通过身临其境的模拟,宇航员可以完善他们在太空行走中执行的每一个动作,以确保更好地准备前往国际空间站、月球和其他地方执行任务。
VR/XR技术在宇航员训练中的优势:
提高安全性:复杂或危险程序的无风险实践
成本和资源节约:减少对实体模型、物流和人员的需求
灵活且可扩展:易于适应各种培训场景
增加重复次数:允许多次练习,加强肌肉记忆
时间效率:减少总体培训持续时间和日程安排需求
增强沉浸感和参与度:更加现实、激励人心的培训体验
更好的空间定位:改善微重力环境下的思维映射
下一代太空探索准备工具
让宇航员为载人航天任务做准备需要数年的准备和数百小时的复杂模拟训练。没有出错的余地,任务的成功取决于完美的执行。

Varjo与PaleBlue合作的零重力实验
为此欧洲航天局位于德国科隆的欧洲宇航员中心正在不断寻求新的、创新的方法来加强宇航员培训。
他们专注于扩展现实(XR)、人工智能、量子技术和物联网&机器人的团队开发了专门为欧空局宇航员量身定制的高级可视化、交互式培训模块和现实模拟。他们的主要目标是创造高度身临其境和引人入胜的培训体验,以补充传统的培训方法。
为了确保最大的准确性和有效性,XR实验室团队在整个开发过程中与宇航员教练和指导员密切合作。这种密切的合作关系确保了每一个沉浸式训练场景都准确地反映了宇航员将会遇到的真实世界条件。
宇航员如何进行太空行走训练——以及为什么它如此复杂
当宇航员为舱外活动(EVAs)或太空行走进行训练时,每个步骤和动作都要练习数千次。这种训练是资源密集型的,昂贵的,耗时的,因为它很大程度上依赖于美国国家航空航天局中性浮力实验室的大量物理实践。
休斯顿的这个大型泳池设施展示了国际空间站(ISS)的详细水下模型。宇航员两人一组在那里训练,穿着重量平衡的特制宇航服,以确保他们既不会上浮也不会沉到底部。
这些场景是至关重要的,因为EVAs训练内容极其复杂:它们通常持续6到10个小时,涉及专门的工具,并需要宇航员从气闸到工作地点移动的复杂路径。
传统的泳池训练有其固有的局限性。水下模拟不同于真实的空间条件,因为水的阻力、视觉线索的改变和重力的残余感觉等因素。此外,设置这些会话需要大量的安全措施、调度支持人员的后勤以及大量的准备时间。

