这里对当前Lidar中的一些常见问题进行专项论述。首先以禾赛Lidar为例,列出相关参数,以备论述。


1、Lidar的线束是什么,由什么决定?
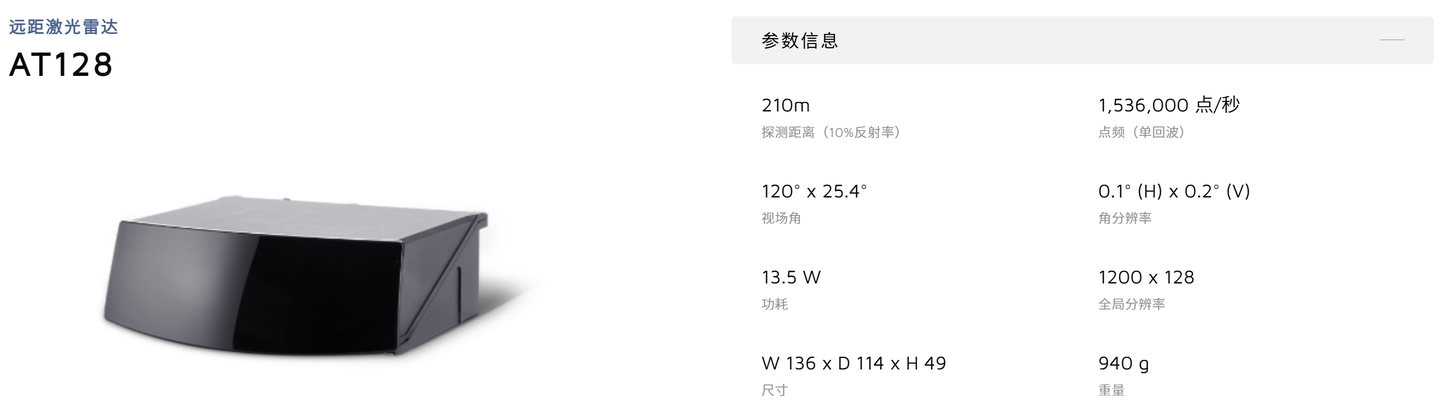
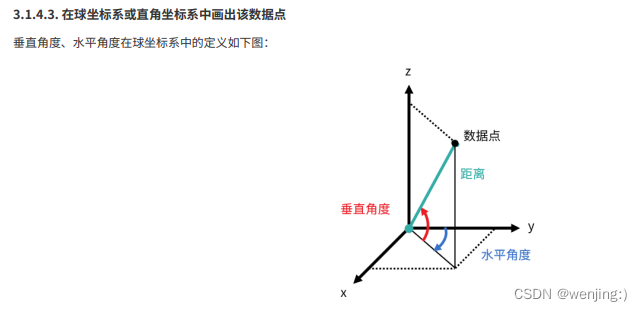
以AT128为例,该型号中的128即指128线,将垂直视场角(VFOV)进行128线划分,对应于垂直向分辨率:
-
从图1中的禾赛AT128参数可以看到,其VFOV为25.4°,垂直分辨率为0.2°,25.4/0.2=127,等同于对应128线;
-
从图1中的禾赛AT360参数可以看到,其VFOV为18°,垂直分辨率为0.05°,18/0.05=360,等同于对应360线;
-
从图1中的禾赛AT1440参数可以看到,其VFOV为18°,垂直分辨率为0.0125°,25.4/0.2=1440,等同于对应1440线;
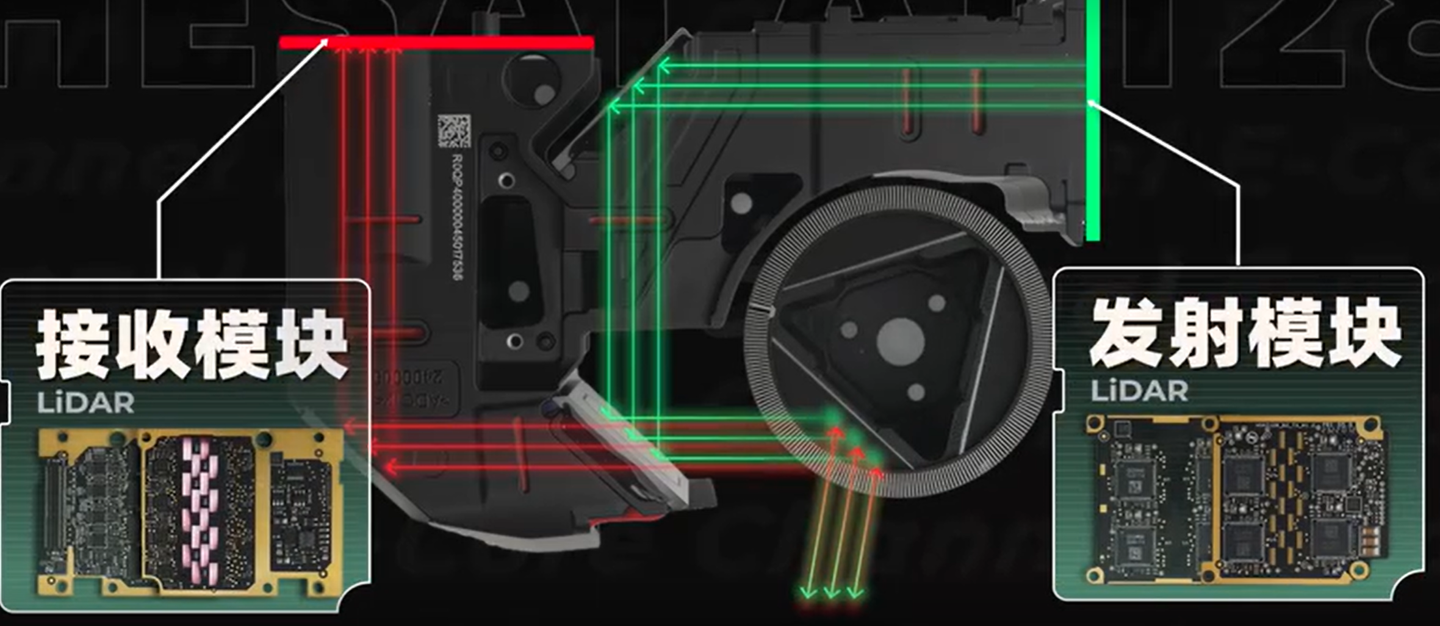
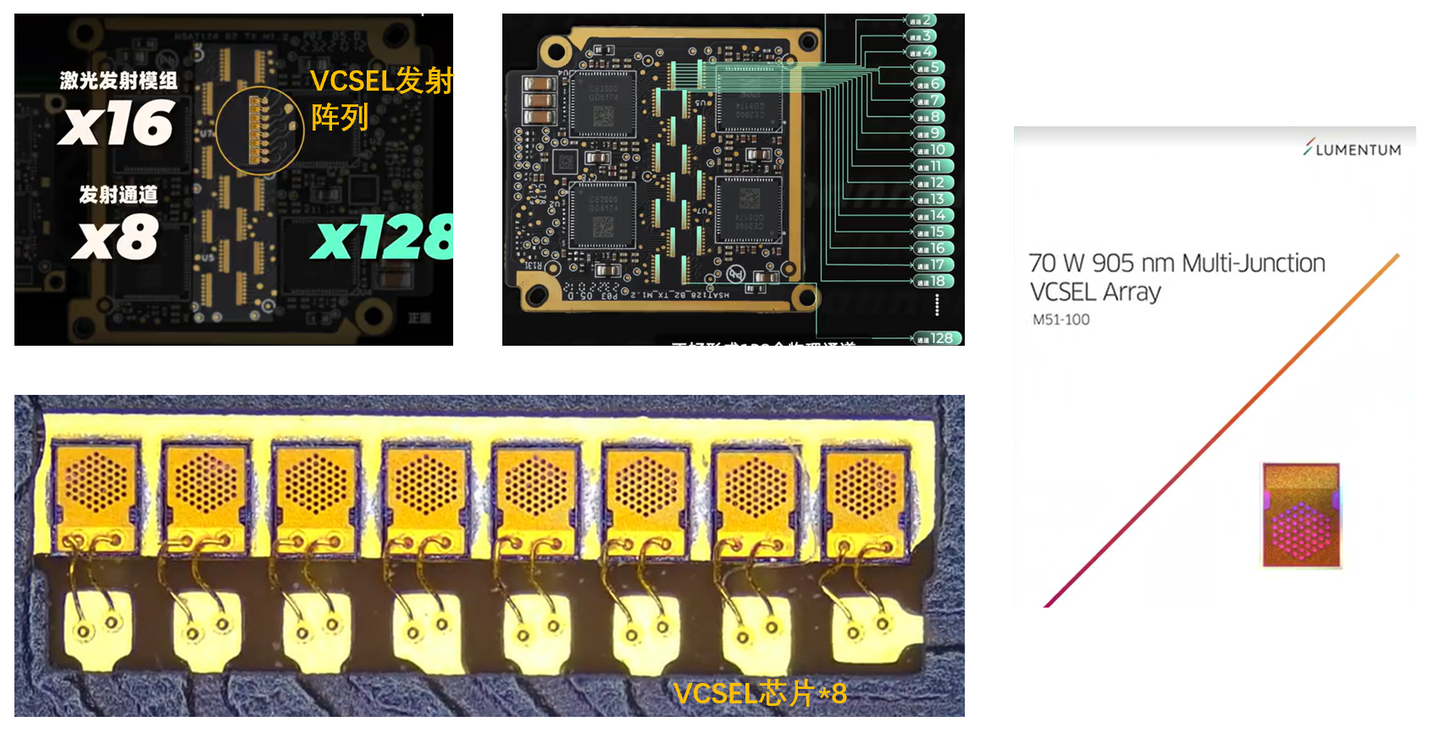
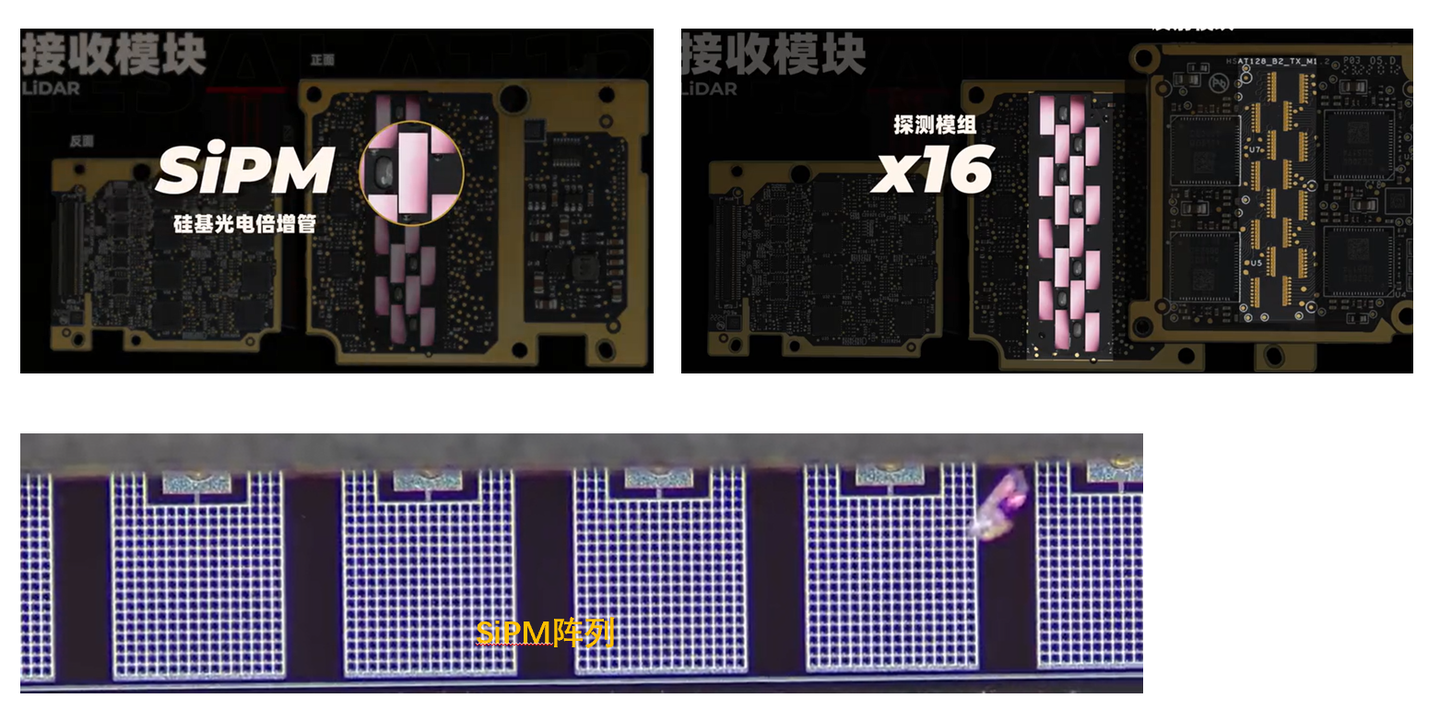
AT128内部设计如下:128个发射通道对应128个接受通道,从而形成了VFOV上的128线分辨率。
速腾M1采样的是另外一种方式,所以速腾M1是等效128线。通过振镜垂直向的可控摆动,实现了等效的128个垂直向的分割扫描,从而实现了等效128线。
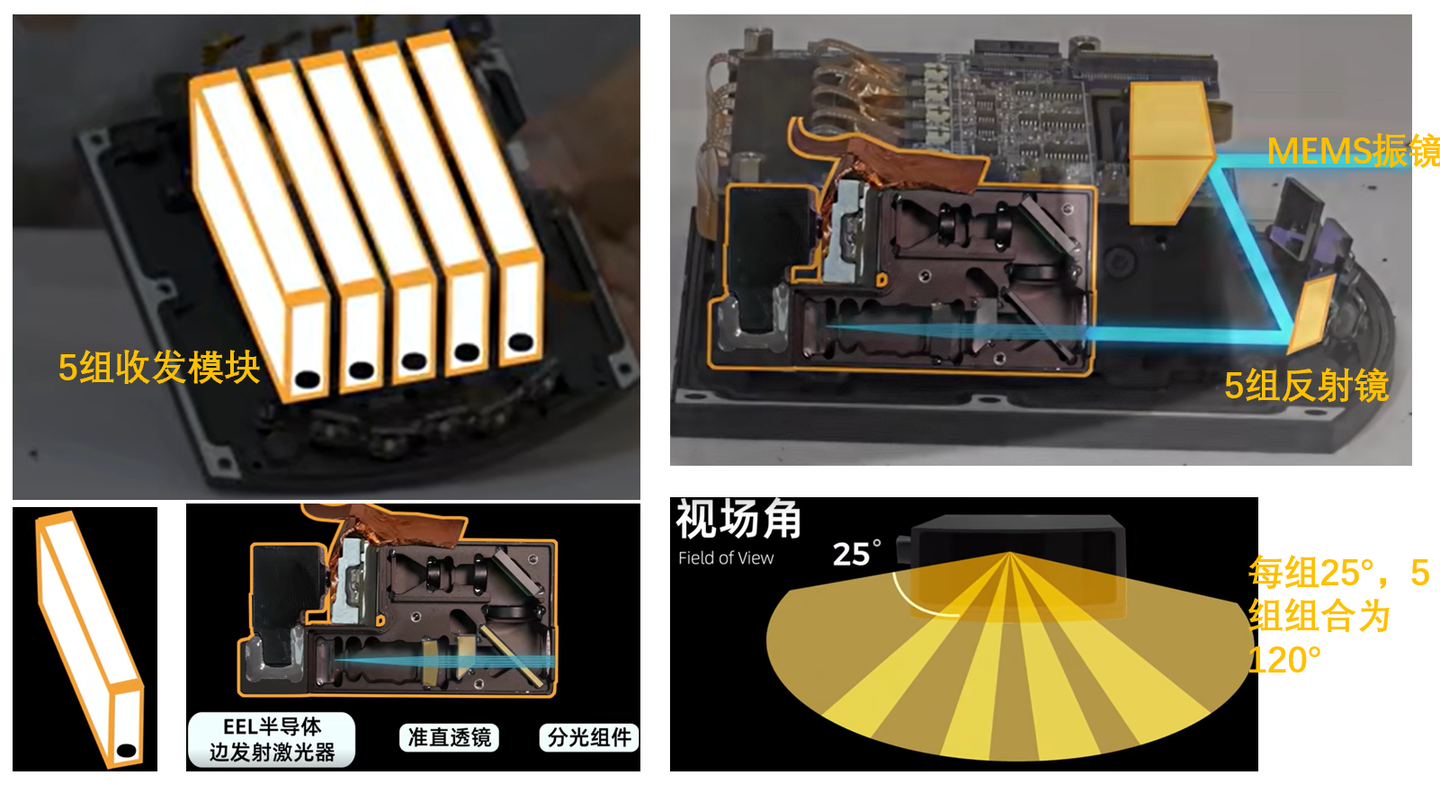

如上图所示,水平测角通过振镜水平向的摆动,由于振镜水平向摆动角度有限,所以用5组反射镜,进行拼接,实现水平120°的覆盖,垂直测角通过振镜垂直向的摆动完成,实现垂直向25°的覆盖。
M1的水平和垂直角分辨率均为0.2°,点频为每秒78.7万。垂直方案差不多等同于128线的AT128。
2、Lidar的量程是什么,由什么决定, 最大量程以及10%反射率量程是什么?
