前言
本文主要对智能驾驶规划技术相关知识进行初步探究和总结,以加深理解,及方便后续学习过程中查漏补缺。
分层规划策略
寻径
A*算法
概念
- 节点:网格化后的每一个最小单元
- 父节点:路径规划中用于回溯的节点
- 列表:需要不断的维护
- 开放列表:用于存放待检测节点
- 关闭列表:用于存放已检测节点
- 路径排序F:选择路径的依据F=G+H。找最小路径
- G:从初始位置移动到待检测节点的开销
- H:启发函数。即,每个待检测节点到终点的代价。
算法流程
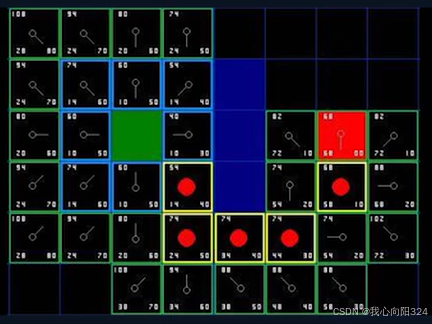
- 建立列表:将初始位置加入开放列表,并检查与之相邻的8个节点,把其中可通行节点(除去障碍物和限行节点)加入到开放列表,并把初始位置设置为这8个节点的父节点,然后把初始位置从开放列表中删除,并将其加入关闭列表。
- 选择移动节点:计算所有开放列表中节点的F值,选择其中最小的作为移动节点。
- 计算最小消耗F=G+H:计算G时允许纵向(10)、横向(10)、斜向(14)移动;计算H时只允许纵向(10)和横向(10)移动,且不考虑障碍物(曼哈顿距离)。
- 更新列表:将选中的节点从开放列表中移除,并加入到关闭列表中,接着检查与之相邻的可通行节点,如果节点不在开放列表中则将他们加入开放列表,并指定选中节点为其父节点;如果节点已经在开放列表中,则检查经过选中节点后F值是否会变小,若是,则重新指定父节点,若否,则不进行任何操作。
- 选择移动节点:计算开放列表中所有节点的F值,选择其中最小的作为移动节点。
- 更新列表:(循环)
- 更新选中节点:(循环)
- 循环过程:重复更新列表和更新选中节点两个步骤,直至重点位置出现在开放列表中。
- 找到路径:从目标位置开始,沿着父节点指向,反向找回初始位置,即可得到路径。
- 示例
A*算法评价
- 全局最优的路径规划
- 对环境建模要求高,不仅要已知,还要网格化
- 环境越复杂,每个迭代过程中需要维护的开放列表会越大
车辆行为决策
输入
- 规划路径、驾驶情况(交通规则、路况)
输出
- 车辆行为(速度保持、前车跟随、减速停车、驻车、主动变道)
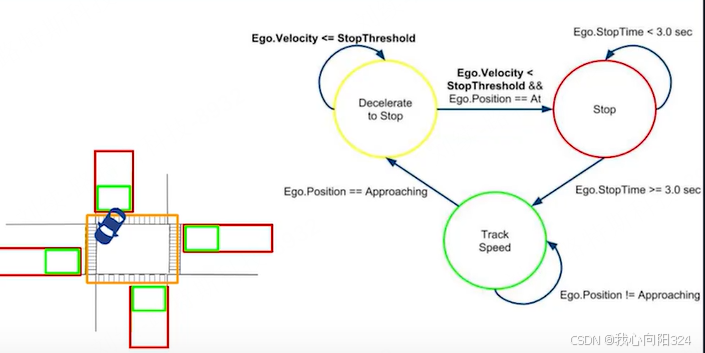
状态机建立
- 状态(每个状态对应一个车辆行为)
- 转变(从一个状态到另一个状态)
- 转变条件(状态发生转变需要符合的规则)
- 状态动作(车辆行为的约束)
- 示例
运动路径生成
局部运动路径生成
静态障碍物
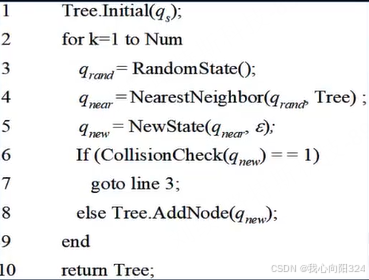
快速扩展随机树方法(RRT)
- 随机树生长
- 选择起点qs作为树的根节点,通过扩展叶节点的方式建立随机树。
- 从随机树当前所有的叶节点中,选择一个距离qrand最近的节点,成为qnear,从qnear向qrand的方向延伸一个固定步长的距离,得到一个新的节点qnew,并以qnear为qnew的父节点,若qnew与障碍物发生冲突则放弃该节点,重复以上过程,直至qnew与目标距离足够小。
- 路径反向搜索
- 以距离目标位置最近的叶节点为起始,依次向上搜索父节点,则可获得一条从起始位置到目标位置的可行路径。 (注:和A*算法类似)
- 伪代码
- RTT算法评价
- 具有完备性
- 计算量大,规划效率低
- 规划路径不平滑
动态障碍物
人工势场法(APF)
- 势场中的物体受到引力势场和斥力势场的综合作用,向势能最低处运动。
- 势场的构建
- 引力势场:势场大小与距离平方成正比,范围全局
- 斥力势场:势场大小与距离平方成反比,范围局部
- 势场力(势场负梯度)
- 引力:方向从物体指向目标点
- 斥力:方向从障碍物指向物体
- 合力:物体在合力作用下,实时生成路径
- APF算法评价
- 在线规划,路径平滑
- 只需考虑视野内的障碍物
- 参数选择对效果影响较大
- 会存在局部极小和徘徊现象


数据库迁移实战:Spring Boot项目完整迁移指南)



的用途)



:Transformer 架构详解(程序员视角・实战版))
:任务执行与切换)



)
)


