验室模拟状态,目前还没有应用于实际的工作场景。但是一些高校和研究所在水下管道巡检机器人取得了显著的成就。
其中哈尔滨工业大学设计研制的实时监测管道机器人可以轻松实现管道外壁的巡检工作,其主要是由六部分组成,分别是移动载体、视觉定位、无线装置、X射线机、检测系统和防护系统等[13]。我国的西安交通大学也设计研发了一些水下管道巡检机器人,用于管道内壁的巡检工作,采用的是一种蠕动式的前进方式,采用电磁铁可以吸附的特性行走于管道外壁。
上海交通大学设计研发的小

![[从零开始面试算法] (11/100) LeetCode 226. 反转二叉树:递归的“镜像”魔法](http://pic.xiahunao.cn/[从零开始面试算法] (11/100) LeetCode 226. 反转二叉树:递归的“镜像”魔法)







![[UT]记录case中seq.start(sequencer)的位置变化带来的执行行为的变化](http://pic.xiahunao.cn/[UT]记录case中seq.start(sequencer)的位置变化带来的执行行为的变化)
)

)