激光扫描中的“10%反射率”是指激光扫描测距产品在特定条件下能够测量的最大距离的一个参数。
定义:反射率是指物体表面反射光线的能力,而“10%反射率”则是指物体表面反射的激光能量占入射激光能量的10%。 这是一个标准化的测试条件,用于衡量激光扫描测距产品的性能。
应用场景:在激光扫描测距中,当被测物体的反射率为10%时,该激光扫描测距产品能够测量的最大距离为30米。 这意味着,如果被测物体的反射率高于10%,那么该产品可能能够测量更远的距离;反之,如果反射率低于10%,则测量距离可能会缩短。
重要性:了解激光扫描测距产品的反射率参数对于正确使用和评估产品性能至关重要。

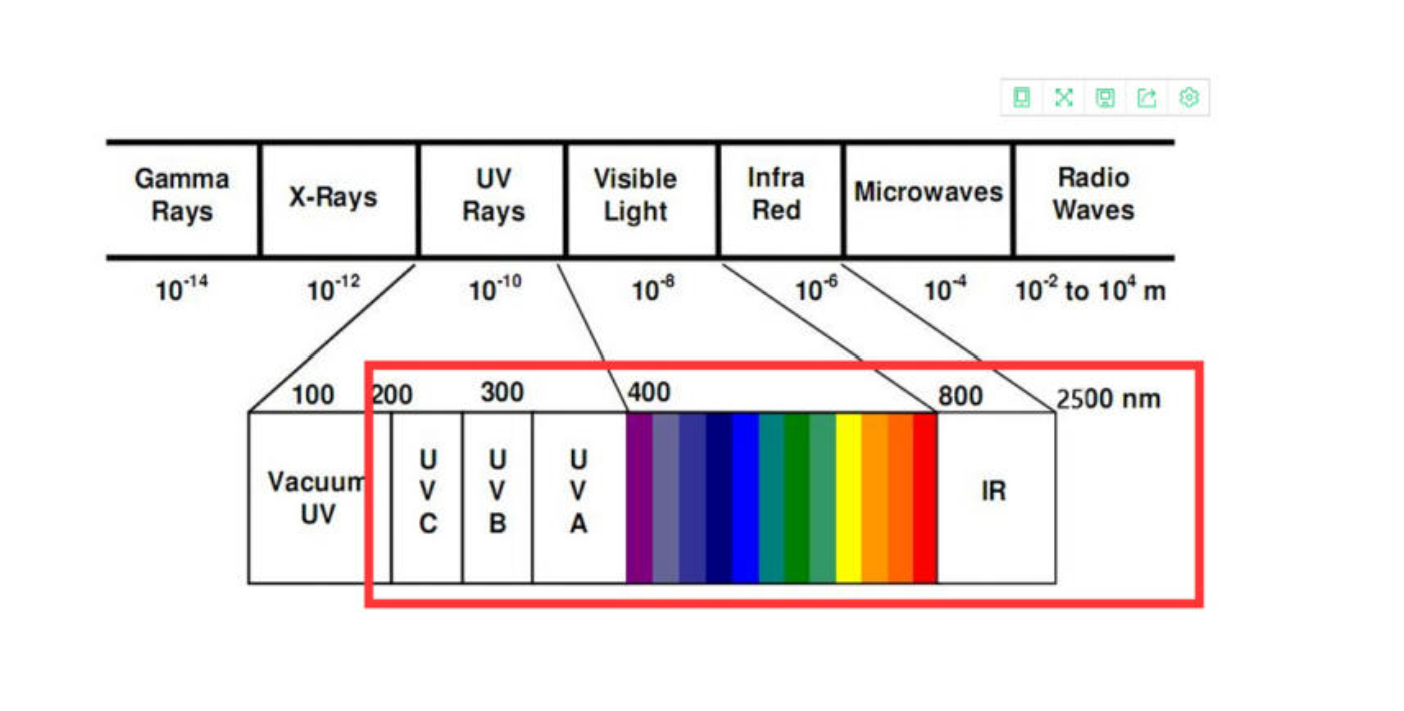
Lidar校准专用漫反射板技术要求:
-
使用宽200-2500nm的波长,可以在850nm、905nm、940nm、1550nm的普通激光器中应用。
-
反射率为2-99%可选,光谱图平坦。
-
具有接近完美的朗伯特性。
-
具有良好的漫射性测试效果。
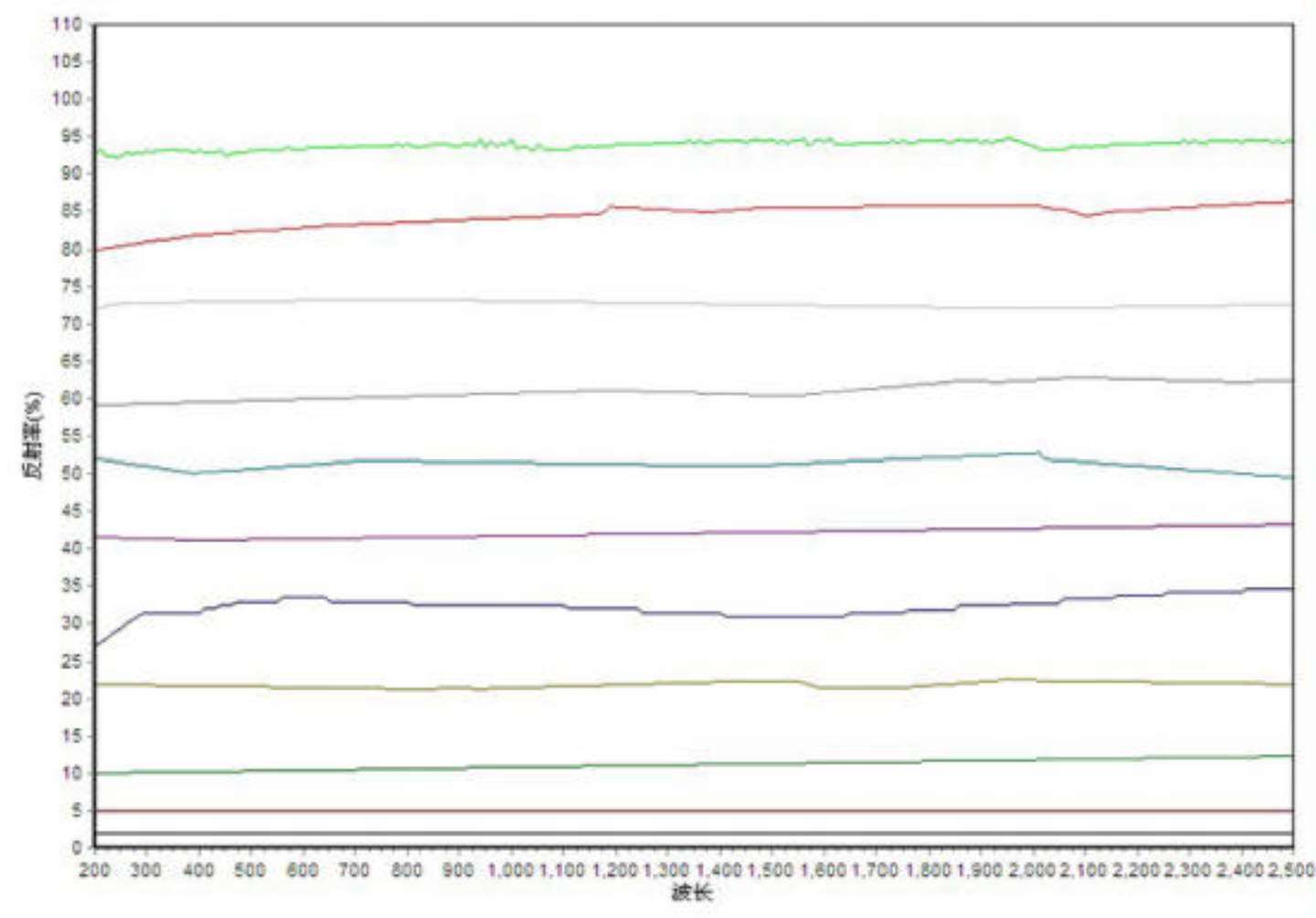
光谱反射率的补充:
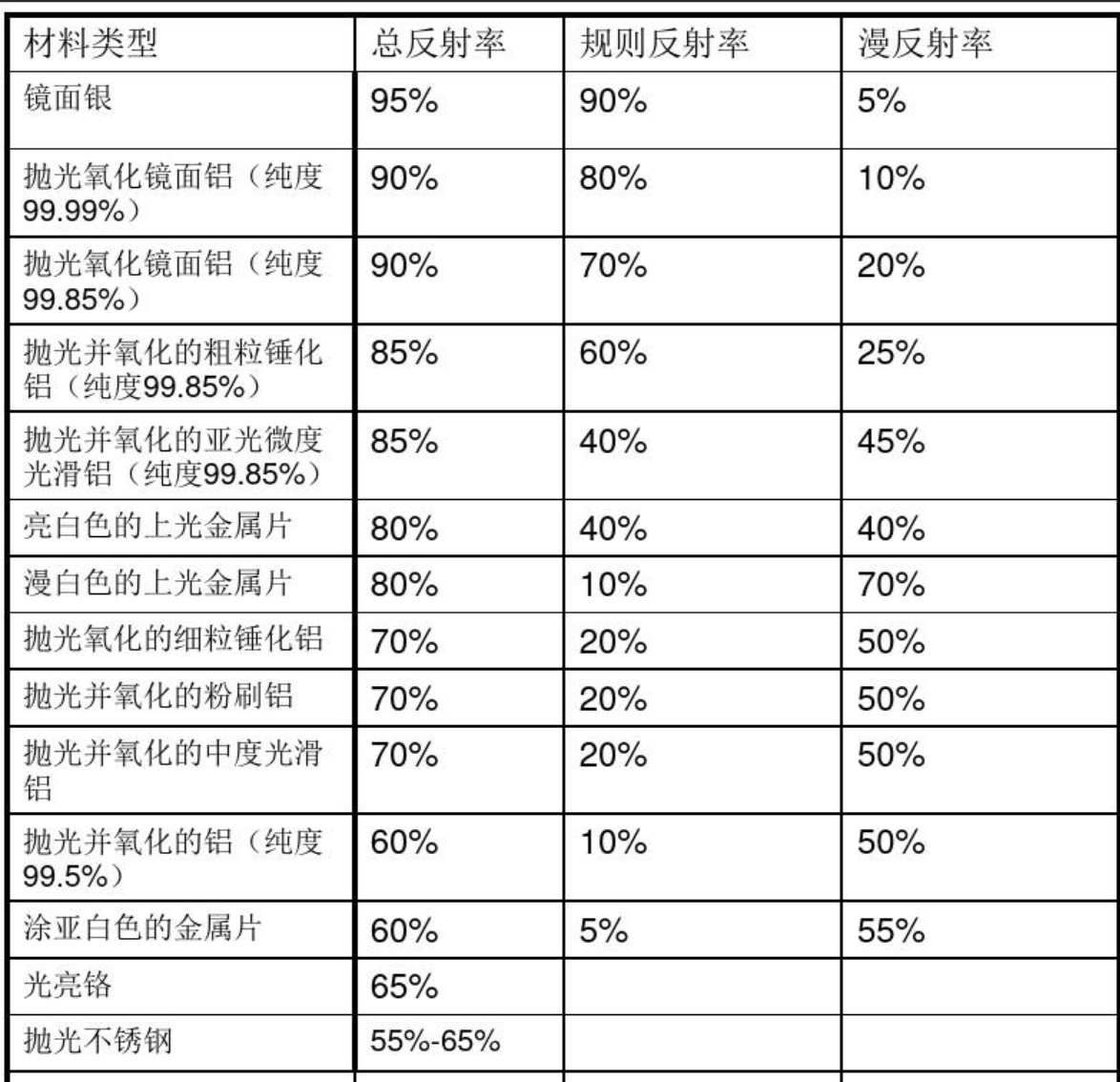
反射率汇总表可以参考下文
Ref:https://www.jstage.jst.go.jp/article/jieij1917/27/10/27_10_449/_pdf/-char/ja
以AT128为例,探测距离210m@10%反射率,即探测10%反射率的标准目标板可以达到210m,
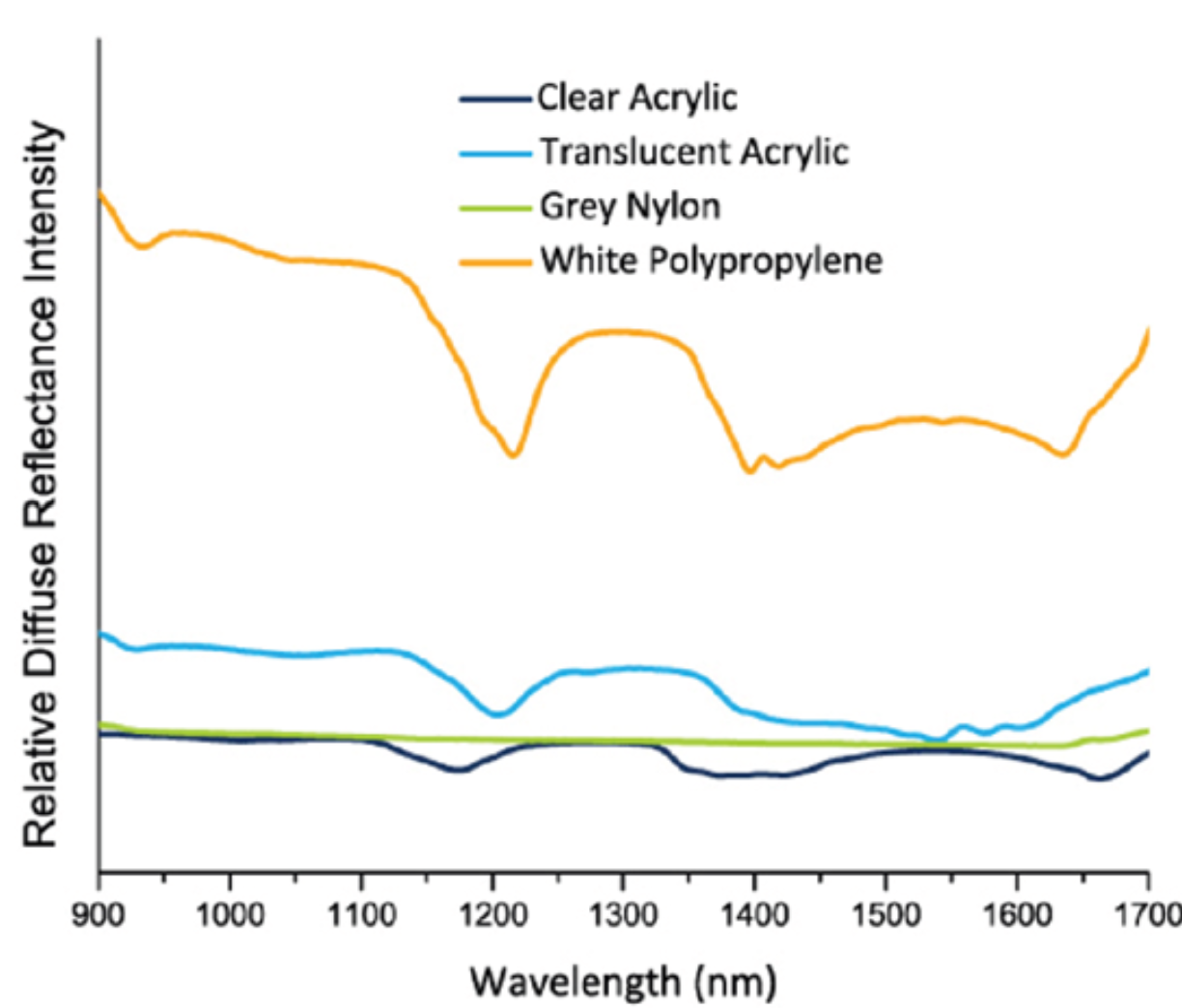
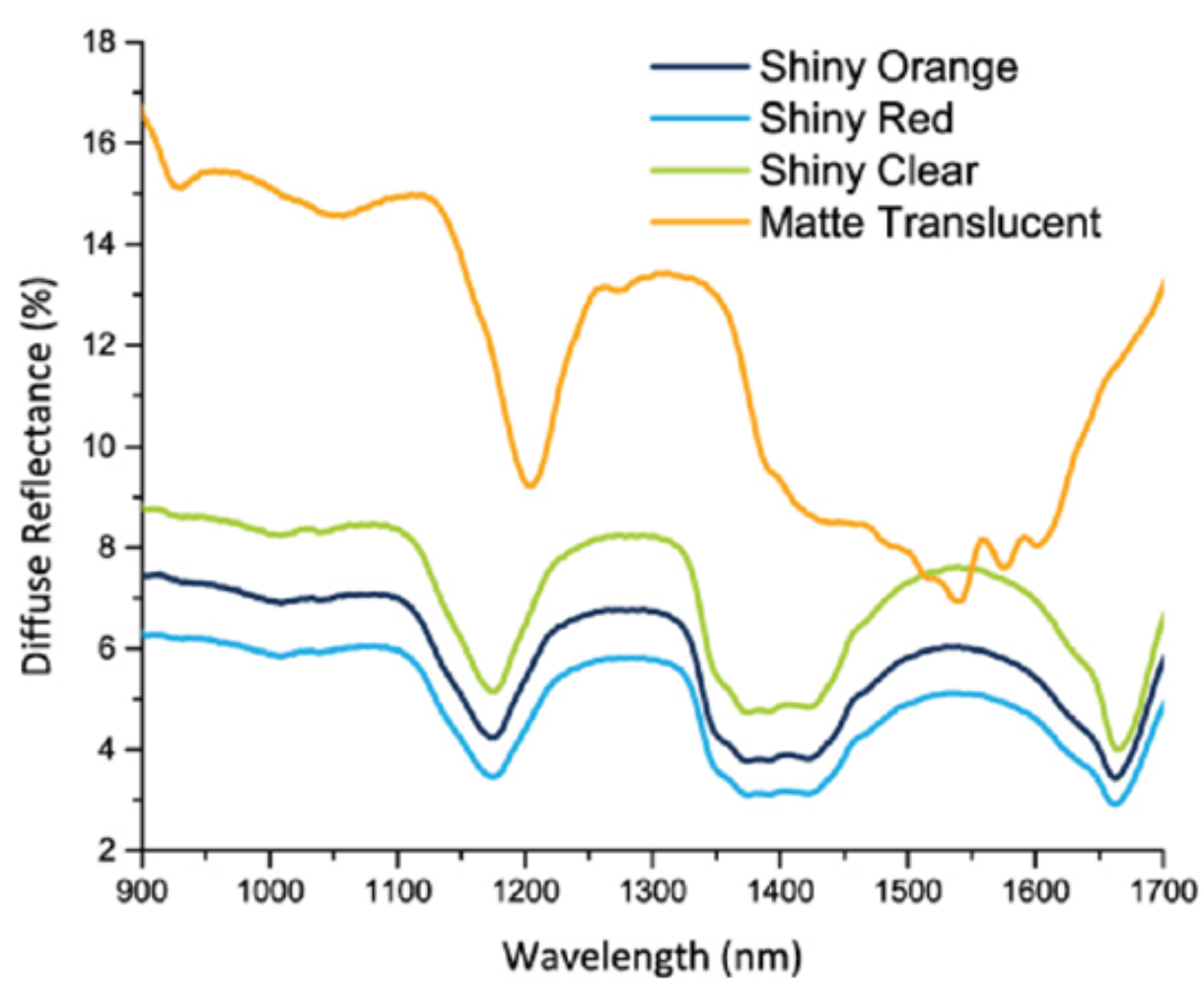
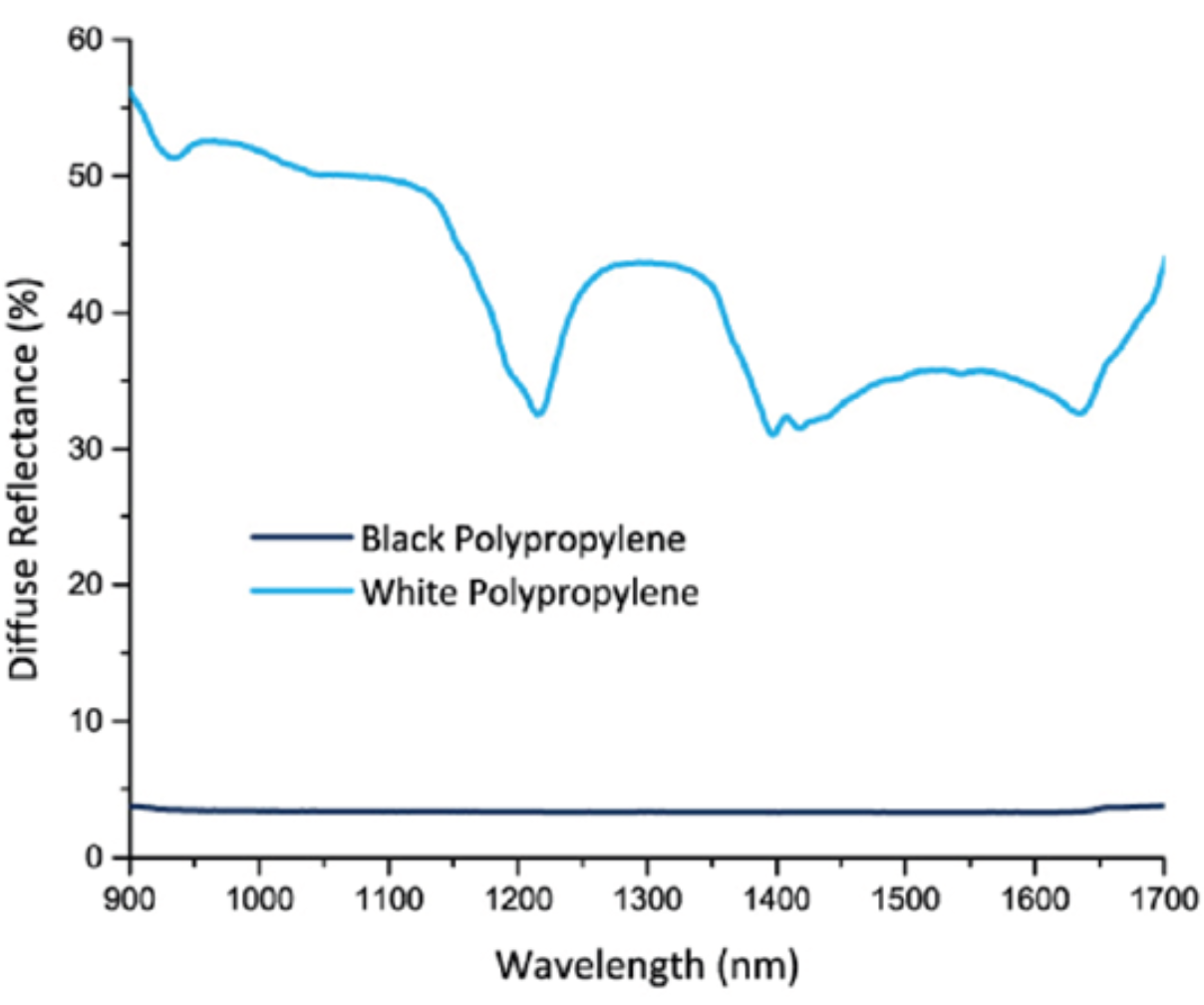
