补盲lidar设计:机械式和半固态这里不再讨论,这里主要针对全固态补盲Lidar进行讨论
1、系统架构设计
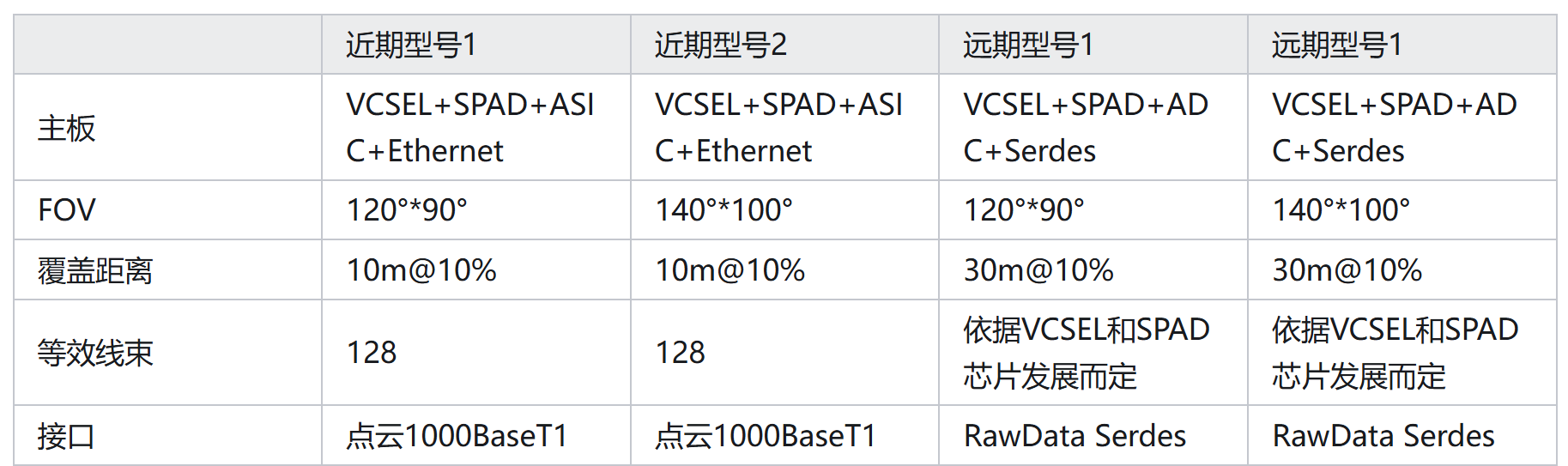
采用Flash方案, 设计目标10m@10%,实现30m距离的点云覆盖,同时可以验证不同FOV镜头的设计下,组合为多款产品。
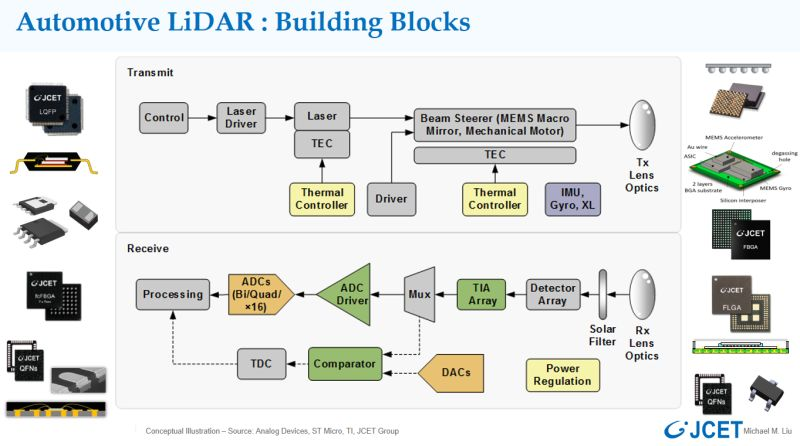
具体架构参考设计如下
以上工作可以有基于如下信息展开:
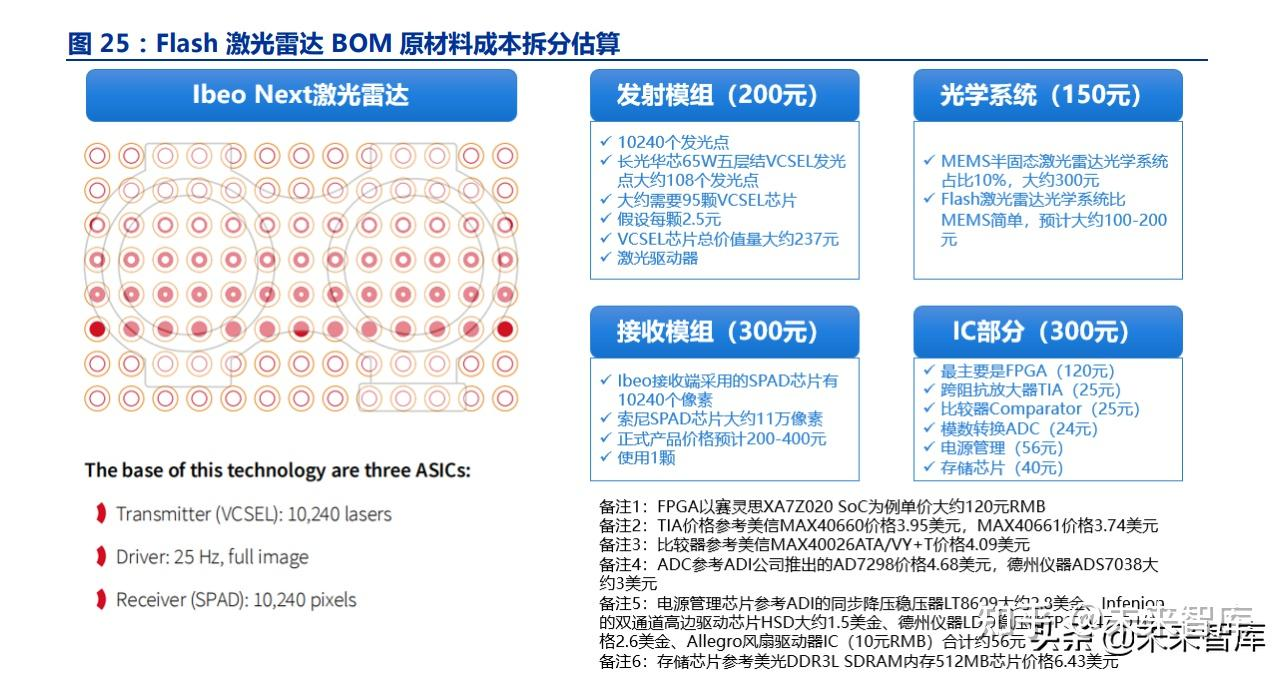
BOM成本参考如下,但是该成本参考比较老,为2021年左右的成本报价,另外该设计比较激进,感知距离为300m,核心器件方面采用了来自AMS的VCSEL面阵阵列以及Onsemi的SPAD面阵;
Lidar的光学镜头部件厂家有:舜宇光学、蓝特光学、福晶科技、永新光学、福特科光电、水晶光电、富兰光学、炬光科技、腾景科技等,炬光科技进行了发射模组+光学元器件双布局。