水下中性浮力训练
宇航员迈出虚拟的一步,训练迈出巨大的一步
认识到这些局限性,欧空局正在开发基于头戴式耳机的VR/XR模拟,专门用于补充现有的训练方法,如中性浮力池。使用虚拟和混合现实,宇航员可以体验真正的失重状态,反复练习精确的动作,并比传统方法更有效地想象复杂的环境。
由于灵活且易于访问的虚拟环境,通过引入一种新的训练方式,宇航员可以缓解他们在地面准备期间的紧张时间安排压力,因为他们在地球上的训练时间通常很长,且要求很高。
“鉴于这些复杂性,有机会用虚拟现实模拟来补充训练是非常有益的。虚拟现实提供了一个额外的实践层,允许宇航员进一步完善他们的学习步骤,”欧洲航天局的触觉和XR工程师安德烈亚斯·特鲁尔说到。
此外,VR/XR可以模拟通过传统方法几乎不可能或不切实际地重现的场景。例如,当宇航员第一次打开气闸室,看到地球就在他们的正下方,这种体验在他们的第一次太空行走中可能带来巨大的压力,但通过事先体验虚拟现实中的场景,宇航员会熟悉情绪和感官强度,这在水下模拟中是无法充分复制的。
在VR中掌握国际空间站的机械臂
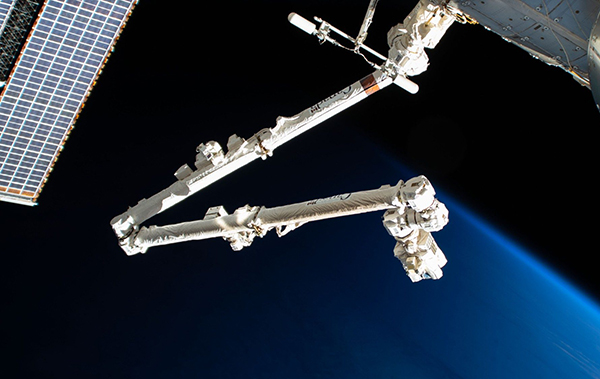
国际空间站的加拿大2号机械臂
沉浸式技术也为机器人培训提供了显著的优势。在欧空局的混合现实机器人教练解决方案中,宇航员可以虚拟地练习操作和操纵国际空间站的18米机械臂——由于巨大的基础设施要求、安全风险和后勤复杂性,这种场景在地球上几乎不可能实际复制。通过戴上头显访问虚拟副本,学员可以以正确的比例和视角真实、安全地学习机械臂操作。
“我们的虚拟现实训练的主要目标是为宇航员提供一个实用的工具,让他们可以安全地练习程序,零成本试错,并在他们在真实环境中执行这些任务之前根据需要经常重复练习,”欧洲航天局的XR软件工程师弗洛里安·塞林说到。
这种培训方法的结果已经很明显了。欧空局的XR实验室估计一半的机器人培训以前通过传统方法完成的工作现在可以被XR模拟有效地取代。这导致了机器人操作培训时间总体减少约50%,而不会对性能产生负面影响,并保持宇航员熟练程度的高标准。欧空局也与美国国家航空航天局分享了这一培训软件。
“我们的最终目标是将VR的使用扩展到它可以有效支持宇航员活动的每个领域。”-欧洲航天局XR软件工程师弗洛里安·塞林。
在离开地球之前,在月球上行走并修理国际空间站
除了机器人培训,ESA还使用了其他几个关键软件应用程序来提供身临其境的宇航员培训体验。其中之一是LUNA XR,这是一个大型模拟器和VR探索工具,可以高细节地再现月球景观。
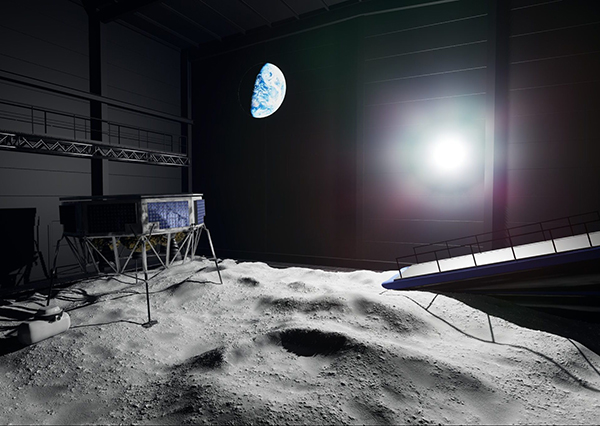
通过LUNA XR,学员可以与各种元素互动,甚至通过投掷石块和观察物体在失重环境中的行为来直接体验月球重力。
另一个重要工具是EVA太空行走训练工具,它提供了宇航员在进行太空行走时处理的不同组件的高度详细的虚拟现实可视化。这些模拟使受训人员能够熟悉国际空间站外部和内部环境的不同方面。他们可以探索空间站的外部,以准确了解他们在太空行走期间将在哪里执行任务。
在空间站内,受训者可以研究内部系统的详细布局,包括技术机架、气闸和灭火器等应急设备的位置。训练软件甚至允许宇航员练习复杂的维护程序,例如更换氧传感器或去离子装置——这些任务最终必须在空间站上执行。
重复、现实和结果——为什么宇航员喜欢VR/XR训练
欧空局的XR实验室可根据每个太空旅行者的个人训练目标定制沉浸式训练场景。使用ESA的VR/XR解决方案进行训练的宇航员往往会提供热情的反馈,强调这些身临其境的体验如何很好地补充传统的训练方法。
VR/XR训练让他们有机会练习太空探索中标志性的、令人兴奋的方面——如进行太空行走或控制机械臂——这些任务自然会激发和激励他们。“宇航员喜欢使用这些虚拟现实应用程序。它更有吸引力,与他们通常经历的其他类型的培训完全不同,”特鲁尔指出。
根据欧空局XR小组的说法,宇航员很高兴能够多次重复程序,让他们记住每个动作,直到成为肌肉记忆。“这种精确程度的重复训练方法并不常见”特鲁尔说。
扩大VR/XR在空间任务中的作用
欧空局还在传统的宇航员培训之外应用虚拟和混合现实。他们已经在初始阶段的产品设计中利用该技术来测试空间设备接口,并在开发早期识别人体工程学或实际问题。他们还在建筑应用中使用了沉浸式技术:
虚拟现实帮助项目经理可视化和优化欧空局新的月球模拟设施的布局,从而在投入建设之前进行改进。
展望未来,欧空局的XR实验室正在探索VR/XR的许多新的操作用途。他们现在专注于将混合现实能力集成到他们的月球模拟中,以使宇航员训练中的月球景观更加身临其境。欧空局还旨在将VR/XR应用扩展到操作环境,包括支持监督国际空间站和与之通信的地面控制人员。
虚拟现实也有可能在长期太空任务中支持宇航员的精神健康:基于头显的沉浸式体验可以让宇航员从受限环境的中逃离出来,提供放松、娱乐甚至治疗。
“我们的最终目标是将虚拟现实的应用扩展到能够有效支持宇航员活动的每一个领域,”萨林说到。
随着沉浸式技术的不断成熟,欧空局对VR和XR的大胆推进不仅可以重新定义宇航员的训练方式,还可以重新定义人类如何为下一个前沿领域做好准备。



)

工艺库命名规则)

)



![[7-01-03].第03节:环境搭建 - 集群架构](http://pic.xiahunao.cn/[7-01-03].第03节:环境搭建 - 集群架构)




)
关于变量的声明和定义)