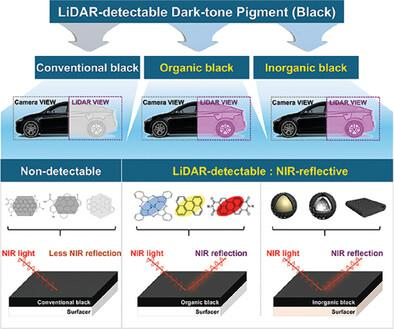
在自动驾驶中还存在以下研究:为自动驾驶设计具有高近红外反射率的 LiDAR 可检测暗色调材料
自动驾驶依赖于使用LiDAR技术对物体的精确识别,该技术在 905 nm 的特定波长下运行。黑色物体,例如用于车辆涂层的炭黑,往往会显着吸收这种特定波长,这限制了 LiDAR 传感器的性能。为了解决这个问题,研究人员探索了创造可以被 LiDAR 检测到的暗色调材料,具有高 NIR 反射率,同时保持真正的黑色(基于 CIE 颜色坐标的L* < 20)。这些材料分为两类:有机颜料和无机颜料。有机颜料可以通过操纵其官能团进行合成调整以实现真正的黑色,但实现高 NIR 反射率仍然具有挑战性,通常需要具有 NIR 反射白色基底的双层结构和上层有机黑色颜料。此外,对疏水添加剂的需求和对阳光降解的抵抗性进一步限制了它们的使用。对于无机颜料,可以通过仔细控制其成分、结构和形态来获得所需的 LiDAR 可检测特性,从而允许具有适当设计的单层涂层。
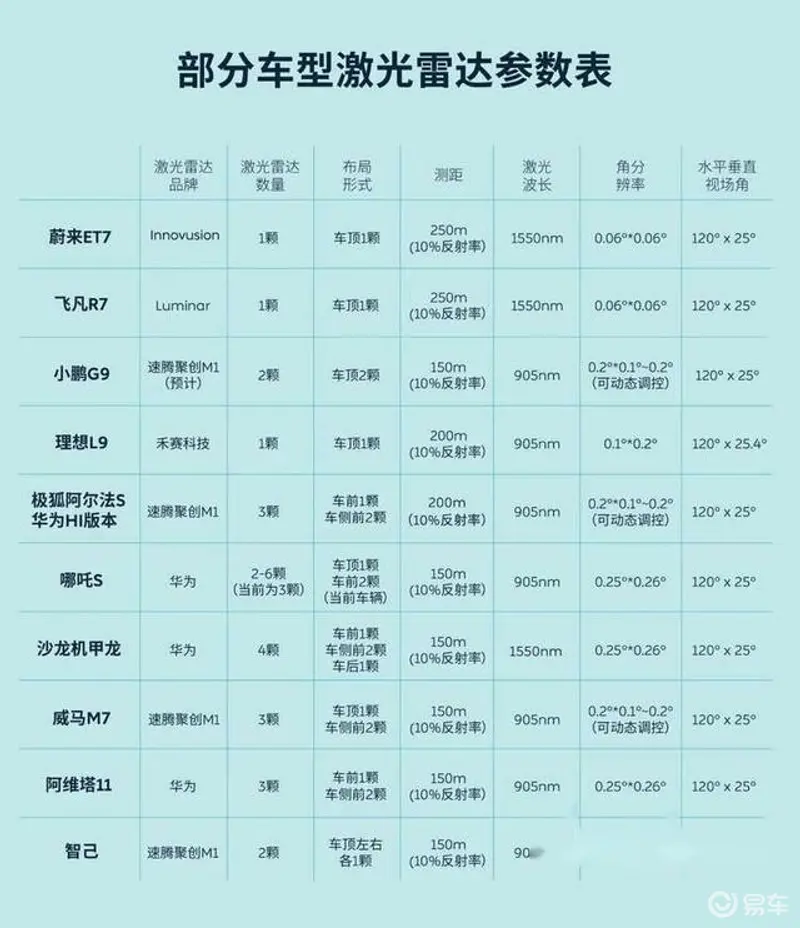
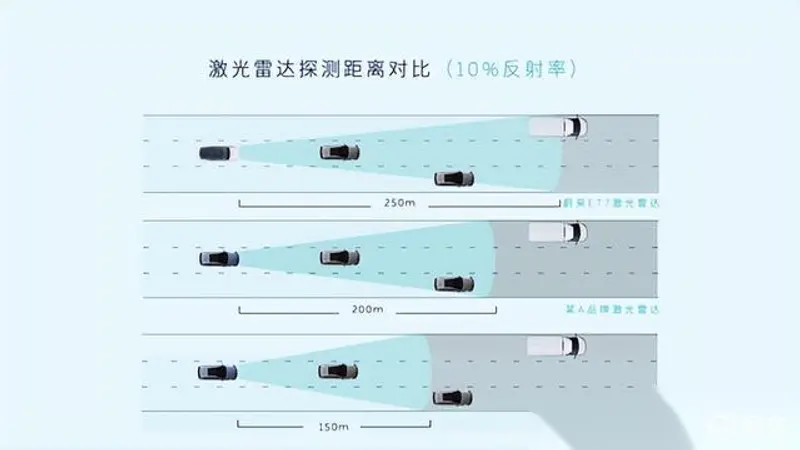
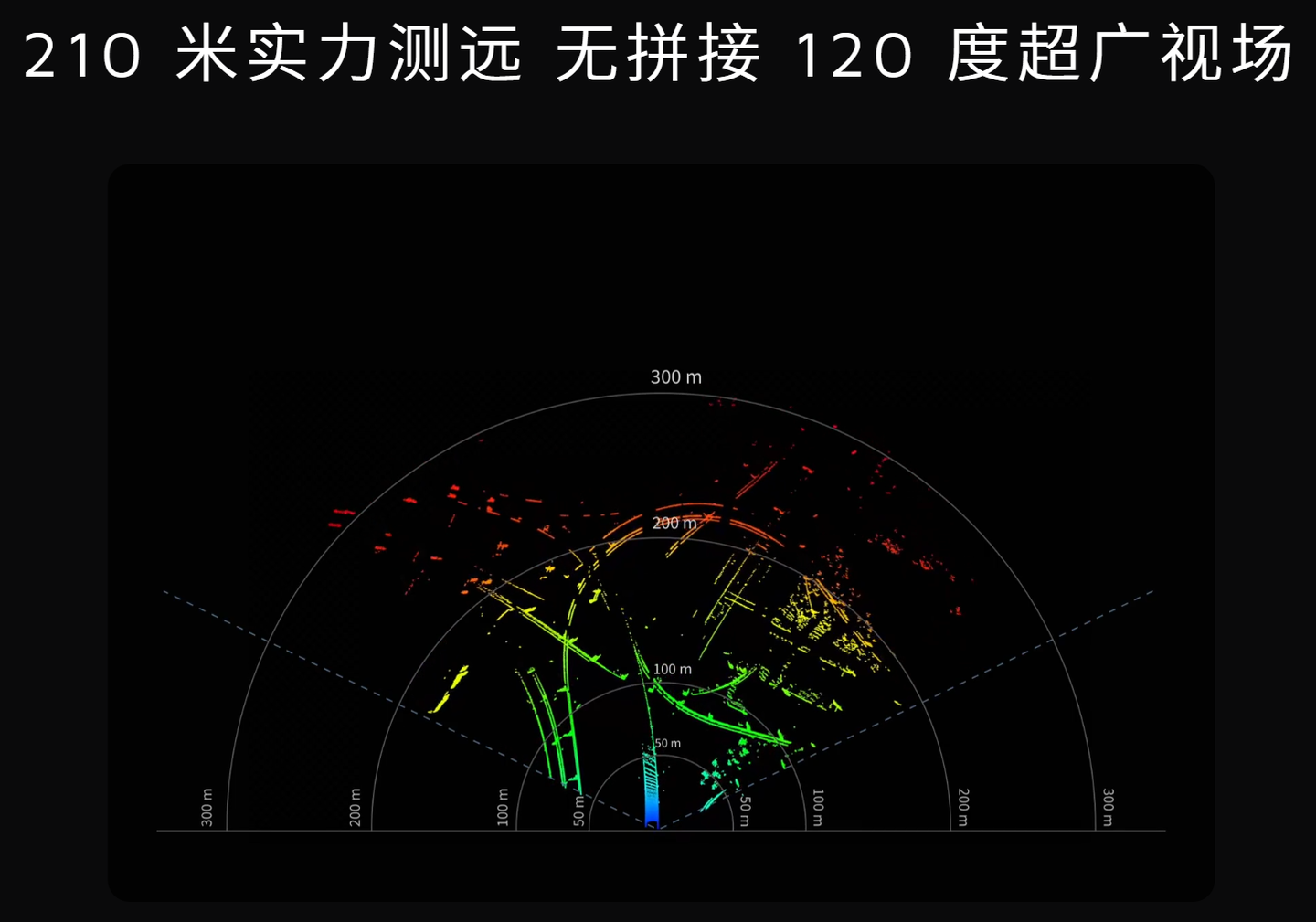
10%的反射率下,以蔚来ET7为例,搭载了来自Innovusion的超远距高精度激光雷达,最远探测距离可达500米,10%反射率标准下的探测距离可达250米,留给车辆预判制动的时间非常长。一般的车型在10%的反射率的条件下,只能做到100-200米的探测距离,留给行车电脑的预判时间很紧张。
以上就说明了Lidar量程的重要性,工作在dToF模式下的Lidar,其量程和Tx功率以及Rx的接受灵敏度强相关
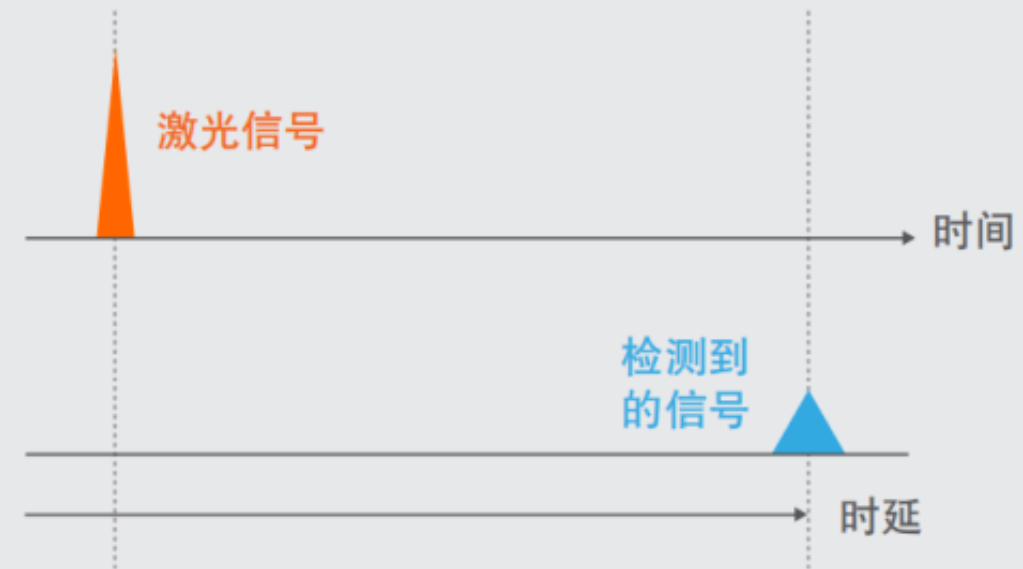
下面的公式是采用不同的光子检测器得到的最大探测距离计算公式。