VCSEL芯片,国外主要是 Lumentum 和 AMS,国内主要是长光华芯、纵慧芯光、柠檬光子(HCSEL)。;
SPAD芯片,国外主要是索尼、佳能,国内主要是阜时科技、宇称电子、飞芯电子、灵明光子、芯视界、奥比中光;其中阜时科技刚在极氪X9的补盲Lidar获得定点;奥比中光预计明年发布SPAD并搭载至自研Flash激光雷达中。
Lidar端的信号处理这块主要是FPGA(赛灵思)。另外LeddarTech:核心产品是 Flash 激光雷达信号处理 SoC 和信号处理软件,定位更偏 Tier2,其次是 Tier1,核心在于其自研的 Flash 激光雷达数据采集和信号处理 SoC(LeddarCore)及信号处理算法(LeddarSP);中国台湾的公司瀚昱能源也和 LeddarTech 定位相同,于 2018 年推出了 Flash 激光雷达 SoC 芯片 HYCA2 的首款 A样。LeddarTech 分别于2018 年和2019 年推出LCA2 和LCA3 两款Flash激光雷达 SoC,其中 LCA2 主要用于中短距离探测、LCA3 主要用于中长距离探测。公司在 2019 年 9 月发布基于 LCA2 的 Flash 激光雷达 Leddar Pixell。
另外Ouste号称是第一家将高性能SPAD和VCSEL方案商业化的公司,其VCSEL和SPAD以及SOC均为定制开发;
Xenomatix提供两款Flash版Lidar,分别为近距和远距。
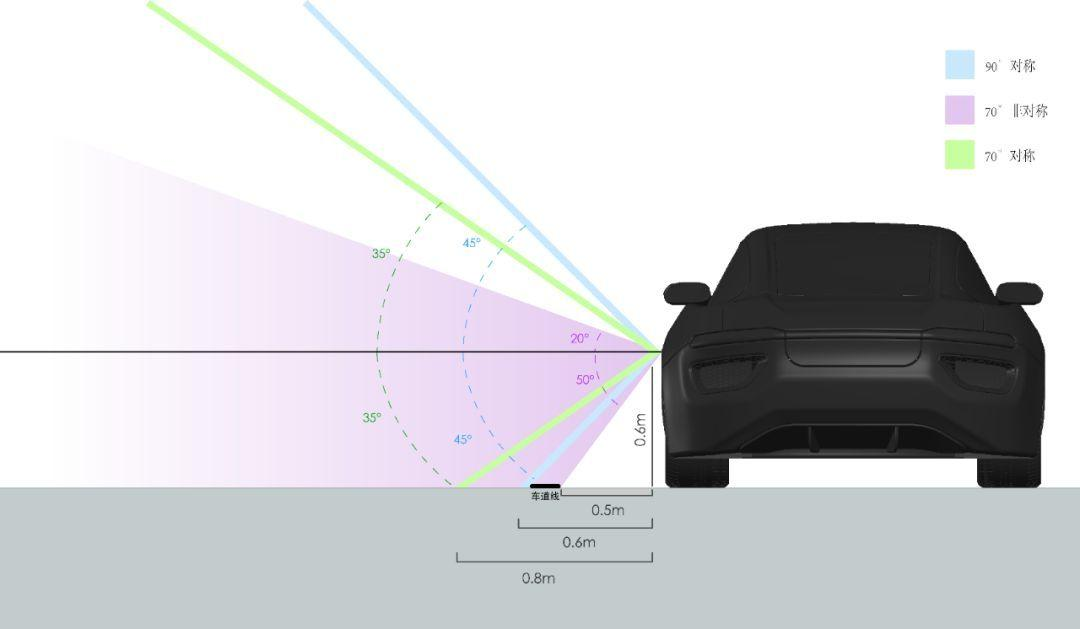
2、补盲Lidar技术指标设计

以上Lidar的水平FOV和垂直FOV都会依据具体的应用场景以及车身布置位置进行调整,该调整通过Lidar的Lens进行设计配置。 速度和速度分辨率,这两个指标需要通过FMCW技术完成,如果是常规的TOF技术,速度是通过Kalman滤波进行估算(不在Lidar端完成,在域控端完成),不是直接测量值。
