这篇文章是 STM32 HAL + FreeRTOS 下的任务挂起与恢复机制, 结合 CubeMX 图示与代码,构建了一个 FreeRTOS 控制示例。
本篇目标:
创建两个任务:
一个控制蓝灯闪烁(myTask01)
另一个监控按键(StartTask),实现对蓝灯任务的挂起与解挂功能
一、FreeRTOS 中任务挂起和恢复的机制
| 操作 | 函数 | 说明 |
|---|---|---|
| 挂起任务 | vTaskSuspend(TaskHandle_t xTaskToSuspend) | 将任务状态置为挂起,调度器不再调度它 |
| 恢复任务 | vTaskResume(TaskHandle_t xTaskToResume) | 重新激活任务,使其进入就绪态 |
| 自我挂起 | vTaskSuspend(NULL) | 当前任务挂起自身 |
| 查询状态 | 可用 eTaskGetState() 获取任务状态 |
🧩当前的任务设计逻辑
✅ 控制任务:StartDefaultTask
- 使用 GPIO 输入读取按键(PC1)
- 实现一次性按键触发检测(Trg 边沿检测)
- 判断标志位
TaskState来控制挂起/恢复 - 使用
vTaskSuspend()/vTaskResume()控制蓝灯任务
✅ 被控制任务:myTask01
- 闪烁蓝灯(PC8)
- 每 500ms 翻转一次
✅ 运行效果说明
操作 现象
上电后 蓝灯开始闪烁
按下按键一次 蓝灯停止闪烁,串口输出 “Suspend”
再次按下按键 蓝灯继续闪烁,串口输出 “Resume”
🛠️二、CubeMX 配置说明
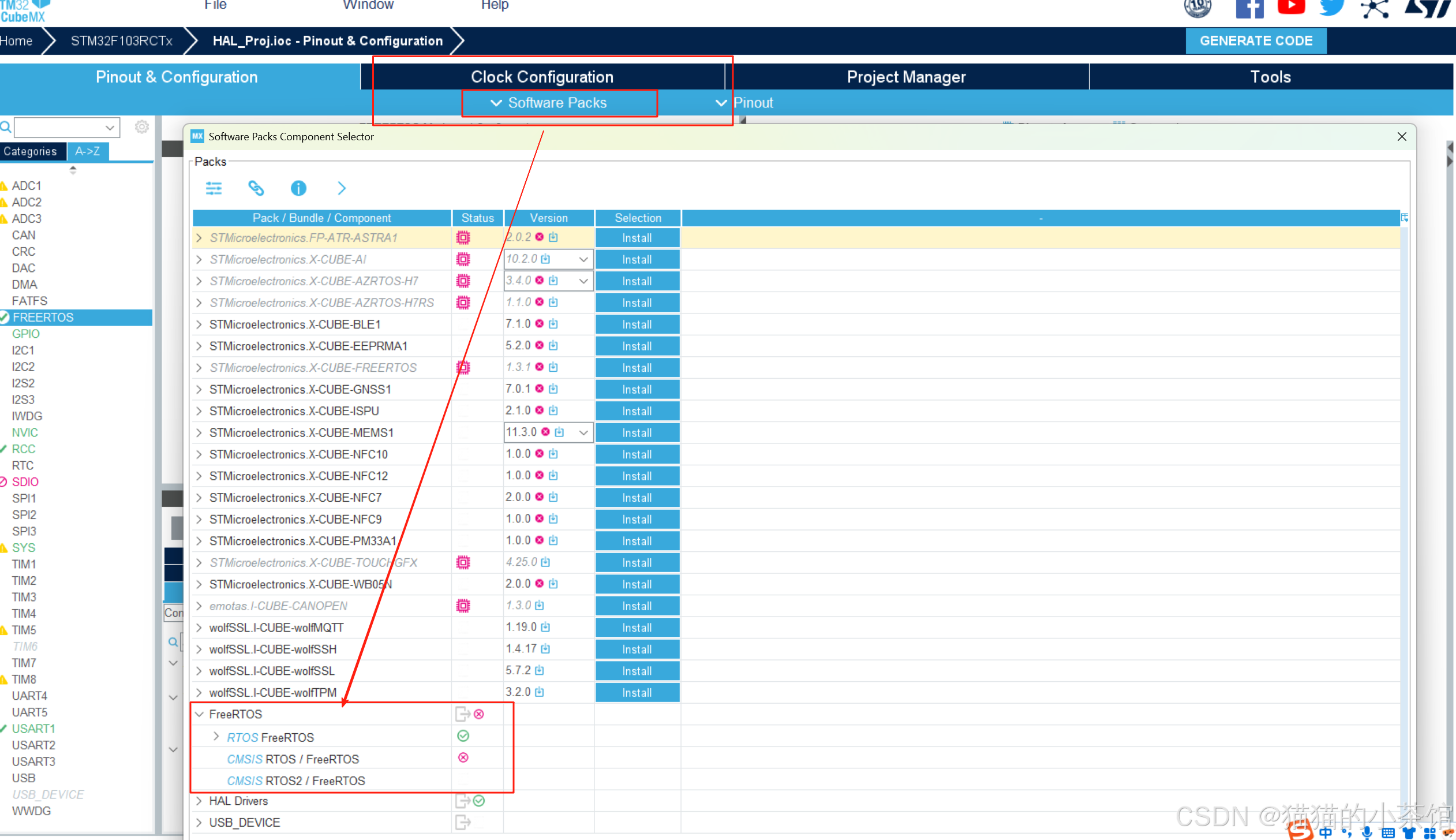
✅ 1. 启用 FreeRTOS 软件包
见图:通过 Software Packs → X-CUBE-FREERTOS 添加 RTOS 支持。
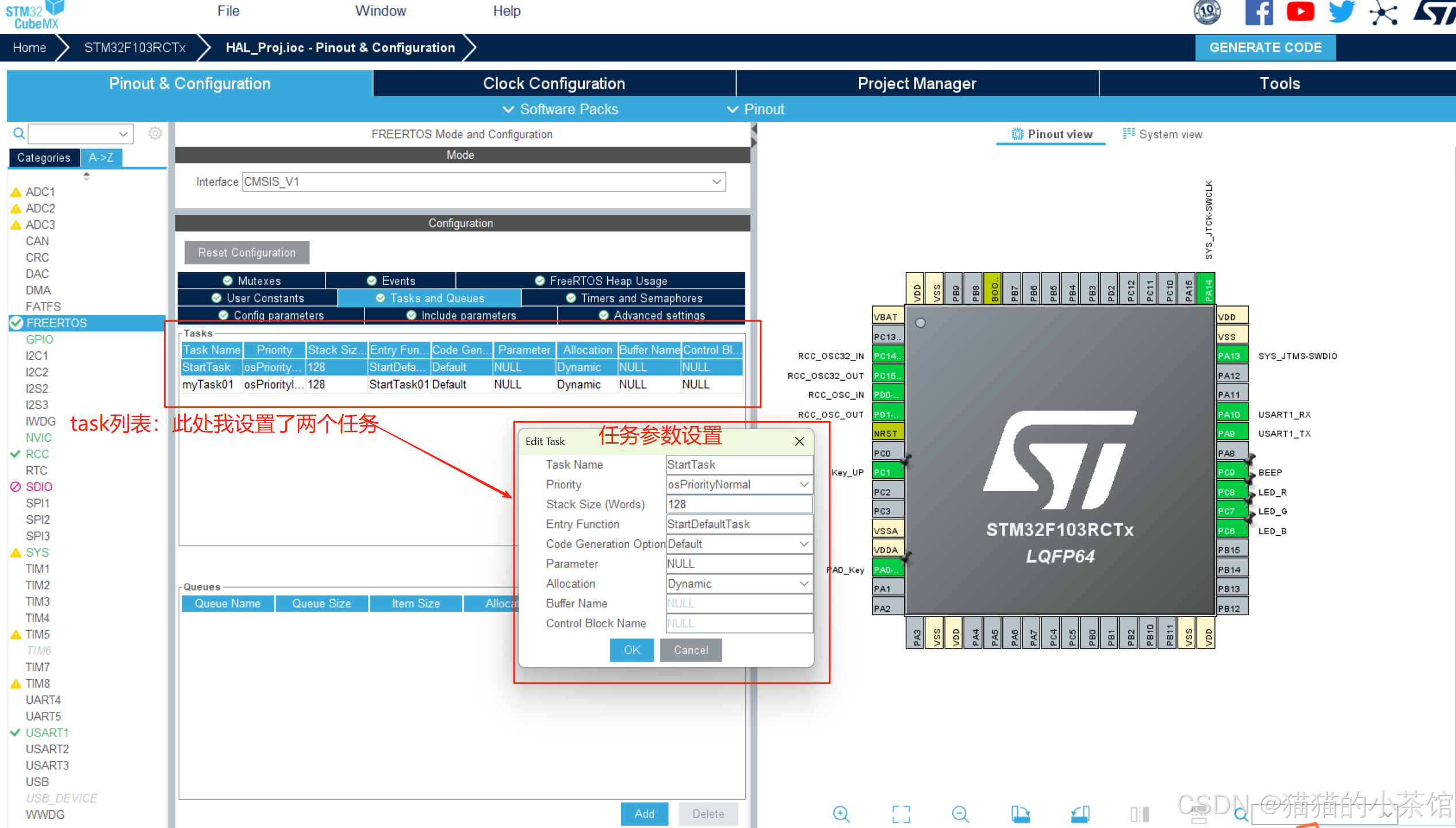
✅ 2. 配置任务列表
在 Tasks and Queues 中设置两个任务 StartTask 和 myTask01
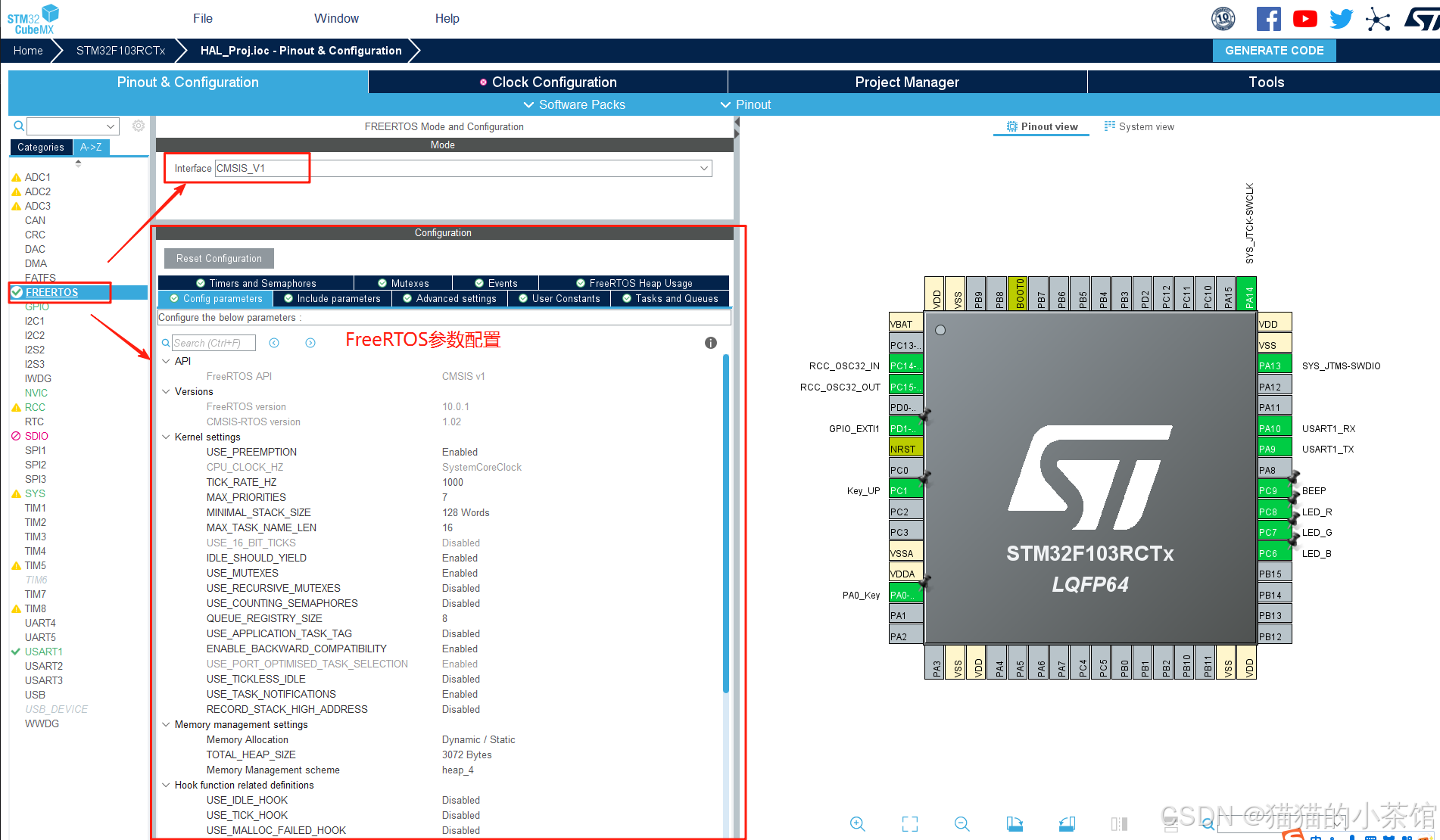
✅ 3. FreeRTOS 参数配置
启用 USE_PREEMPTION、堆大小、栈大小等
🧩三、代码逻辑解析
✅ 1. 按键检测(边沿触发)
unsigned char ReadData = HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_1)^0xFF;
Trg = ReadData & (ReadData ^ Cont); // 上升沿检测
Cont = ReadData;
Trg:触发信号,仅在状态变化的那一拍为 1Cont:当前电平状态
✅ 2. StartTask 任务控制逻辑
if( Trg == 1 ) // 按键按下
