目录
一、发展历程
二、软件+硬件+算法深读耦合 感知 - 决策 - 执行
1.机械系统:
2.驱动系统:
3.感知系统:
4.控制系统:
5.决策/智能系统:
6.电源系统:
7.总结
一、发展历程
国际标准化组织(ISO)对机器人的定义是:机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器
第一代(遥控操作器):主要通过人工遥控操作,功能较为简单,应用范围有限
第二代(可编程机器人):能够按照事先编好的程序自动重复完成某种操作,具有一定的自动化能力,广泛应用于工业生产。
第三代(智能机器人):利用各种传感器获取环境信息,通过智能技术进识别、理解、推理并作出规划决策,能够自主行动实现预定目标。
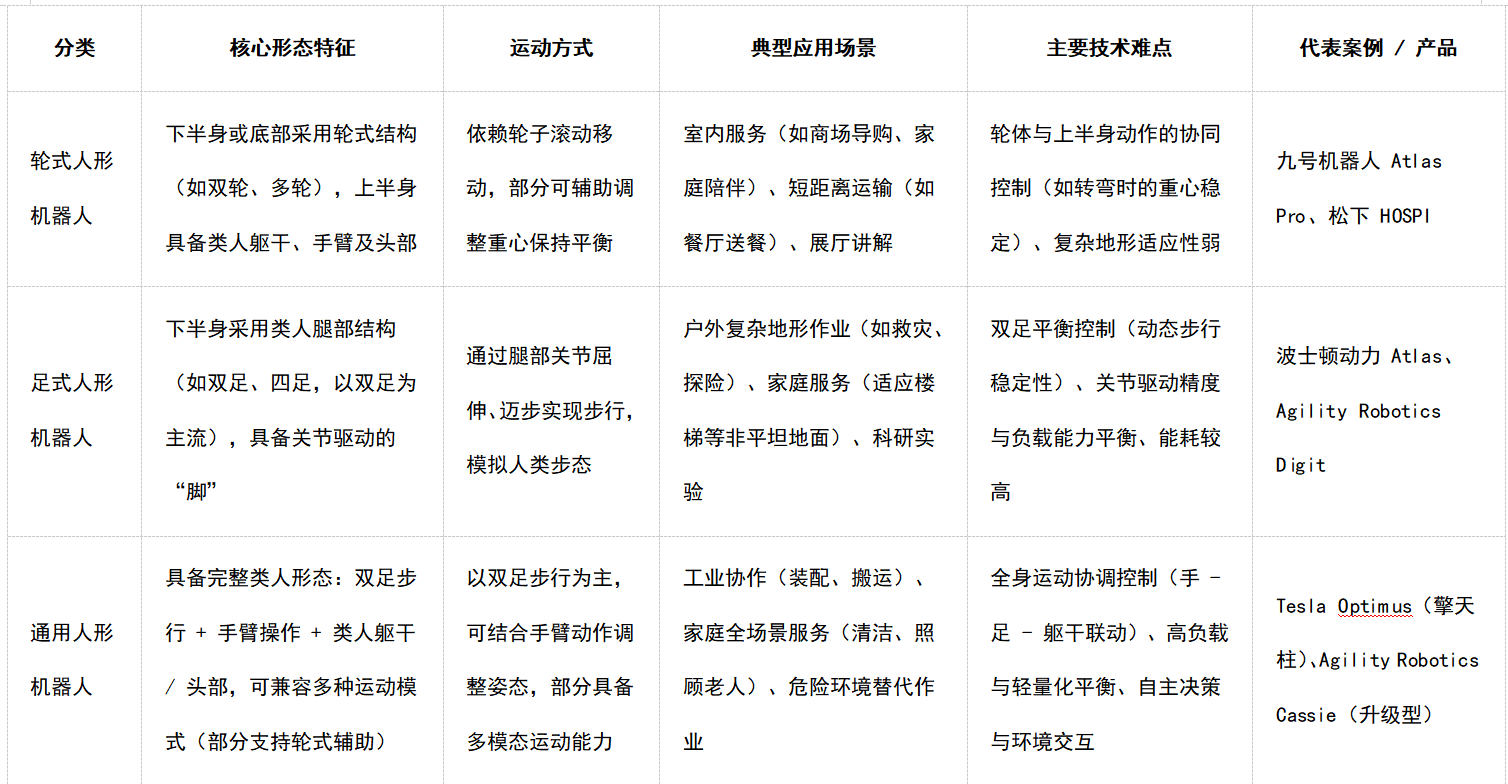
根据人形机器人的形态,可以将其分为轮式人形机器人、足式人形机器人、通用人形机器人。
二、软件+硬件+算法深读耦合 感知 - 决策 - 执行
机器人是由多个相互协作的系统组成的复杂整体。这些系统共同实现了机器人的感知、决策、执行和与环境交互的能力。主要可以归纳为以下几个核心系统:
1.机械系统:
功能:构成机器人的物理结构,提供支撑、运动、操作和与环境交互的能力。
组成:
骨架/框架:支撑所有其他部件的基础结构。
关节:允许部件之间相对运动的连接点(如旋转关节、滑动关节)。
连杆/臂:连接关节并传递运动和力的刚性部件。
末端执行器:位于机器人肢体末端的工具或装置,直接与环境或工作对象交互(如夹爪、焊枪、吸盘、喷枪、传感器探头等)。
移动平台:对于移动机器人(如轮式、履带式、腿式),提供整体移动能力。
2.驱动系统:
功能:提供动力,驱动机械系统的关节或轮子运动。
组成:
执行器:将能量(通常是电能或液压/气压能)转化为机械运动的装置。
电机:最常用,包括直流电机、步进电机、伺服电机(精度高、带反馈)。
液压缸/液压马达:提供大力矩/力,常用于大型工业机器人或工程机械。
气压缸/气压马达:结构简单、成本低、响应快,但力量相对较小,精度较低。
传动装置:将执行器的运动和力传递到关节或轮子上,并可能改变速度、力矩或运动方向(如齿轮箱、皮带、链条、滚珠丝杠、谐波减速器)。
3.感知系统:
功能:收集机器人自身状态和周围环境的信息,相当于机器人的“感官”。
组成:
内部传感器:监测机器人自身状态。
位置/角度传感器(编码器、电位器、旋转变压器)。
速度传感器(测速发电机、编码器)。
加速度传感器(加速度计)。
力/力矩传感器(安装在关节或末端执行器)。
电流/电压传感器(监测驱动器状态)。
外部传感器:感知外部环境。