3、Lens设计:
Lens主要是Lidar方提出Lens的设计要求,具体设计Lens供应商负责;
Lens作为Lidar部件,最终组合装配以及Lidar性能测试由Lidar方负责。
4、主板以及收发板设计:
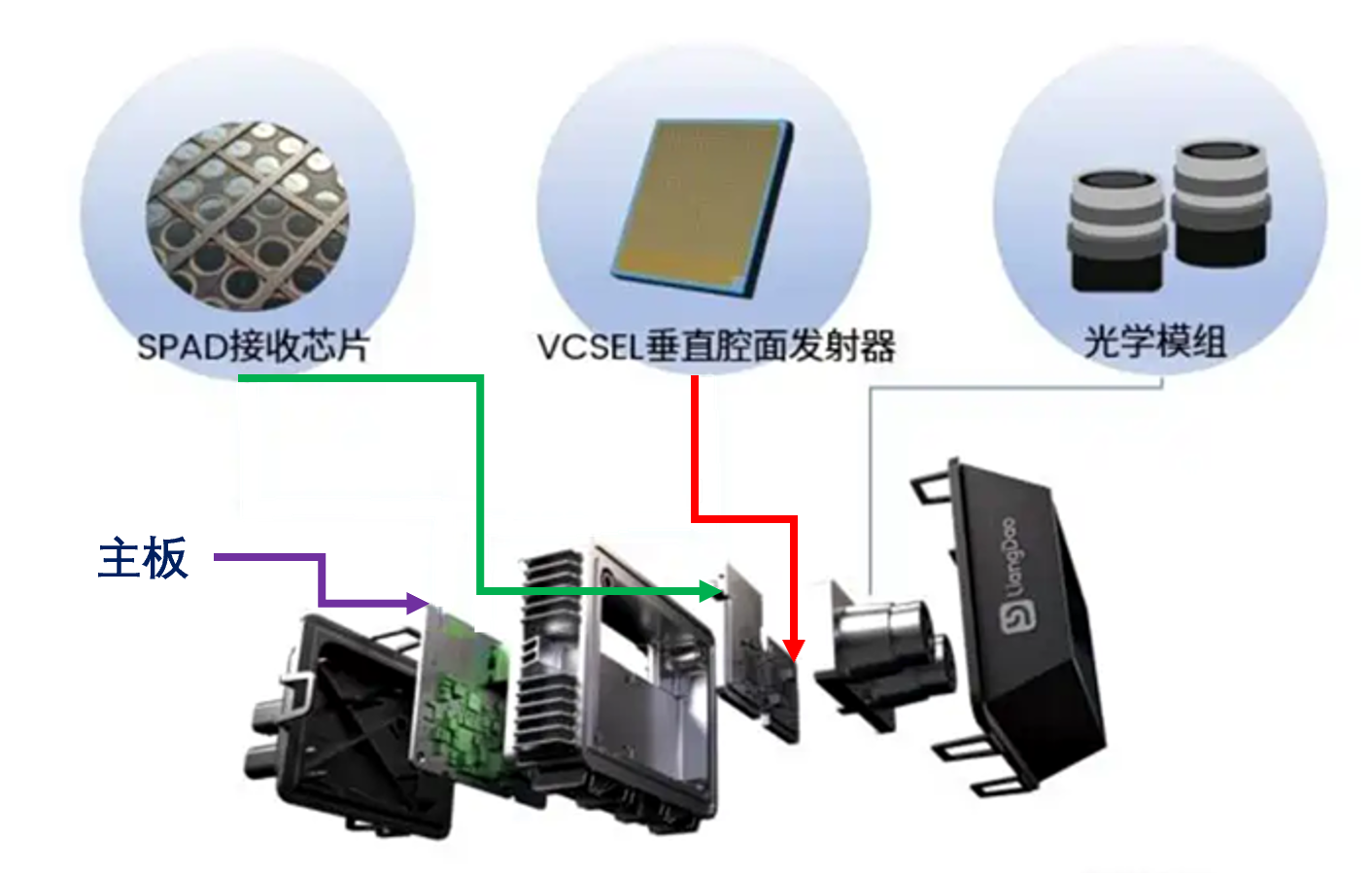
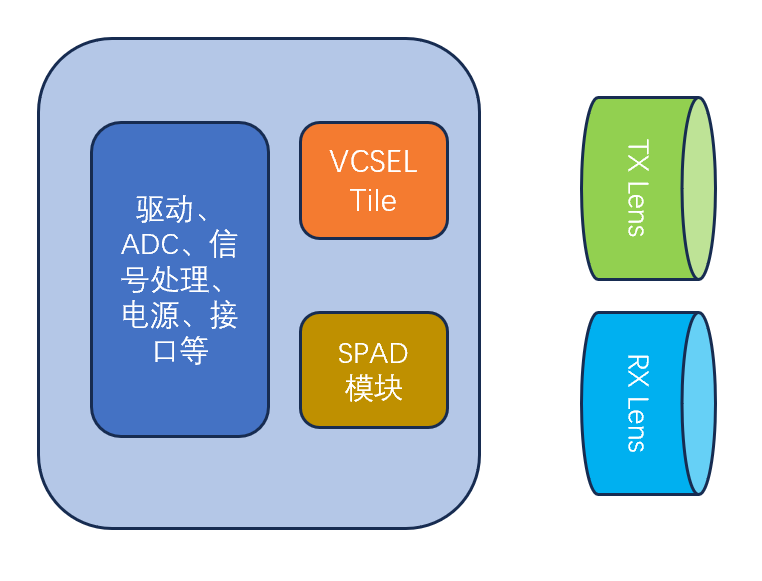
参见图2,主板上主要包括
驱动控制以及信号采集处理板;、
VCSEL发射阵列板;
SPAD接收板;
以上三块板是单板设计还是分板设计需要讨论,从图1可以看到,里面涉及到模块散热,需要具体讨论。
5、数据接口设计
如果不在Lidar端进行信号处理,则数据(Raw Data)输出端口采用CSI2接口,后续接Serdes芯片,直接输出到域控端处理;
若果在Lidar端进行信号处理,则数据(Point Cloud)输出端采用1000BaseT1或者100BaseT1;
