# 查看Jenkins服务启动时的环境变量
sudo systemctl show jenkins | grep -i port
从systemd服务信息可以看到,Jenkins的环境变量中 JENKINS_PORT=8080,这说明systemd服务配置覆盖了 /etc/default/jenkins 文件中的设置
1. 查找Jenkins的systemd服务文件
# 查找Jenkins服务文件
find /etc/systemd -name "*jenkins*" -type f# 或者查看systemd服务状态
sudo systemctl status jenkins2. 查看Jenkins服务的完整配置
# 查看Jenkins服务的完整systemd配置
sudo systemctl cat jenkins3. 创建Jenkins服务的覆盖配置
# 创建Jenkins服务的覆盖配置目录和文件
sudo systemctl edit jenkins在编辑器中添加以下内容:
[Service]
Environment="HTTP_PORT=9090"
Environment="JENKINS_PORT=9090"
Environment="JENKINS_ARGS=--webroot=/var/cache/jenkins/war --httpPort=9090"快捷键说明:
文件操作
- ^X Exit - Ctrl+X:退出编辑器
- ^O Write Out - Ctrl+O:保存文件
- ^R Read File - Ctrl+R:读取文件
编辑操作
- ^W Where Is - Ctrl+W:搜索文本
- ^K Cut Text - Ctrl+K:剪切当前行
- ^U Uncut Text - Ctrl+U:粘贴文本
- ^T To Spell - Ctrl+T:拼写检查
- ^C Cur Pos - Ctrl+C:显示光标位置
- ^_ Go To Line - Ctrl+:跳转到指定行
撤销/重做
- M-U Undo - Alt+U:撤销
- M-E Redo - Alt+E:重做
标记和复制
- M-A Mark Text - Alt+A:标记文本
- M-6 Copy Text - Alt+6:复制文本
对于你的Jenkins配置任务:
- 保存配置:按 Ctrl+O,然后按 Enter 确认
- 退出编辑器:按 Ctrl+X
如果你不熟悉nano,也可以使用vi编辑器:
# 退出nano(Ctrl+X),然后使用vi
sudo vi /etc/systemd/system/jenkins.service.d/override.conf4. 重新加载systemd配置
sudo systemctl daemon-reload5. 重启Jenkins服务
sudo systemctl restart jenkins睡10s
sleep 106. 验证配置是否生效
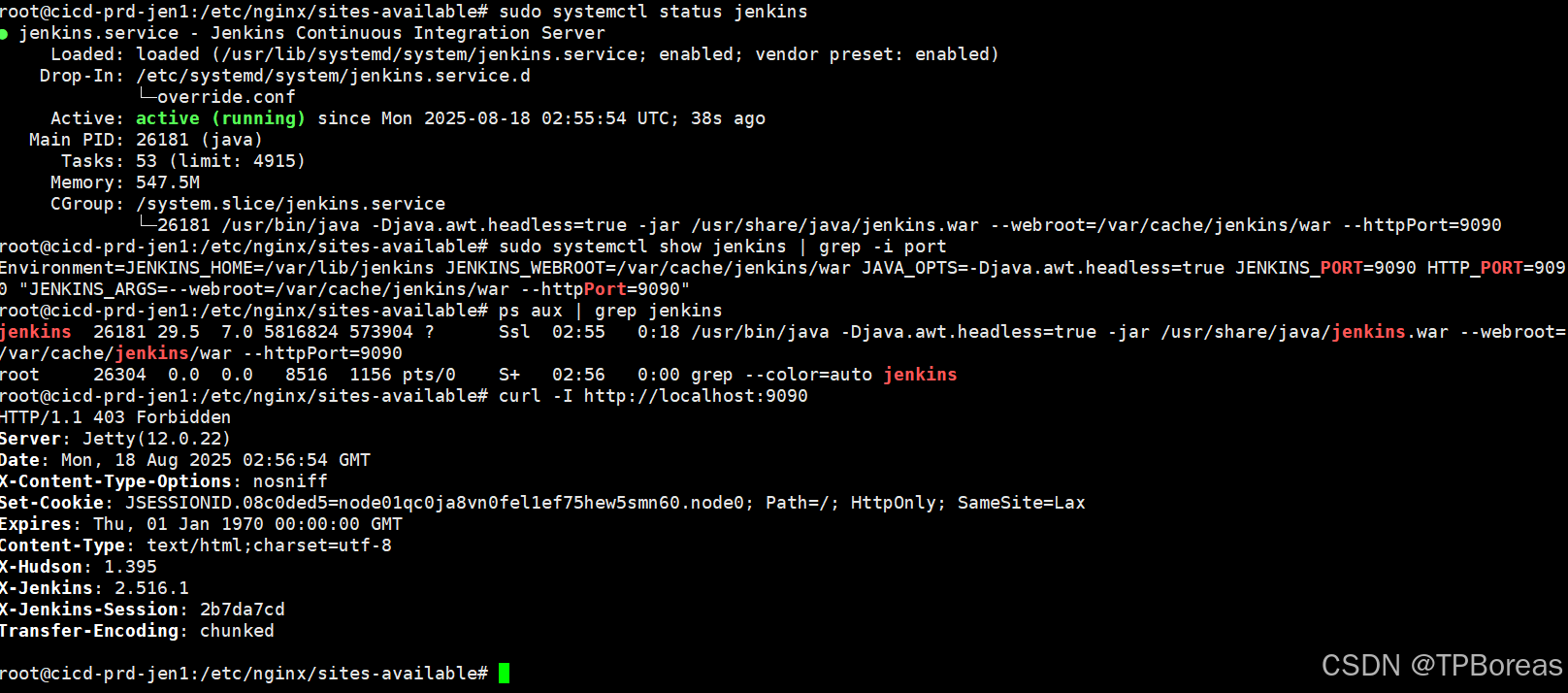
# 查看Jenkins服务状态
sudo systemctl status jenkins# 查看环境变量
sudo systemctl show jenkins | grep -i port# 查看Jenkins进程
ps aux | grep jenkins# 检查端口监听
netstat -tlnp | grep jenkins7. 测试新端口
curl -I http://localhost:9090大工告成





自定义类型:结构体)
)










?)