{TaskState = !TaskState;if ((myTask01Handle != NULL) && (TaskState == 0)){vTaskSuspend(myTask01Handle);printf("myTask01 is Suspend ! \r\n");}else if ((myTask01Handle != NULL) && (TaskState == 1)){vTaskResume(myTask01Handle);printf("myTask01 is Resume ! \r\n");}
}
🔹 说明:
Trg是按键触发标志,代表边沿检测TaskState作为状态标记,记录当前任务是否处于挂起状态vTaskSuspend()真正将任务挂起vTaskResume()将任务恢复
✅ 3. myTask01 任务内容(蓝灯闪烁)(控制 PC8)
void StartTask01(void const * argument)
{for(;;){HAL_GPIO_TogglePin(LED_B_GPIO_Port, LED_B_Pin);osDelay(500);}
}
- 每 500ms 闪烁一次
- 被挂起时,FreeRTOS 不再调度此任务,效果就是“蓝灯停止闪烁”
完整代码
📄 main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2025 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "string.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void MX_FREERTOS_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */HAL_UARTEx_ReceiveToIdle_IT( &huart1 , U1RxData, U1RxDataSize);/* USER CODE END 2 *//* Call init function for freertos objects (in freertos.c) */MX_FREERTOS_Init();/* Start scheduler */osKernelStart();/* We should never get here as control is now taken by the scheduler *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief Period elapsed callback in non blocking mode* @note This function is called when TIM6 interrupt took place, inside* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment* a global variable "uwTick" used as application time base.