6、后端算法设计
Lidar Flash版:无速度信息,主要基于3D稀疏阵的特征提取,最终进行语义分割,从而类似于视觉感知方案,进行目标识别与跟踪,以及环境感知刻画,后续送给不同Head模块。需要进行算法有效作用距离的实验,包括对汽车、VRU以及小目标等。
在目标目标跟踪以及环境刻画完成输出,会分别和Camera/Radar的动态目标以及静态环境进行融合;
L2以上需要感知融合链路的多样性,尽量减少共因失效;
融合方案上看前融合、中融合、后融合对原始信息的保留量依次递减,但是对噪声干扰的滤除也是依次递增,所以需要最大化最优化利用Lidar输出数据进行处理;
单纯的Lidar传感器硬件层面是这些数据融合的共因来源,硬件上无法避免共因失效,但是算法层面上,前融合、中融合、后融合的交叉使用,可以提升环境感知算法和目标跟踪算法的置信度;
7、Flash Lidar整体技术路线图
具体如下: 长距Lidar(Flash版)、短距Lidar(Flash版)。其中长距Lidar(Flash版)需要依据收发芯片的迭代演进,如果收发芯片有比较大的提升,可以考虑进行长距Lidar(Flash版)相关设计。
目前主流的长距Lidar技术指标为FOV120°,探测距离150m @10%,但是该产品是基于半固态Lidar方案(VCSEL+SiPM/SPAD+一维转镜),该方案的技术指标应该是以禾赛AT128为蓝本。
如果长距Lidar(Flash版)可以参考上述进行相关技术路线图整理。
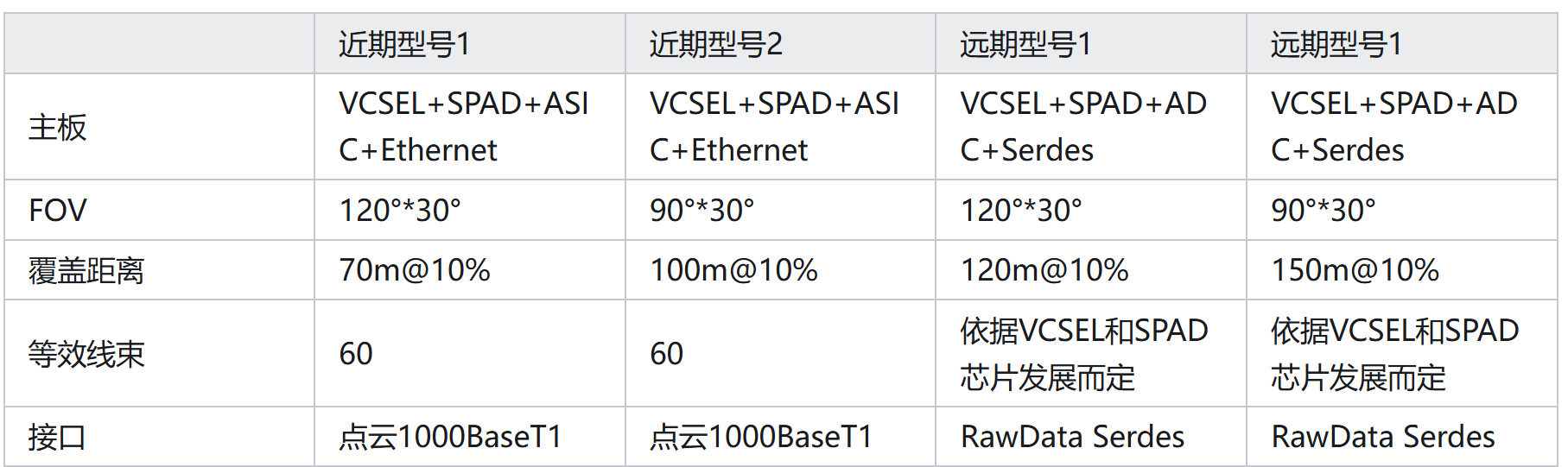
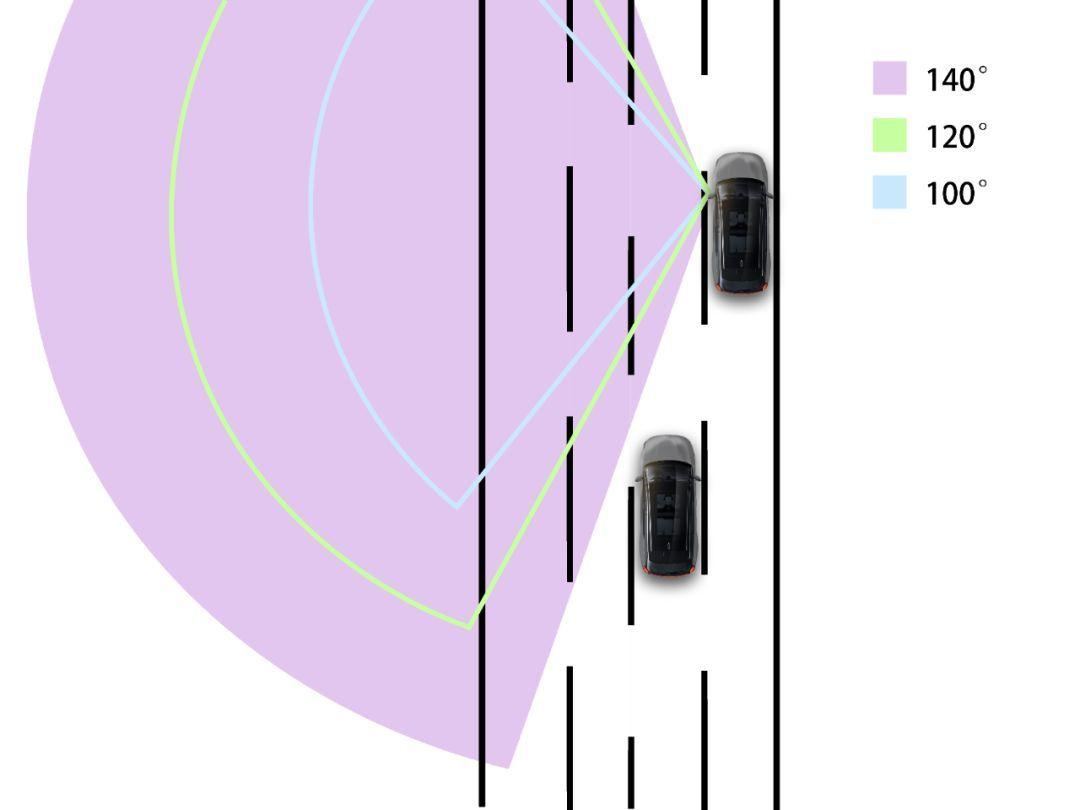
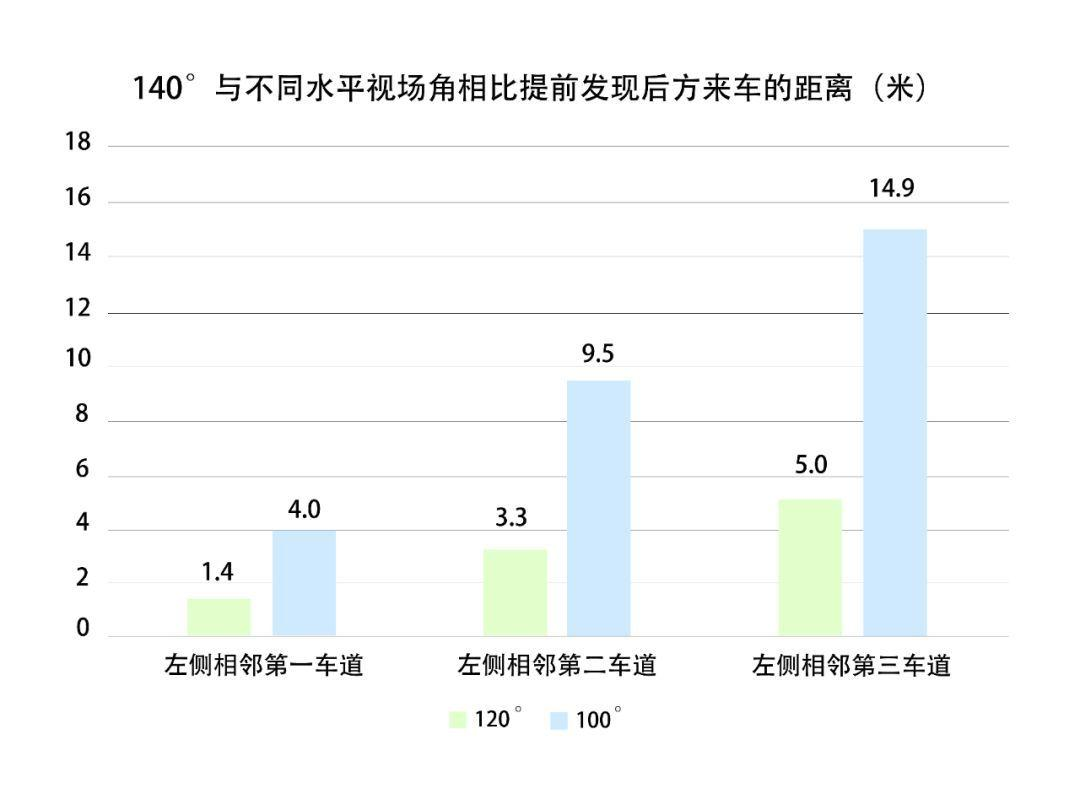
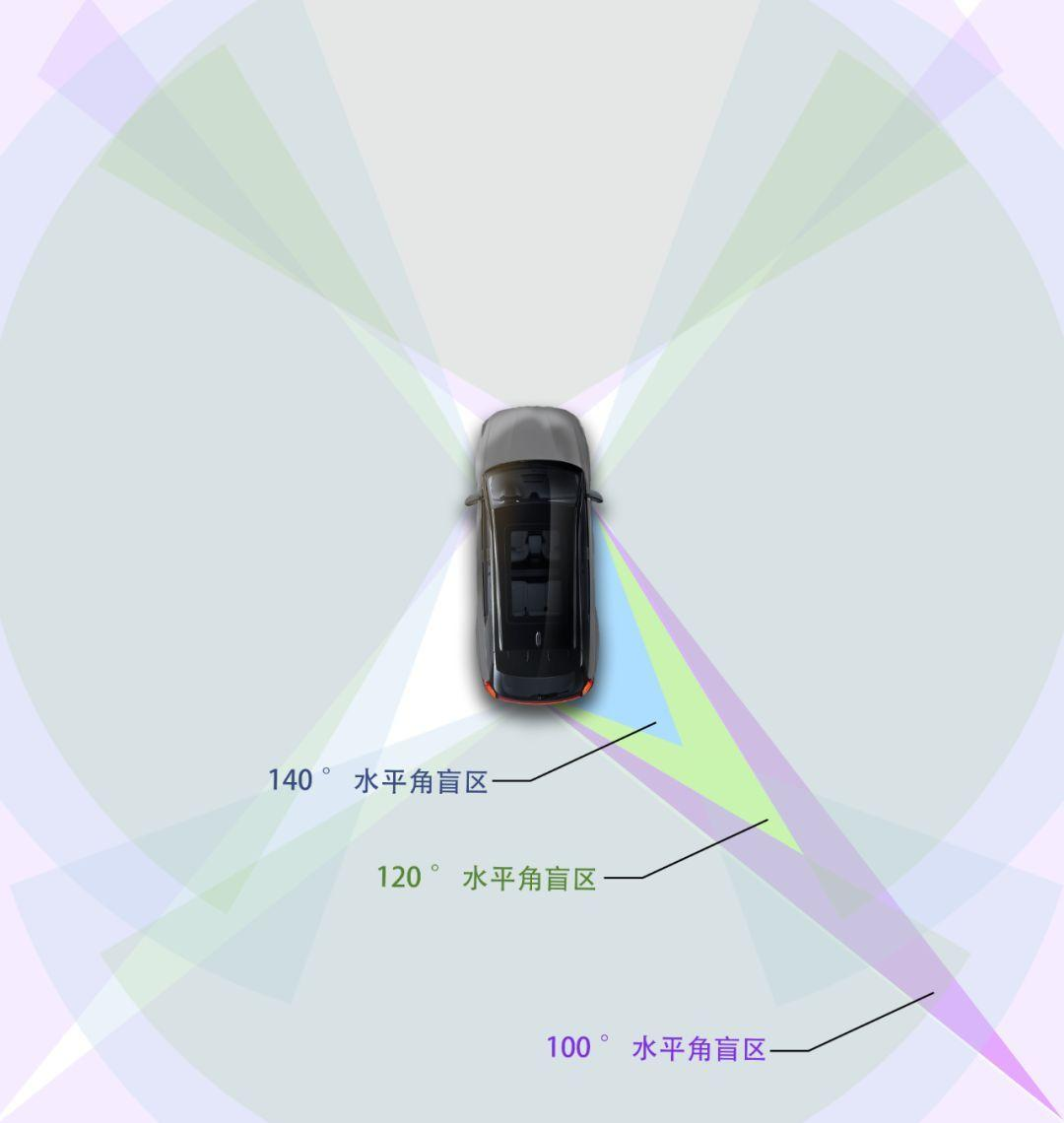