视觉传感器(摄像头:2D/3D、深度相机)。
距离传感器(超声波、红外、激光雷达)。
触觉传感器(压力、阵列)。
接近传感器。
惯性测量单元(IMU:加速度计+陀螺仪,有时+磁力计)。
麦克风(声音)。
气体传感器、温度传感器等(特定应用)。
GPS(室外定位)。
4.控制系统:
功能:机器人的“小脑和脊髓”。根据任务指令和传感器反馈,计算并向驱动系统发送控制信号,精确控制机械系统的运动。负责底层运动控制(位置、速度、力控制)和协调。
组成:
控制器硬件:
微控制器:处理简单任务。
微处理器:处理复杂计算。
数字信号处理器:高效处理传感器信号(如图像、声音)。
可编程逻辑控制器:工业环境常用。
专用运动控制卡。
控制算法:
运动学计算(正/逆运动学)。
动力学计算(考虑力和惯性)。
路径规划(生成平滑轨迹)。
PID控制、自适应控制、阻抗控制、力控制等。
输入/输出接口:连接传感器和执行器。
实时操作系统:确保控制循环的精确时序。
5.决策/智能系统:
功能:机器人的“大脑”。处理高级信息、理解环境、进行规划、做出决策、学习适应。负责任务规划、环境感知与理解(SLAM、物体识别)、导航、人机交互、学习等。
组成:
主处理器/计算单元:通常是更强大的CPU、GPU或AI加速芯片(如TPU),处理感知数据、运行复杂算法。
人工智能/机器学习算法:
计算机视觉(图像识别、目标检测、场景理解)。
自然语言处理(语音识别、语义理解)。
路径规划与导航算法(A,RRT,SLAM)。
任务与动作规划。
机器学习模型(深度学习、强化学习)。
软件框架与操作系统:如ROS、Linux等,提供开发、部署和运行软件的底层支持。
6.电源系统:
功能:为所有其他系统提供所需的能量。
组成:
电源:
电池(锂电池最常见,铅酸、镍氢等)。
外部电源(通过线缆供电)。
燃料电池、太阳能电池板(特定应用)。
电源管理单元:负责电压转换、稳压、充放电管理、能源分配和优化,保护系统免受电源问题影响。
7.总结:
机械系统是机器人的“身体”。
驱动系统是机器人的“肌肉”。
感知系统是机器人的“感官”。
控制系统是机器人的“小脑和脊髓”(负责精确运动)。
决策/智能系统是机器人的“大脑”(负责思考、规划和决策)。
电源系统是机器人的“心脏和血管”(提供能量)。
这些系统通过通信总线(如CAN总线、以太网、串口、无线通信)紧密连接,相互协作,使机器人能够感知、思考、行动并完成任务。随着技术的发展,各系统之间的界限有时会变得模糊(如集成传感的控制单元),但这种功能划分仍然是理解机器人构成的基本框架。








:从原理到现代实现演进)







中的应用探索)