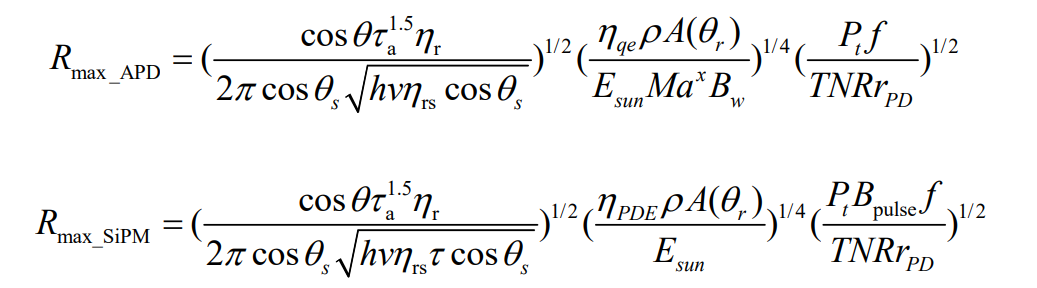
显然,提高量子效率𝜂(qe)或光子探测效率𝜂(PDE)(当前行业水平下𝜂(qe)约为80%,𝜂(PDE)约为20%)、增加接收孔径𝐴(𝜃r)、提高目标反射率𝜌、减少太阳辐射𝐸(sun)、降低APD的过量噪声因子𝑥,都可以增强DToF激光雷达的最大范围。因此,在调整设计参数时,可以使用上述方程计算𝑅(max)相对于这些设计参数的偏导数,以更好地平衡成本和性能收益,并选择最佳设计方案。降低阈值-噪声比(TNR)的设定值也可以增加探测范围,但代价是增加误报率和点云中的噪声点。可以根据场景中实际的点云效果进行具体调整。增加发射光的峰值功率𝑃ₜ并减少接收视场角 𝑟(pd)/𝑓 也可以改善最大范围,前提是遵守激光安全法规(人眼安全)。然而,重要的是要注意到,增加峰值功率将由于激光安全法规而减少脉冲宽度。这就需要增加接收电路的带宽 𝐵w,进而导致噪声和成本的增加。因此,激光峰值功率、发散角、接收视场角和电路带宽的设计需要基于最大范围公式、安全法规、设备特性和成本进行全面考虑。
下文是对Ranging Performance Analysis in Automotive DToF Lidars进行论述的,有兴趣可以参考:
Ref:https://arxiv.org/pdf/2501.17884
下图是禾赛的ETX Lidar的自研芯片提出探测距离。

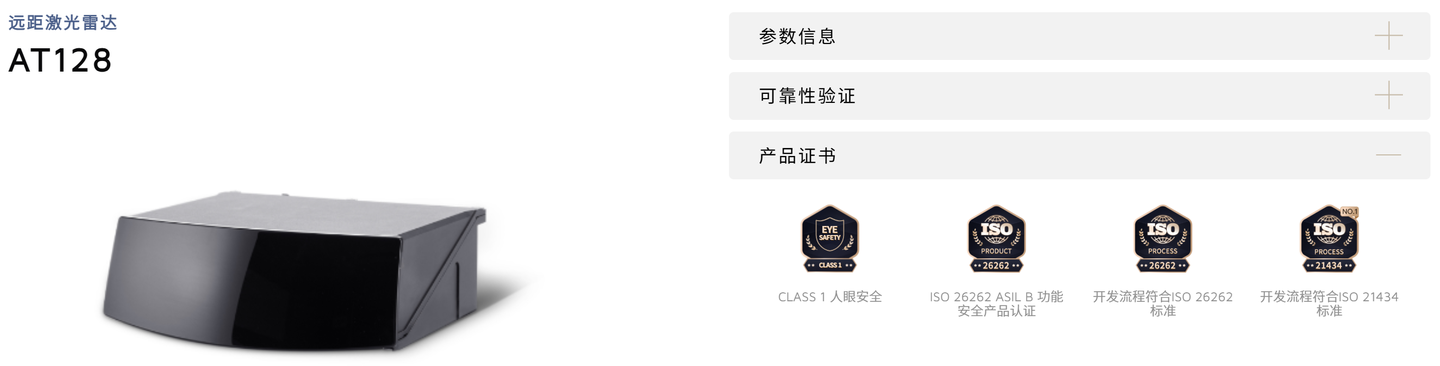
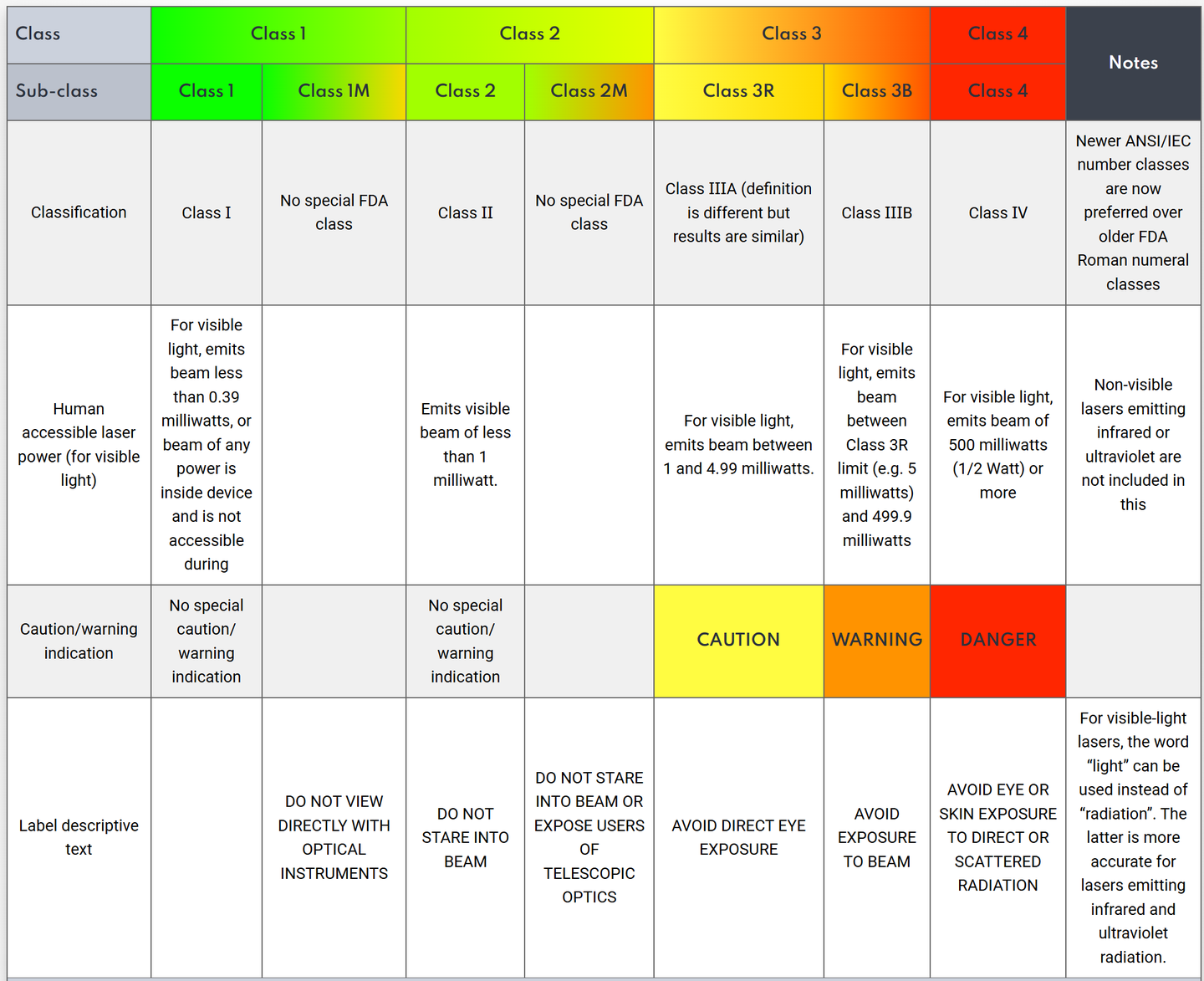
3、Lidar的人眼安全等级说明
人眼安全的要求如下
中国要求:目前激光人眼安全在国内没有强制性认证要求,但有强制性标准GB 7247.1,国内上市激光产品需满足激光人眼安全要求。需要注意的是GB 7247.1采标IEC 60825-1。