* @param htim : TIM handle* @retval None*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{/* USER CODE BEGIN Callback 0 *//* USER CODE END Callback 0 */if (htim->Instance == TIM6) {HAL_IncTick();}/* USER CODE BEGIN Callback 1 *//* USER CODE END Callback 1 */
}/*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
📄 freertos.c
/* USER CODE BEGIN Header */
/********************************************************************************* File Name : freertos.c* Description : Code for freertos applications******************************************************************************* @attention** Copyright (c) 2025 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header *//* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables *//* USER CODE END Variables */
osThreadId StartTaskHandle;
osThreadId myTask01Handle;/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes *//* USER CODE END FunctionPrototypes */void StartDefaultTask(void const * argument);
void StartTask01(void const * argument);void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) *//* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;*ppxIdleTaskStackBuffer = &xIdleStack[0];*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;/* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY *//*** @brief FreeRTOS initialization* @param None* @retval None*/
void MX_FREERTOS_Init(void) {/* USER CODE BEGIN Init *//* USER CODE END Init *//* USER CODE BEGIN RTOS_MUTEX *//* add mutexes, ... *//* USER CODE END RTOS_MUTEX *//* USER CODE BEGIN RTOS_SEMAPHORES *//* add semaphores, ... *//* USER CODE END RTOS_SEMAPHORES *//* USER CODE BEGIN RTOS_TIMERS *//* start timers, add new ones, ... *//* USER CODE END RTOS_TIMERS *//* USER CODE BEGIN RTOS_QUEUES *//* add queues, ... *//* USER CODE END RTOS_QUEUES *//* Create the thread(s) *//* definition and creation of StartTask */osThreadDef(StartTask, StartDefaultTask, osPriorityNormal, 0, 128);StartTaskHandle = osThreadCreate(osThread(StartTask), NULL);/* definition and creation of myTask01 */osThreadDef(myTask01, StartTask01, osPriorityIdle, 0, 128);myTask01Handle = osThreadCreate(osThread(myTask01), NULL);/* USER CODE BEGIN RTOS_THREADS *//* add threads, ... *//* USER CODE END RTOS_THREADS */}/* USER CODE BEGIN Header_StartDefaultTask */
/*** @brief Function implementing the StartTask thread.* @param argument: Not used* @retval None*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{/* USER CODE BEGIN StartDefaultTask */
// static uint16_t KeyTime = 0;
