以下是在 Ubuntu 20.04 系统上的操作,tpc_c_cplusplus 他是把编译的流程都给写进去了,你只需要关注你要编译的库配置好环境就行了。
第一步:下载 tpc_c_cplusplus 仓库地址:
GitCode - 全球开发者的开源社区,开源代码托管平台
openharmony-sig 组织已经写好了脚本,先进入他的 thirdparty 目录下,找你想要编译的库;
第二步:如果你里有你需要用的库,就进入到 lycium 目录下,开始尝试编译; 以 libxml2 为例编译;
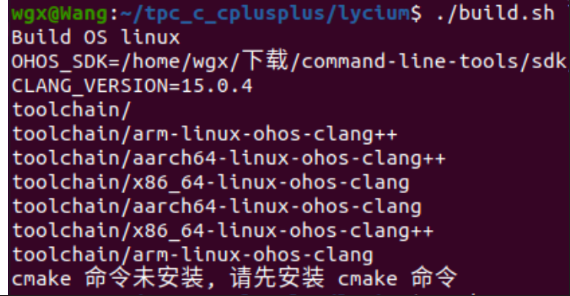
./build.sh libxml2这个时间,如果你没配置环境变量,他会提示你的;

第三步: 配置环境变量:配置前去 下载中心 下载 command Line Tools for HarmonyOS,下载完配置好 OHOS_SDK 以及其他编译需要用到的工具,你可以配置到全局,我这里就临时配置一下:
export OHOS_SDK=~/home/command-line-tools/sdk/default/openharmonyexport AS=${OHOS_SDK}/native/llvm/bin/llvm-as
export CC="${OHOS_SDK}/native/llvm/bin/clang --target=aarch64-linux-ohos"
export CXX="${OHOS_SDK}/native/llvm/bin/clang++ --target=aarch64-linux-ohos"
export LD=${OHOS_SDK}/native/llvm/bin/ld.lld
export STRIP=${OHOS_SDK}/native/llvm/bin/llvm-strip
export RANLIB=${OHOS_SDK}/native/llvm/bin/llvm-ranlib
export OBJDUMP=${OHOS_SDK}/native/llvm/bin/llvm-objdump
export OBJCOPY=${OHOS_SDK}/native/llvm/bin/llvm-objcopy
export NM=${OHOS_SDK}/native/llvm/bin/llvm-nm
export AR=${OHOS_SDK}/native/llvm/bin/llvm-ar
export CFLAGS="-fPIC -D__MUSL__=1"
export CXXFLAGS="-fPIC -D__MUSL__=1"配置好后, 再运行:
./build.sh libxml2
如果你还有工具没有安装, 他会提示你,我第一次的时候,就遇到了 cmake 没有安装的提示:
然后, 这里安装完后,还是有问题,我用默认安装的 cmake 的版本有点低,如果你也遇到,可以去下载这个:
wget https://github.com/Kitware/CMake/releases/download/v3.28.3/cmake-3.28.3-linux-x86_64.tar.gz下载完后,配置到PATH:cmake --version 查一下当前使用的版本是对的;
export PATH=~/wgx/cmake-3.28.3-linux-x86_64/bin:$PATH
cmake --version
cmake version 3.28.3拷贝编译工具
为了简化开发中命令的配置,我们针对arm架构以及aarch64架构集成了几个编译命令,存放在lycium/Buildtools目录下,在使用lycium工具前,需要将这些编译命令拷贝到SDK对应的目录下,具体操作如下:
cd lycium/Buildtools # 进入到工具包目录sha512sum -c SHA512SUM # 可校验工具包是否正常, 若输出"toolchain.tar.gz: OK"则说明工具包正常,否则说明工具包异常,需重新下载tar -zxvf toolchain.tar.gz # 解压拷贝编译工具cp toolchain/* ${OHOS_SDK}/native/llvm/bin # 将命令拷贝到工具链的native/llvm/bin目录下设置编译机cmake识别OHOS系统
由于sdk中的cmake版本过低, 导致很多开源库在cmake阶段报错. 这个时候就需要用户在编译机上安装一个高版本的cmake(推荐使用3.26及以上版本). 但是 cmake官方是不支持OHOS的. 解决方案:
cp $OHOS_SDK/native/build-tools/cmake/share/cmake-3.16/Modules/Platform/OHOS.cmake xxx(代表你编译机安装的cmake的路径)/cmake-3.28.3-linux-x86_64/share/cmake-3.26/Modules/Platform做完以上这些,再次运行 ./build.sh libxml2
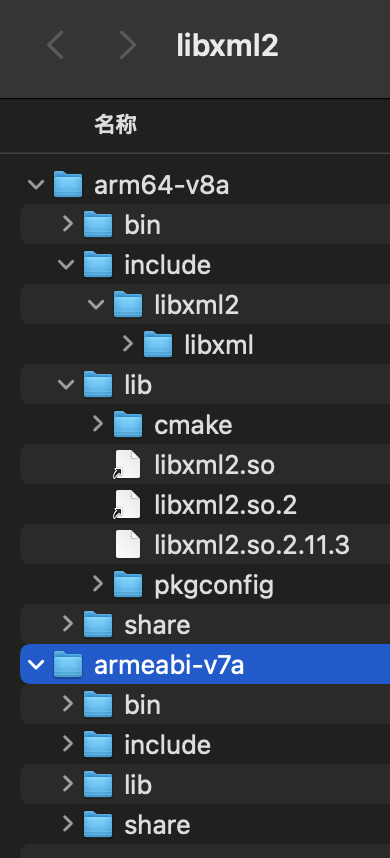
编译的产物会在 lycium/usb 目录下, 就会有 libxml2 文件夹,进入 libxml2,里面是长这样的,然后把include 和 lib 拷贝到鸿蒙工程里就可以使用了。


)












计算机视觉(opencv)实战八——四种边缘检测详解:Sobel、Scharr、Laplacian、Canny)