美国要求:激光产品进入美国需要满足FDA辐射放射的要求。除了限值激光产品的设计和结构上满足人眼激光安全要求。制造商还要能保证良好生产规范使得批量产品持续满足要求。FDA通过产品型式试验+企业质量控制系统要求的方式,要求制造商进行首次报告和年度报告。测试标准可以为21 CFR 1040.10,也可以为IEC 60825-1+Notice 56差异。
其他国家:国际上包括欧洲和其他主要地区均可采用IEC 60825-1(但须注意欧盟EN 60825-1有A11增补,以及需要考虑消费类激光要求EN 50689)。
共同要求:由于激光雷达大多采用905nm和1550nm,均为不可见红外激光,发射过程中不易被用户察觉,并工作场景均为需向外界发射激光辐射,所以均需满足一类激光(Class 1)激光人眼安全要求。
Ref:激光雷达人眼安全认证
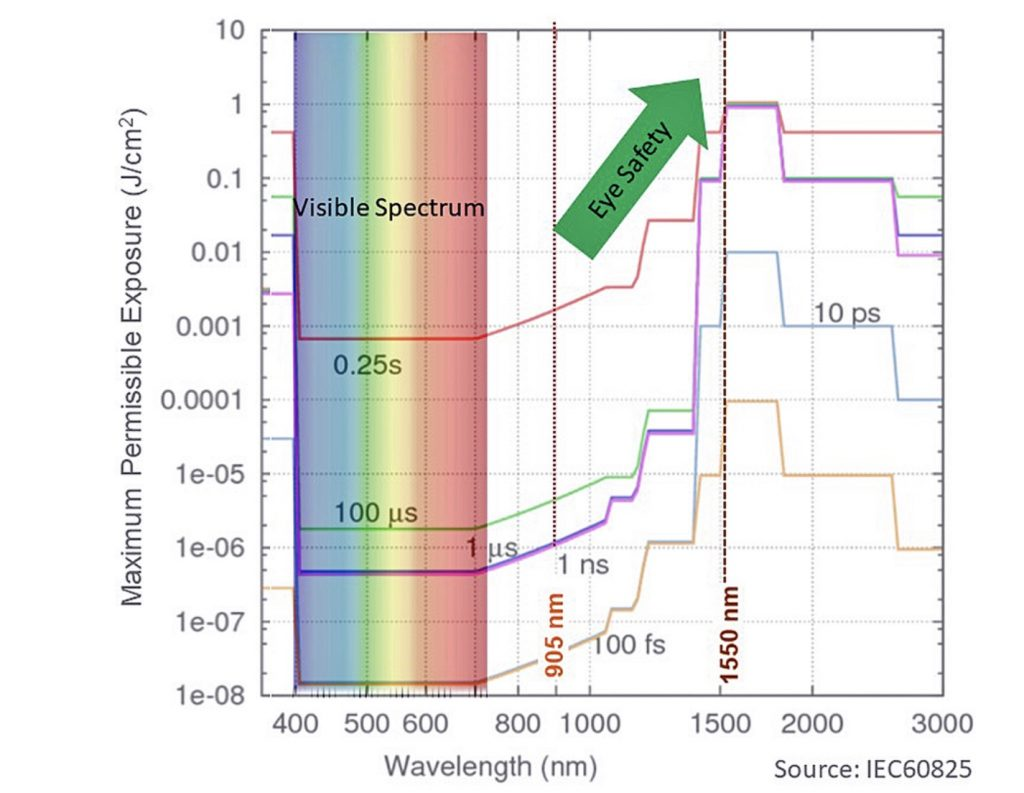
由于905nm 更接近可见光,视网膜对其更敏感,同时液态水对其吸收也更少,因此这种光线更容易直达视网膜。相比而言,1550nm 容易被水吸收,因此在抵达视网膜之前已经被玻璃体等前部结构进行一轮吸收,抵达视网膜的较少。同时1550nm 光折射率更大,即便是抵达视网膜,也不容易聚焦成很小的光点,能量相对分散,进一步减小了损伤。
基于以上原因,在连续波情况下,1550nm 激光的人眼安全功率达到905nm 的10 倍,如果是瞬间发光则倍数更多,如果发光控制在纳秒级别(激光雷达通常一个脉冲只有几个纳秒),那么1550nm 激光人眼允许的强度可以更高。
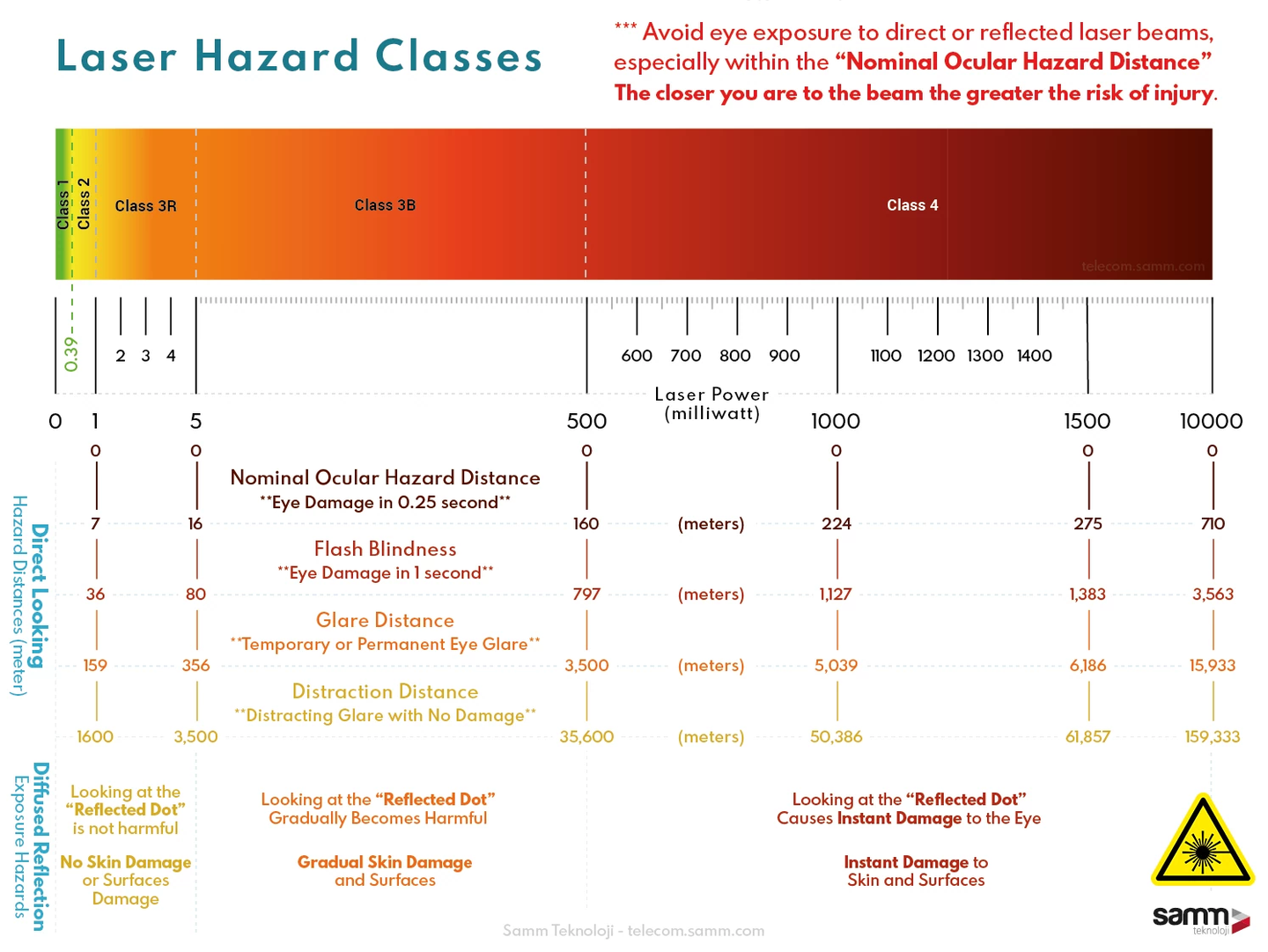
下文对激光危害等级进行了详细的罗列
Ref:Laser Hazard Classes and Eye Safety
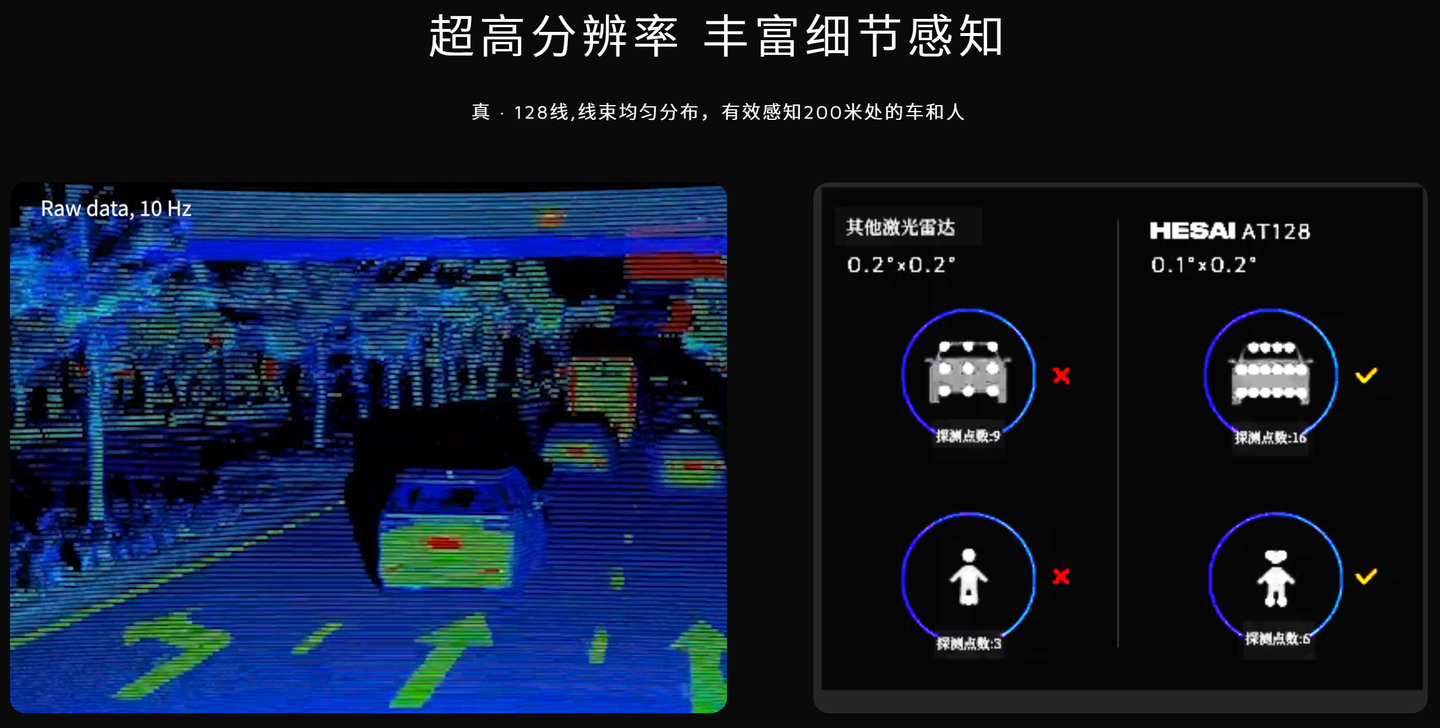
4、Lidar的点频是什么,和什么相关?