// static bool KeyFlag = 0;static unsigned char Trg = 0,Trg_last = 0;static unsigned char Cont = 0xFF,Cont_last = 0xFF;bool TaskState = 0;/* Infinite loop */for(;;){unsigned char ReadData = HAL_GPIO_ReadPin( GPIOC, GPIO_PIN_1)^0xff; // 1Trg = ReadData & (ReadData ^ Cont); // 2Cont = ReadData; if(Trg != Trg_last){Trg_last = Trg;printf("Trg = %d \r\n",Trg);}if(Cont != Cont_last){Cont_last = Cont;printf("Cont = %d \r\n",Cont);}if( Trg == 1){TaskState = !TaskState;if((myTask01Handle != NULL) && (TaskState == 0)){vTaskSuspend( myTask01Handle );printf("myTask01 is Suspend ! \r\n");}if((myTask01Handle != NULL) && (TaskState == 1)){vTaskResume( myTask01Handle );printf("myTask01 is Resume ! \r\n");}}osDelay(1);}/* USER CODE END StartDefaultTask */
}/* USER CODE BEGIN Header_StartTask01 */
/**
* @brief Function implementing the myTask01 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask01 */
void StartTask01(void const * argument)
{/* USER CODE BEGIN StartTask01 *//* Infinite loop */for(;;){HAL_GPIO_TogglePin(LED_B_GPIO_Port, LED_B_Pin);osDelay(500);}/* USER CODE END StartTask01 */
}/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application *//* USER CODE END Application */
串口调试效果验证
Cont = 254
Trg = 1
Cont = 255
myTask01 is Resume !Trg = 1
myTask01 is Suspend !Trg = 1
myTask01 is Resume !