如果短距补盲Lidar(Flash版),其探测距离一般会控制在10m@10%,或者更高,但是其FOV一般会做的比较大,甚至HFOV达到了140°以上(VFOV也会在90°左右),以确保补盲效果。
8、整体技术可行性和风险分析
从以上1-7点的分析可以看到,技术具有可行性,行业在不断迭代,逐步走向成熟,后续固态Lidar的市场将迎来成熟期或者说是爆发期;
从行业发展,Flash版相应的芯片和模块推出,并且也有相关方案的Lidar推出,这些都在不断迭代成熟中;
同时全固态Lidar的发展方向是行业的一个共识;
域控算力集中化,Lidar传感器低成本化,是整体行业趋势;
接口后续从车载以太网向高速Serdes网络迭代;
风险如下
固态Lidar所存在的技术瓶颈,Flash主要是面光源(MEMS 等扫描方式为点光源),因此能量相比点光源较为发散,难以到达远距离探测。影响Flash激光雷达性能的部件主要是发射模块的垂直腔面 发射激光(VCSEL)及接收模块中的单光子雪崩二极管(SPAD)。VCSEL方面,目前商用VCSEL发射功率不断提升,同时VCSEL阵列实现相同峰值功率下对车辆前方更远距离的探测。SPAD 方面,其发展目前同样沿着摩尔定律式的性能曲线移动,随着SPAD的快速发展FLASH 激光雷达有望率先成为商用于中距离探测的固态式激光雷达。
成本问题,从成本构成看,收发模组占据着分立式激光雷达60%的成本,人工调试占据25%的成本,机械、控制模组等其它零部件仅占据15%的成本;对于半固态激光雷达,收发器件(激光器、探测器)及芯片占据70%以上的成本,而光学等其他部件占比不足30%。后续切换到全固态Lidar后,机械结构成本去除,人工调成成本几乎可以忽略,但是全固态Lidar初期,收发芯片成本会高于半固体Lidar,这个需要量产规模来促使收发芯片成本的不断降低,另外可以通过收发芯片模块的通用化涉及,以及更换收发Lens来适配各种应用需求,进一步促使全固态Lidar成本的降低。








)
)



)

)



)