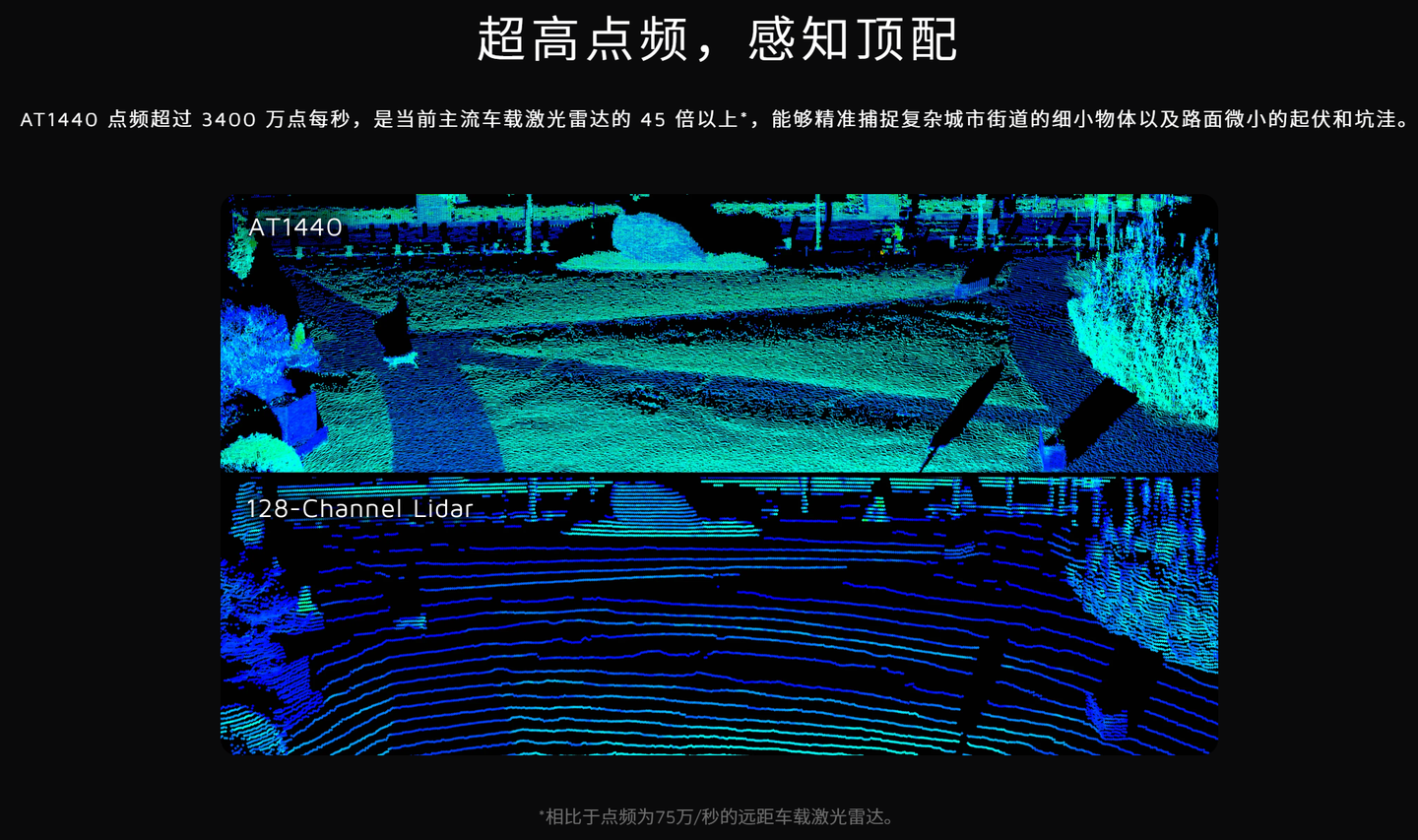
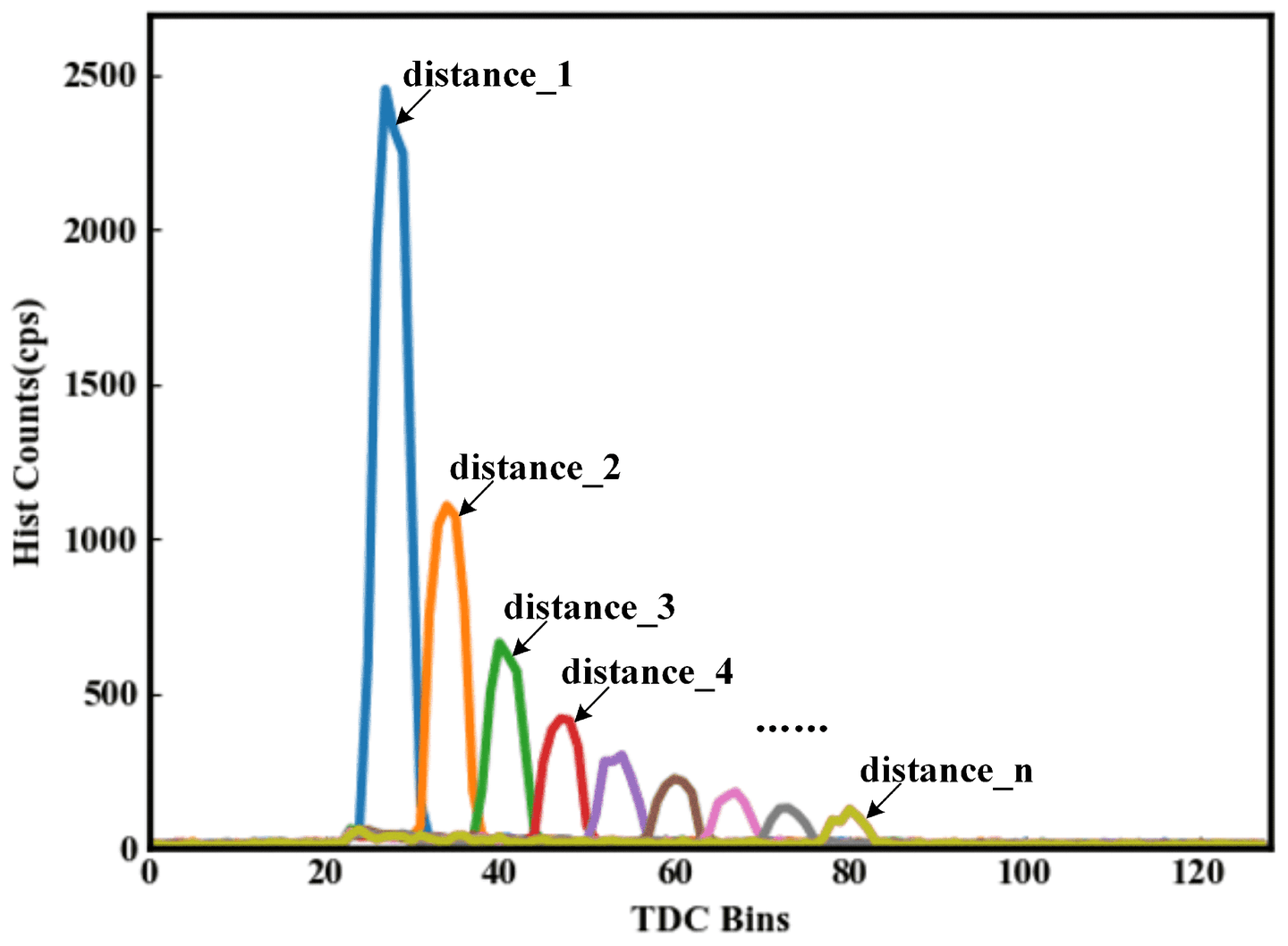
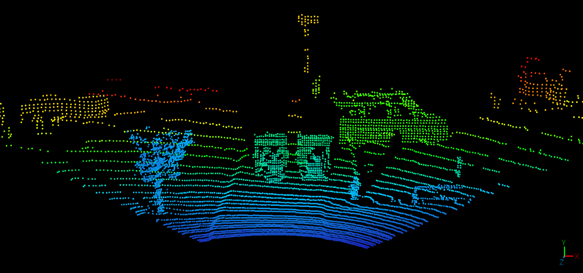
上图给出了禾赛Lidar的点频效果,可以看到点频越高,点云对外部场景的还原度越高,越有利于后端对Lidar点云进行处理的算法。
点频是按照秒计的,计1秒内输出的点云数量,以AT128架构为例,其每秒产生的点云数据点数(即回波数)为1536000点/秒(单回波),计算如下:
-
HFOV=120°,水平角分辨率=0.1°,通道数128(即线数),扫描帧率=10Hz
-
10Hz下,单线每帧产生120/0.1=1200数据点,全通道每帧产生1200*128=153600个数据点;每秒10帧,即1536000个数据点;
-
双回波模式下,有效点频是单回波的两倍。
-
点云传输的工作周期约为50%,因此,峰值传输率约为平均值的两倍左右。
其和Lidar的扫描频率(10Hz帧率)相关的是其中的转镜转速,即每秒转10圈,每圈保障激光束在水平120°范围内完成一次扫描,扫描的步长为0.1°。


对应速腾M1参考图12,水平测角通过振镜水平向的摆动,由于振镜水平向摆动角度有限,所以用5组反射镜,进行拼接,实现水平120°的覆盖,垂直测角通过振镜垂直向的摆动完成,实现垂直向25°的覆盖。
M1的水平和垂直角分辨率均为0.2°,点频为每秒78.7万。
5、Lidar的测量精度问题
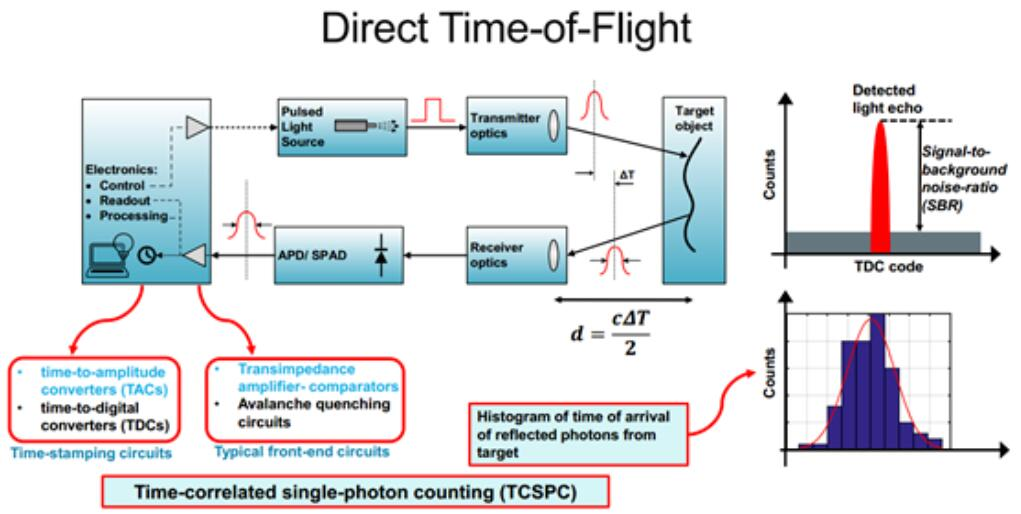
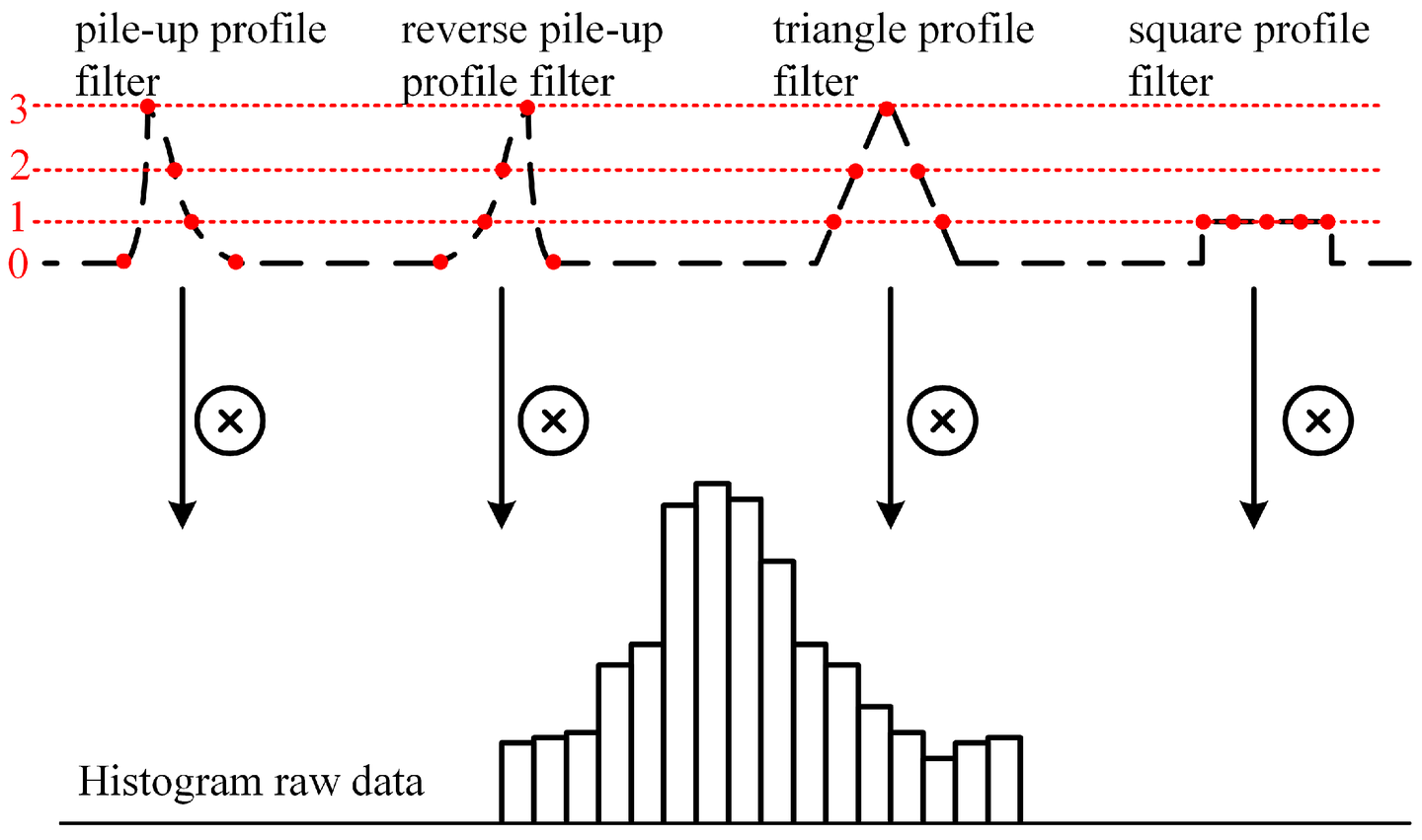
dToF测距技术的核心为生成光子计数的直方图,而直方图的粗细程度则直接决定了测距的精度。当激光脉冲功率较大的时候,产生的直方图需要少量的激光脉冲即可,但是直方图与原始的光强度包络相差较大。而当激光脉冲功率较小的时候,虽然产生一张直方图所需要的激光脉冲数量较多,但是直方图描绘的包络与光强本身的包络曲线符合度较好。
采用不同的脉冲宽度以及不同的Profile Matched Filter可以得到不同的测距精度效果。
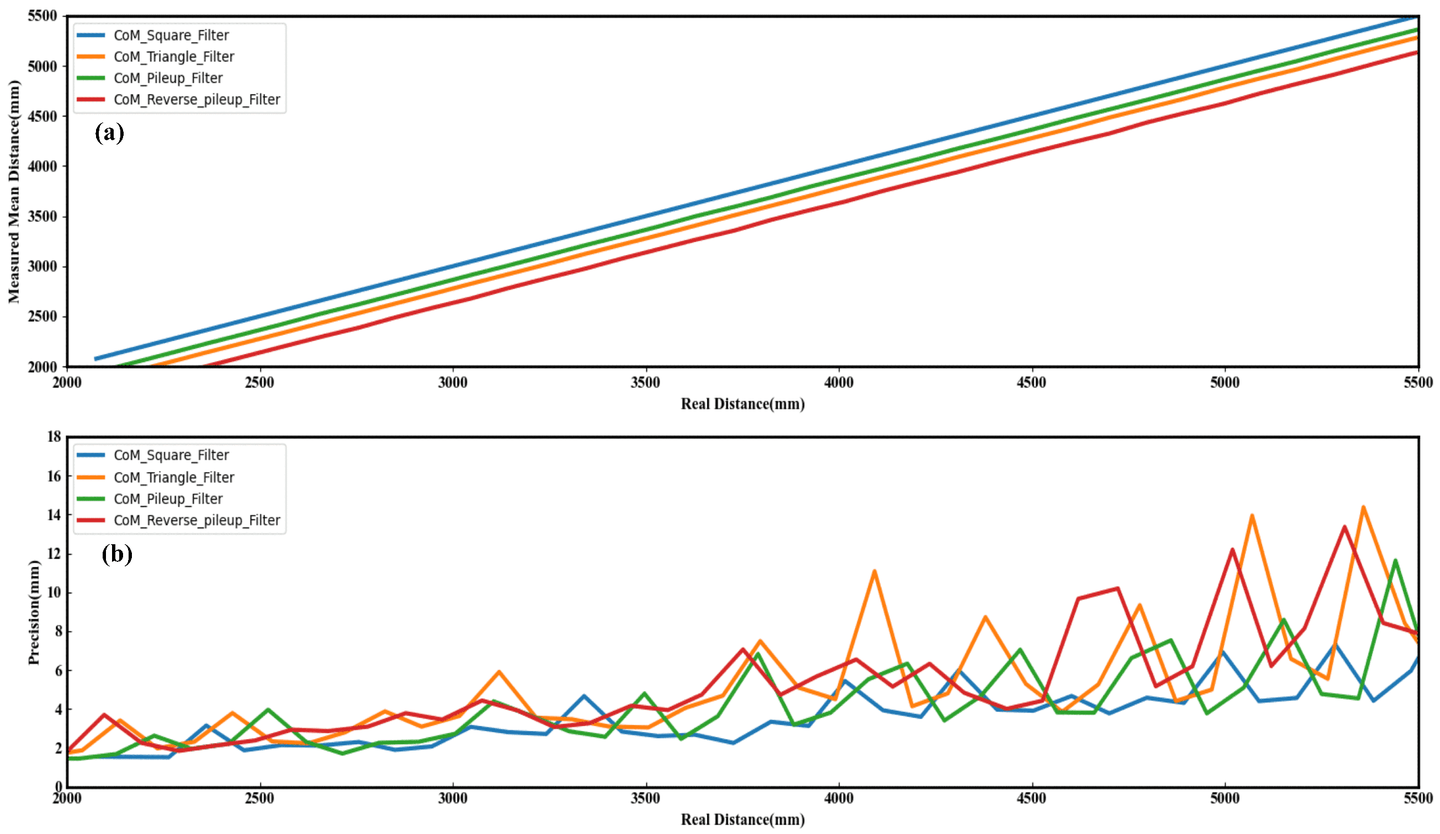

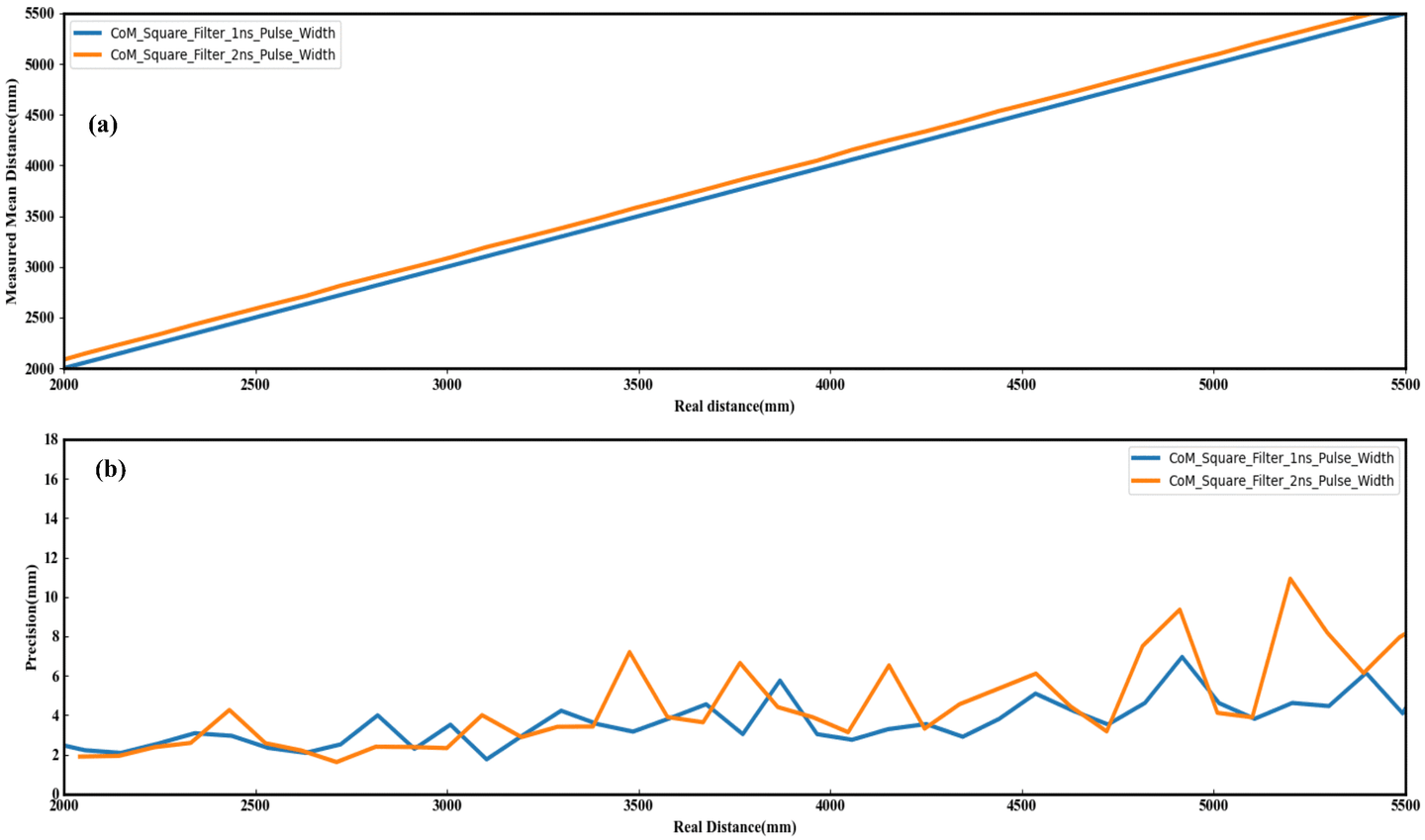