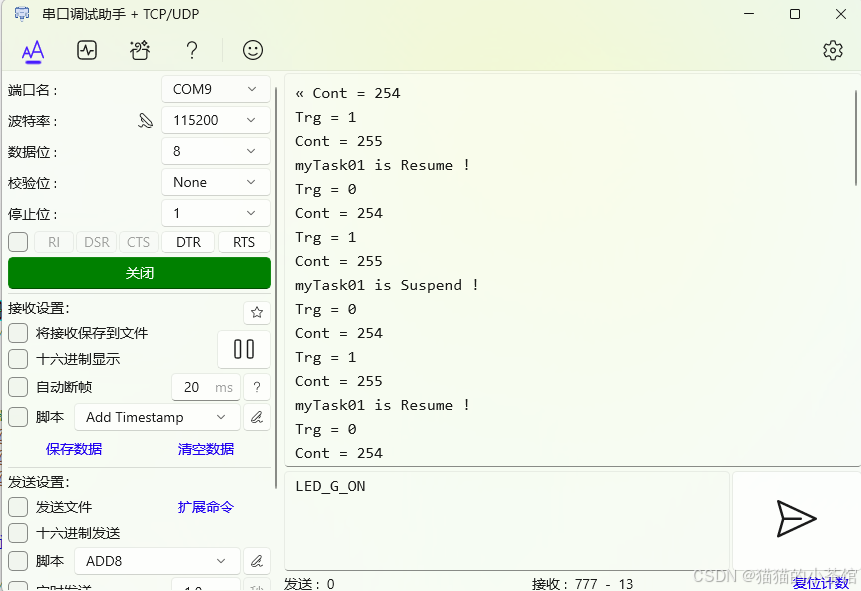
✅ 表示按下按键 → 蓝灯任务切换状态 → 串口实时反馈。
实验效果
| 操作 | 现象 |
|---|---|
| 上电后 | 蓝灯开始闪烁 |
| 按一次按键 | 蓝灯停止闪烁,串口输出:Suspend |
| 再按一次 | 蓝灯恢复闪烁,串口输出:Resume |
调试中可能出现的问题
问题 排查点
蓝灯不闪 myTask01 没创建成功?GPIO初始化错误?
按键无效 检查引脚是否浮空?是否加了外部上拉?
无串口输出 UART 是否初始化?是否重定向 printf?
蓝灯不停切换状态 是否做了按键消抖?是否误触发?
我们还可以在此基础之上,加入按键消抖定时器避免连续触发; 使用中断 + 信号量控制,提高效率,避免轮询;增加多任务共享控制,控制多个任务挂起/恢复;还可以新增 OLED 显示任务状态,更直观展示任务运行。
以上。利用 HAL 库 + FreeRTOS,结合 vTaskSuspend 和 vTaskResume 任务挂起与解挂,可以非常灵活地控制任务运行状态,实现任务级能耗管理、资源调度和交互控制等高级功能。
以上,欢迎有从事同行业的电子信息工程、互联网通信、嵌入式开发的朋友共同探讨与提问,我可以提供实战演示或模板库。希望内容能够对你产生帮助!






- KMS Panel框架层(drm_panel.c、drm_mipi_dbi.c、drm_mipi_dsi.c))






)
)

 egui (0.32.1) 学习笔记(逐行注释)(七) 鼠标在控件上悬浮时的提示)