Ref:https://www.mdpi.com/1424-8220/23/6/3011
除了脉冲宽度和匹配滤波器,测量精度还受到目标物的反射率以及外部光强度影响。
6、对以上几点的小结
dTOF激光雷达关键指标
1、量程:所能测量的距离远近。
2、采样率:每秒所能收集的点数据数量。
3、精度:测量准确程度。
4、角度分辨率:由采样率和扫描频率决定的,在2D识别中,角度分辨率的大小决定了所能扫描物体的范围大小。
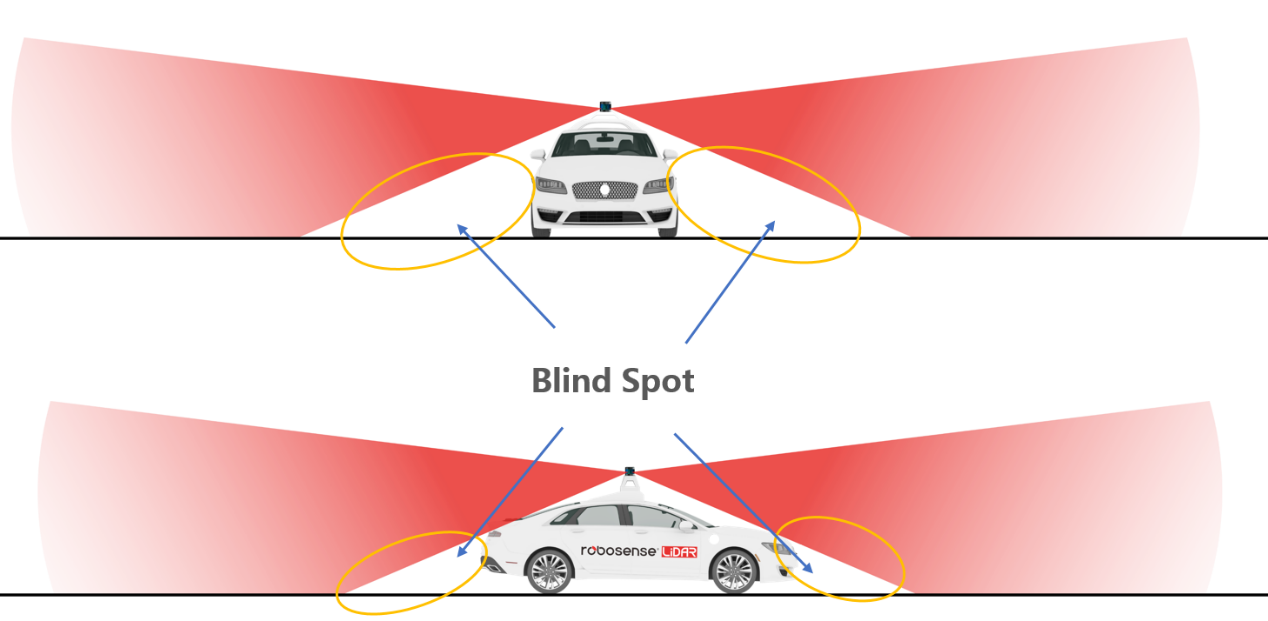
5、盲区:当距离近到一定程度时雷达会识别不到光,这块无法识别的区域被称为盲区。
6、抗光强度:雷达受光线影响的程度,程度越小抗光强度越大。
7、扫描频率:旋转结构的转速。
以上基本将Lidar的关键指标问题都以及说清楚了。盲区的说明如下:
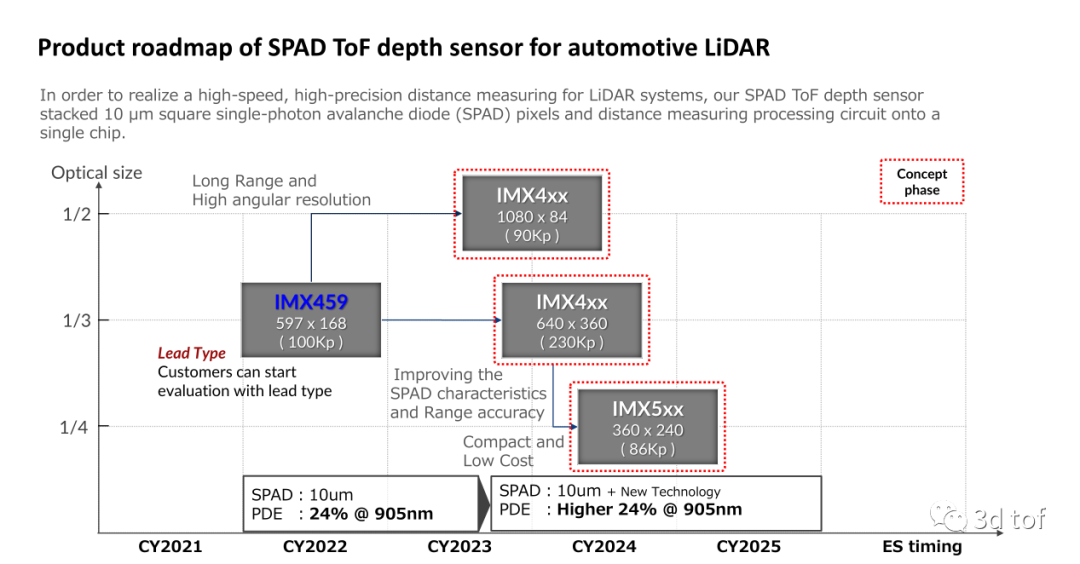
7、对SPAD的补充说明(为什么长距高分辨Lidar采用SPAD)
以下参考了SONY官网的几篇文章:
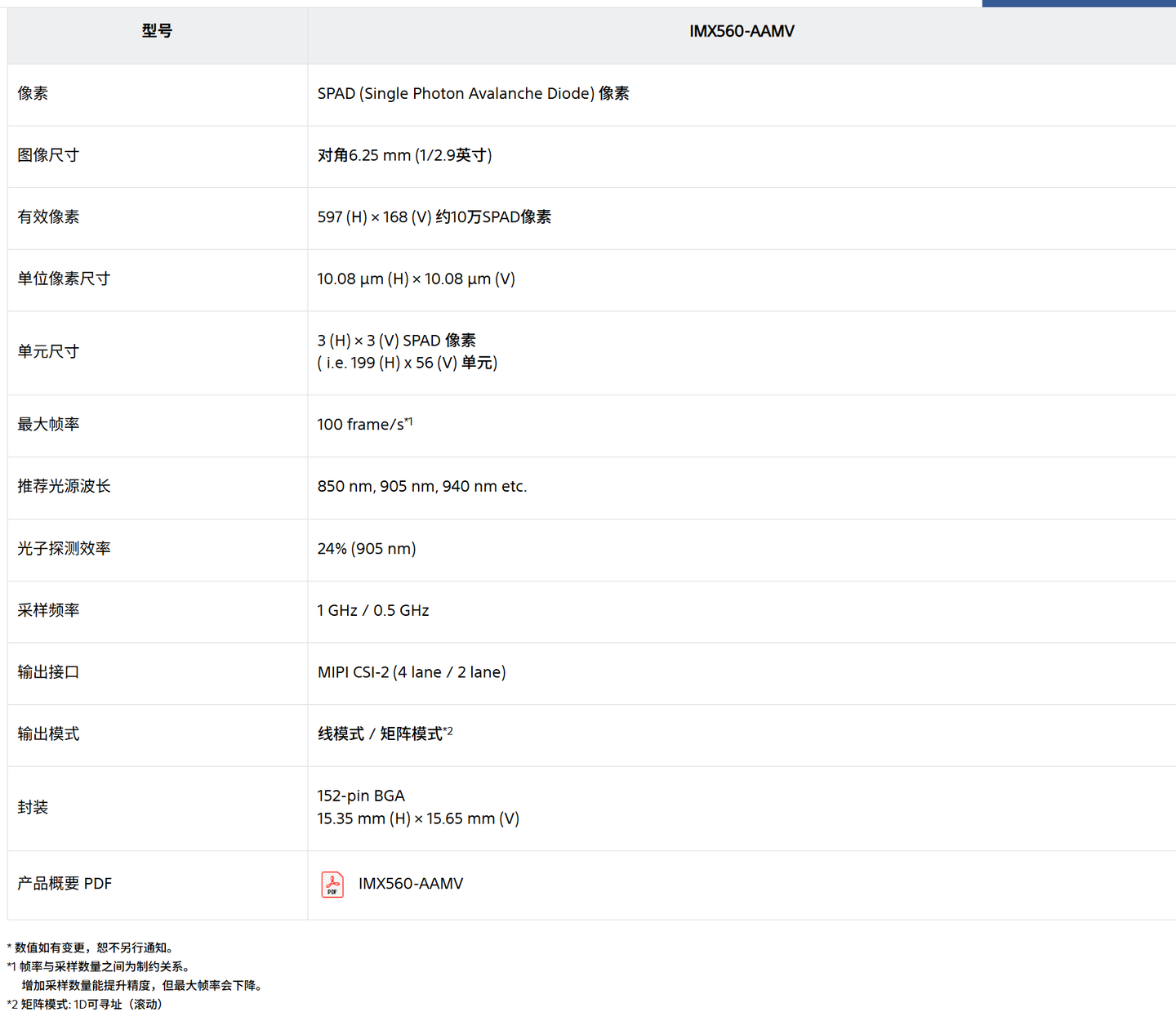
Ref:SPAD ToF式距离传感器 1/2.9英寸 约10万像素 IMX560 | 产业用图像传感器 [概述] | 图像传感器 | 产品・解决方案 | Sony Semiconductor Solutions Group
Ref:索尼发布堆叠式SPAD深度传感器IMX479,助力车载激光雷达实现高精度高速测距
Ref:以领先的光子探测率实现高精度、低功耗测距 索尼发布用于智能手机的SPAD距离传感器
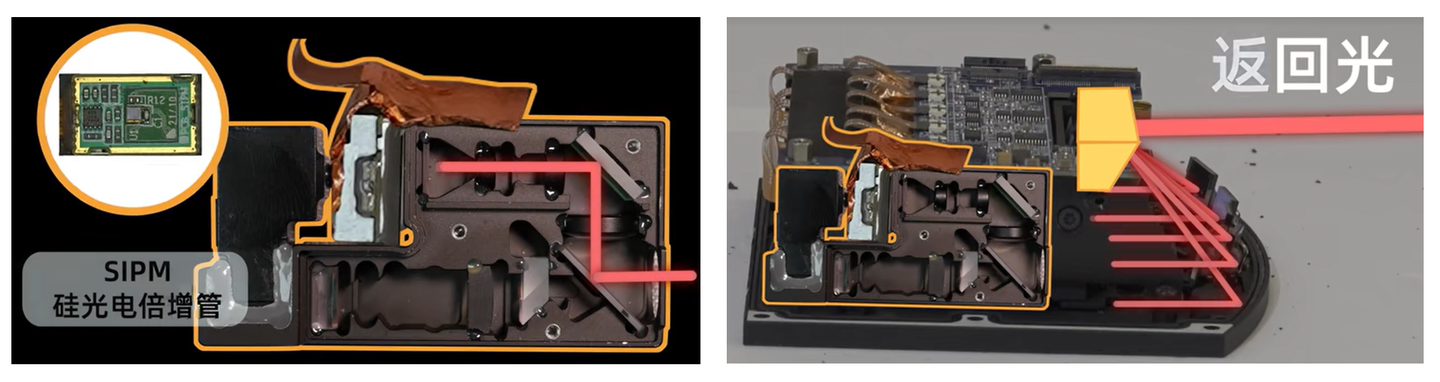
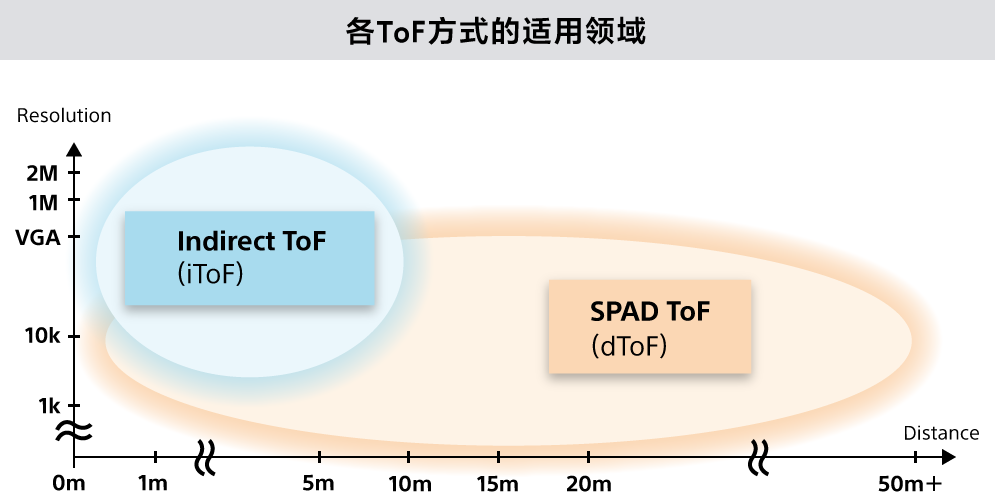
SPAD(Single Photon Avalanche Diode)像素的特点是利用具有“雪崩倍增效应”的像素结构,将单个入射光子的电子放大,从而形成雪崩式叠加,因此能检测到微弱的光。SPAD ToF式距离传感器(以下简称SPAD距离传感器)利用SPAD方式的受光元件检测光的飞行时间,从而实现了长距离、高精度的距离测量。
SPAD距离传感器会在捕获到光子时,以雪崩倍增效应增强电子,从而放大检测到的光子并将其转换为强信号,因此能高精度地检测到从远处返回的微弱光信号。它可以测量数十米以上的距离,相比indirect ToF方式(iToF),能够捕捉大范围的3D信息。
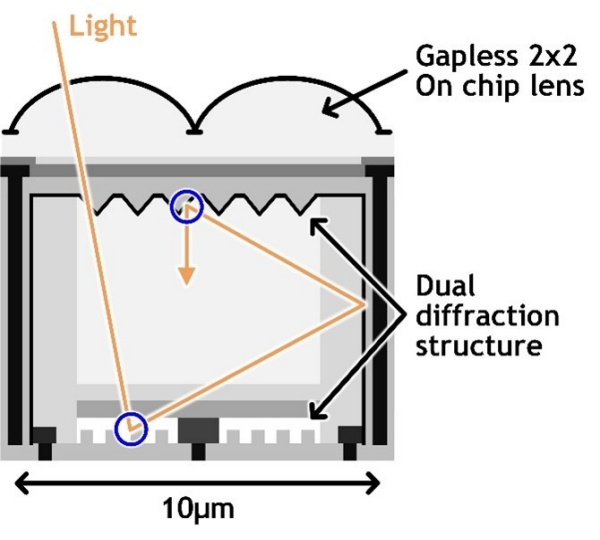
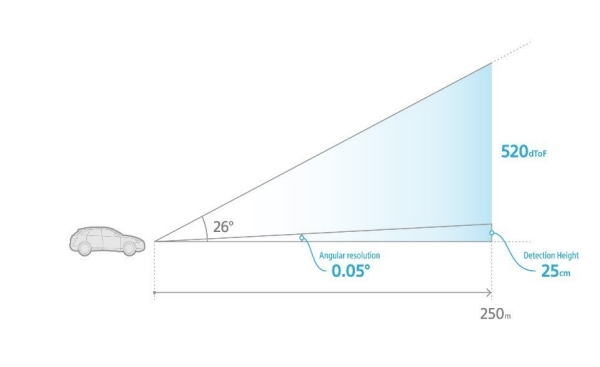
下图中IMX479对像素的光入射面和底面进行了不规则设计,并优化了透镜形状。通过折射入射光来提高吸收率,使车载激光雷达光源常用的940纳米波长达到了37%的光子探测效率。因此,即使在100,000lux以上的强光背景光环境下,也可以高精度地探测和识别最远300米外的目标物体。
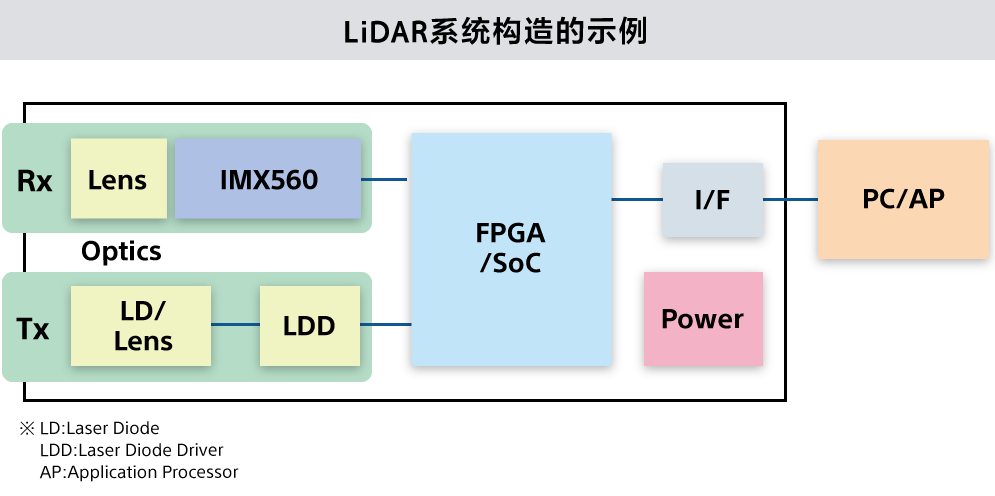
SPAD距离传感器在芯片上搭载了Time-to-Digital转换器,因此可输出数字信号。它采用堆栈结构,并列配置多个Time-to-Digital转换器,从而能够同时对多个点进行测距,实现高分辨率,并以此提升物体的识别精度。
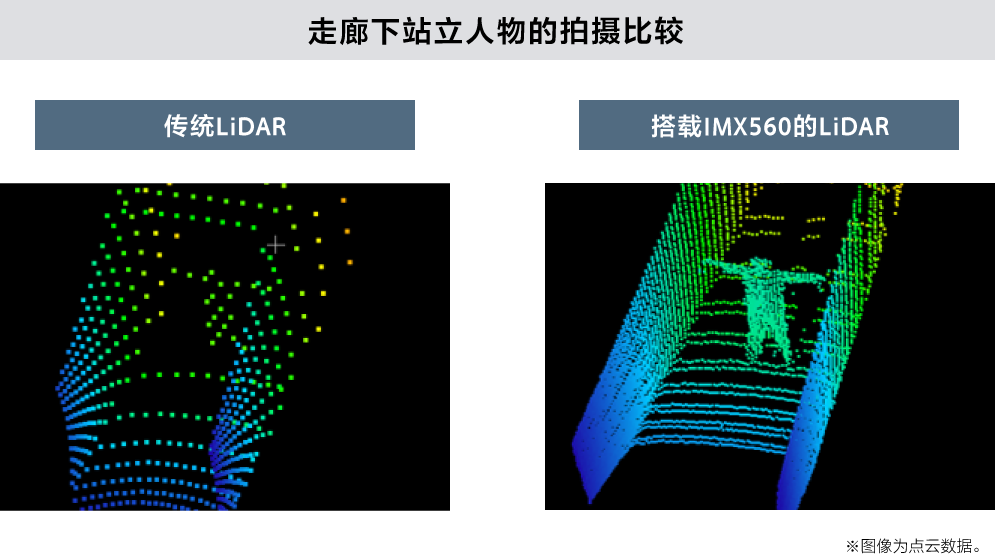
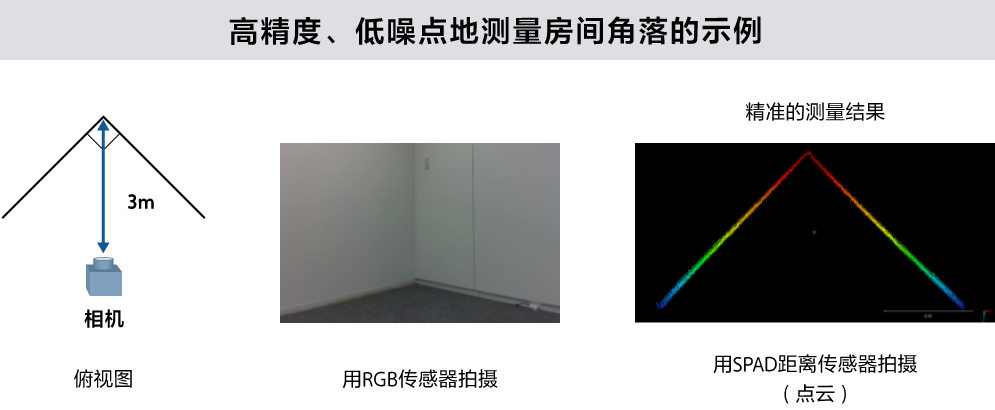
为了准确测量距离,相对于从相机光源发出后、被被摄体反射一次就到达传感器的信号,那些在非预期路径上反射回来的信号需要尽可能被排除。特别是像房间角落这类凹陷的形状,很可能在非预期路径上产生信号光,导致测量值出现偏差。而SPAD ToF的测距方式会多次测量与对象物之间的距离,对获取的各点的测量结果进行统计处理。因此能够稳定获取高精度、低噪点的数据,对角落也能精准测量。由此,可提升测量的可靠性,有望在各种用途上确保精度。

Ref:https://www.mdpi.com/1424-8220/23/15/6927
Ref:https://www.mdpi.com/1424-8220/21/11/3839
Ref:https://imagesensors.org/wp-content/uploads/2018/05/Salvatore_Gnecchi.pdf







)







)
——业务需求文档(BRD))

![[Sync_ai_vid] 唇形同步评判器 | 图像与视频处理器 | GPU测试](http://pic.xiahunao.cn/[Sync_ai_vid] 唇形同步评判器 | 图像与视频处理器 | GPU测试)
